问题一
QGC显示:Detected 0 radio channels.To operate PX4,you need at least 5 channels.
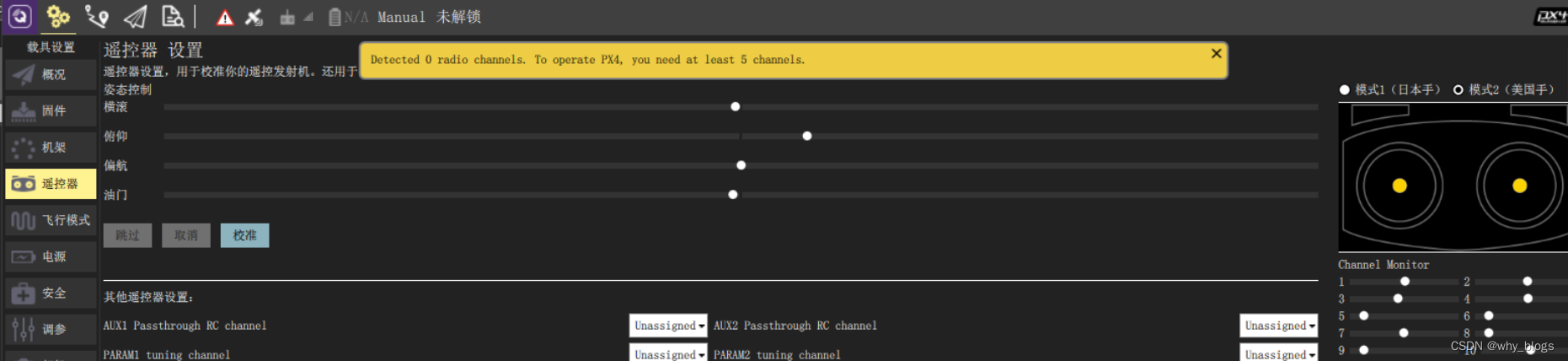
原因:RC插错位置
解决方案:SBUS对应的横向通道 或者 更新固件之后,在参数设置的地方查找sys_use_io : 选择rc和pwm都使用的选项。
问题二
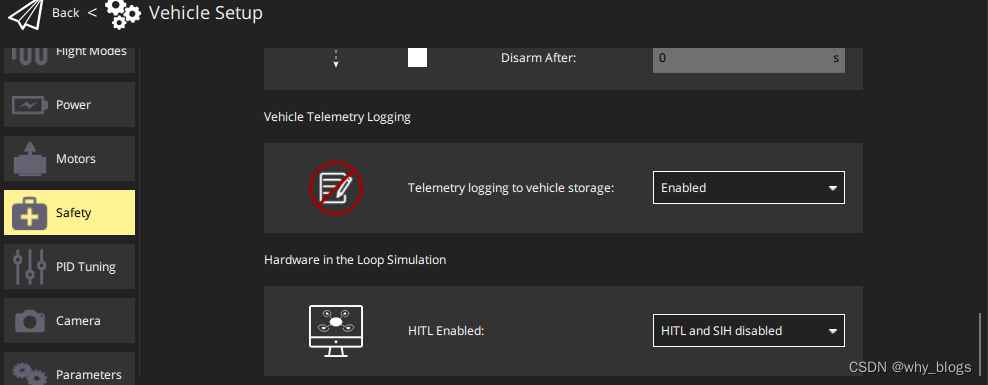
在准备进行无人机实飞时,QGC显示 : warning: hardware in the loop hitl simulation is enabled for this vehicle

原因:在safety 选择的是硬件在环仿真模式
解决方案:在safety中,将其改为HITL(硬件在环仿真) and SIL(软件在环仿真) disabled,即 关闭在环仿真模式。
问题三
在无人机线路连接正常时,但是其中某个电机无法正常转动
可能原因:未校准电调
解决方案 : 通过QGC进行电调校准,首先将无人机电池拔掉,点击校准;然后插上电池,校准完成。

