翔仪 垂直起降固定翼 操作流程
垂直起降固定翼 操作流程 01.地面站采用的是翔仪飞控软件
02.奥维互动定位平台 上规划飞行区域 长方形 为佳 覆盖作业范围200米以上 (防止漏拍发生)导出KML格式
地图切换里面 选择 GOOGLE卫星混合地图
例:下图不是一个正规的矩形 但规划航线需要尽量以矩形为主 宁可多划范围 (1)奥维地图 上使用 折线(Ctrl+b) 或者 转角线(Ctrl+t)对任务区进行规划
(2)在蓝色区域内进行规划(正射 或者 其他作业)的作业 所需范围
(3)红色区域为飞行任务所需要规划的范围 实际作业的范围要比任务规划的范围大 是为了防止 出现漏拍 或者其他意外情况发生 所以尽量 在保持电池电量足够的情况下 像外扩约50-100米区间的距离 以标准的长方形为佳
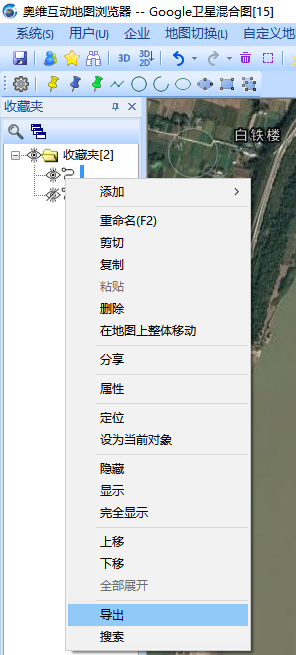
(4)奥维地图 收藏夹(视图–工具栏和停靠窗口)选中 任务所需的规划范围 导出 将其导出为KML文件 并保存
03.在地面站 里面 导入KML文件 规划好航线方向 选择第三个 任务规划 选择任务规划 选择 航测 KML区域导入 导入KML区域后的范围
鼠标右键中间的三个点 会有一个 编辑显示
选择照相参数 并计算生成
根据相机参数进行调整 航向 旁向 精度 分辨率进行重点确认 照片参数(航向65 旁向55 精度4)
选取航线方向 初步生成
合理位置选择 起降点 快捷键OR可以在红十字点直接生成起降点
并根据现场实际的风向 进行修改
基础确认后 点击最终生成
点击任务规划 上传 检查总航程 是否在70KM左右 偏差不大不做修改 偏差过大 分段进行 (或者 增加行高 降低密度 )
(L0 为旋翼模式起飞降落点 爬升一定高度切换至固定翼模式;) P1 和 P2 为起飞/转换引导点;(四转弯) O1 为起飞后盘旋爬升点;(爬升至作业高度) 序号 1、2、3、…… 为工作航点的序号,只有工作航点参与多圈巡航; O2 为降落时盘旋降高点;(降低至降落高度) E1 和 E2 为降落/转换引导点;(四转弯) E3 至 L0 过程中由固定翼模式切换至旋翼模式 L0 为降落点。
04.最终生成后 修改 O1点 高度 将其改为作业的航线高度
05.并检查飞行器从O1 点进入 1点的飞行内角是否大于90度 若小于90度 易造成拐弯过急 导致危险 06.并检查飞行器从结束点进入O2点的飞行内角是否大于90度 若小于90度 易造成拐弯过急 导致危险 可以看出60点到返航点的角是比较锐利的 所以需要在中间添加一个点 进行修改 任务规划 – 插入 注意当前航点 和 航点高度
07.检查完毕后 点击 当前点降落 以确认记录 确认无误后 点击 全部上传 上传后 建议读取下 上传的信息 检查是否上传成功
08.硬件部分:机身 机翼是否固定牢固 相机云台 插线是否正确 相机采用碳纤维板固定 板上有一个圆孔 是用来固定插槽 09.电池基本控制在 第二排的位置 前段留出约2CM左右距离 然后配平 散热片 边上 10.开启中继器WIFI(需单独电源) 开启遥控(美国手) 然后上电(自检10-20s) 11.地面站上对飞机进行飞行前检查
以上只能提供参考 如果以后有接触到其他机型也会写一些 只是目前就接触到这个 不敢说完全正确 只是提供参考











 任务规划
任务规划 选择任务规划
选择任务规划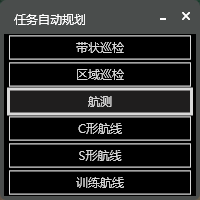 选择 航测
选择 航测 KML区域导入
KML区域导入 导入KML区域后的范围
导入KML区域后的范围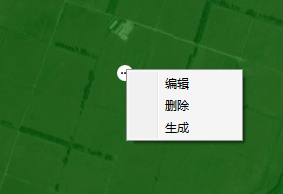 鼠标右键中间的三个点 会有一个 编辑显示
鼠标右键中间的三个点 会有一个 编辑显示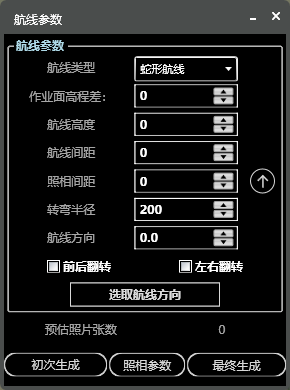 选择照相参数 并计算生成
选择照相参数 并计算生成 根据相机参数进行调整
根据相机参数进行调整 选取航线方向 初步生成
选取航线方向 初步生成
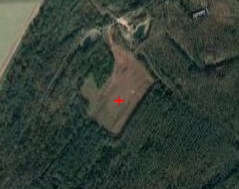 合理位置选择 起降点 快捷键OR可以在红十字点直接生成起降点
合理位置选择 起降点 快捷键OR可以在红十字点直接生成起降点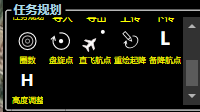







 任务规划 – 插入
任务规划 – 插入