问题四
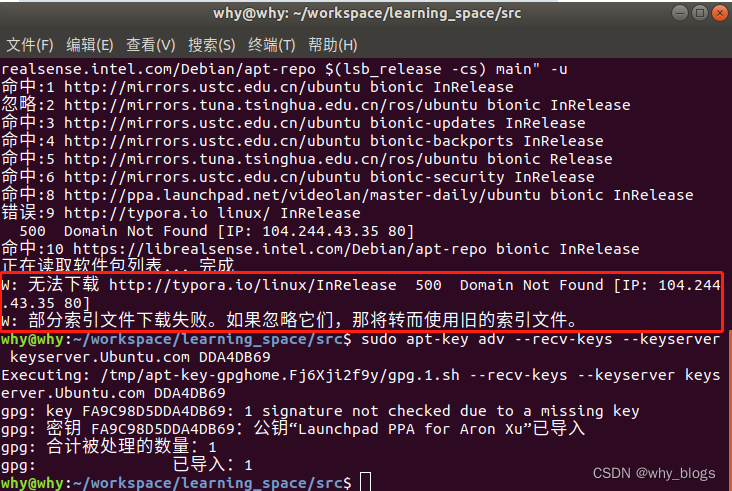
在使用sudo apt-get update时出现以下提示
检验数字签名时出错,此仓库未被更新,所以仍然使用此前的索引
无法下载 http://*****************
部分索引文件下载失败,如果忽略他们,将转而使用旧的索引目录。
解决方法:随便打开一个终端,输入下面命令: sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
删除冲突的发行版:https://typora.io:443 linux/ InRelease (期望 linux/ 但得到 )
sudo vi /etc/apt/sources.list (打开sources.list) 将提示冲突的给删除掉 然后按shift+: 输入wq退出保存
无法定位软件包:直接换源可解决大部分问题
问题五
使用VM_ware 时,虚拟机无法与windows之间复制粘贴文件(安装增强工具也不行)
解决方法:
sudo apt-get update
• sudo apt-get install open-vm-tools-desktop fuse
• 重启
问题六
如何使用QGC使电机反转
在QGC进入控制台,输入:(1) dshot reverse -m 电机的序列号 (2)dshot save -m 电机的序列号
如:dshot reverse -m 1 (代表1号电机与现在旋转方向反向)
问题七
ubuntu安装.deb文件时使用命令行:sudo dpkg -i + 文件包名.deb
问题八
u盘启动Ubuntu失败解决办法
在ubuntu安装NVIDIA驱动后,重启电脑后卡在“starting Gnome Display Manager”界面。

解决方案:
参考(40条消息) 解决ubuntu18.04卡在“starting Gnome Display Manager“_环氧的博客-CSDN博客
问题九
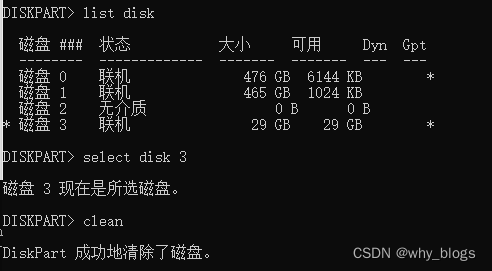
在windows系统下使用命令行对某个磁盘进行删除
操作步骤:
1、打开cmd
2、打开磁盘diskpart
3、打开磁盘列表
list disk
4、选择磁盘select disk 2
5、清除磁盘 clean
问题十:线序无人机连接
PX4接口图


Pm07-v2.3分电板接口图(蓝色三角形焊接电调负极,√接正极)


在接线的顺序
- 分电板15号(电调信号输入)接PX4 17号(电调信号输出)
- 分电板13号接电调信号线
- 分电板12号(pwr1)接PX4 POWER1
- PX4 12号(DSM/SBUS信号)与遥控接收机连接。
- PX4 5号(TELEM2)与树莓派或者英伟达机载电脑连接
- 各个参数的设置:
CBRK_IO_SAFETY = 22027
CBRK_USB_CHK = 197848
MAV_1_CONFIG = TELEM 2
SYS_USE_IO = 0 (这条可能无法设置)
DSHOT_CONFIG = DShot600
当电机转向与预期方向不一致时,进入Mavlink Console 7.根据反转电机编号,依次输入指令,以1号电机反转了为例
dshot reverse -m 1
dshot save -m 1
设置mavlink 频率:
法一:在sd卡中创建文件夹etc->extras.txt
在txt文件写:mavlink stream -d /dev/ttyACM0 -s ATTITUDE_QUATERNION -r 200
mavlink stream -d /dev/ttyACM0 -s HIGHRES_IMU -r 200
法二:在ros 输入:rosrun mavros mavcmd long 511 105 5000 0 0 0 0 0
其中5000代表5000微秒即0.005s、200Hz。
转换公式:f = 1/T (f:频率 hz T:周期 s);如f = 50 则T=0.02
1s = 1000ms = 1000 000us
问题十一
win 10 下方任务栏经常卡死不动解决方案(我使用方法2、3、4)(第一篇博客),最终是通过禁用咨询和兴趣解决(参考第二篇博客)。
(45条消息) Win10任务栏卡死,无响应,点不动解决方法集锦_张俊杰1994的博客-CSDN博客_任务栏卡死
如何彻底关闭Windows10的“资讯和兴趣”功能 - 知乎 (zhihu.com)
问题十二
安装显卡驱动
1、查看当前是否安装Nvidia驱动
nvidia-smi
2、若存在驱动,卸载当前驱动
sudo apt-get remove --purge nvidia*
3、更新
sudo apt-get update
4、查看自己电脑支持哪种型号的驱动
sudo ubuntu-drivers devices
5、选择合适的驱动进行安装(当需要做深度学习时需要将驱动与cuda对应起来)
sudo apt install nvidia-driver-510-server
6、等待安装完成,重启,再通过nvidia-smi查看驱动是否安装成功。
问题十三
使用matlab求解参数矩阵
求解如下问题:


问题十四
matlab 如何查找一个小矩阵中某一行在位于另一个大矩阵的第几行?
小矩阵:A = [1 2 3;4 5 6;7 8 9]
大矩阵:B = [ 1 1 2; 1
2 1 0 ; 2
1 2 3; 3
5 4 2; 4
4 5 6; 5
7 8 9 ] 6
代码:
A;
B;
record_index = [];
for i = 1 : length(A)
RowIndex = find(ismember(B,A(i,:),'rows'));//查询A矩阵第i行的参数在B矩阵的哪一行
record_index = [ record_index ; RowIndex ];//将对应的索引全部保存下来
end
问题十五
matlab 删除矩阵中某几行或者某几列
A = [ 1 1 2; 1
2 1 0 ; 2
1 2 3; 3
5 4 2; 4
4 5 6; 5
7 8 9 ] 6
b = A;
b((2:4),:)%删除2-4行数值
b(:,(1:2))%删除1-2列数值
问题十六
磁盘被写保护

解除方法:
1、同时按住win+R打开运行对话框。
2、输入diskpart并按回车键
3、输入list disk
4、select disk n (n为盘符)
5、attributes disk clear readonly
显示“已成功清除磁盘属性”,说明成功解除只读属性。
在解除只读属性后,点击文件夹显示需要权限,无法显示当前所有者。
解决方法:回到盘符页面,右击属性,将共享设置为所有共享式,所有者的权限设置为完全控制。

问题十六

问题十七

在编译工作空间时出现 : The specified base path "/home/why/workspace/learning" contains a CMakeLists.txt but "catkin_make" must be invoked in the root of workspace 时,原因:上一步初始化工作空间时本应该在src文件夹里,但是却在src的上级目录初始化的。导致CMakeLists.txt和package.xml被放到src的上级目录中了; 处理办法 : 将CMakeLists.txt和package.xml删除,在src文件夹中重新初始化工作空间。
问题十八
范数问题小结
在编写一个 数值优化的matlab 代码时,遇到一个范数问题,查阅一些书籍与资料,以下是自我的一些见解。
参考资料:范数(norm),什么是范数,如何理解他的作用(转) - Light_chen - 博客园 (cnblogs.com)
范数定义:称从一个向量空间  到实数域的非负函数 || . || 为范数 ,满足:
到实数域的非负函数 || . || 为范数 ,满足:
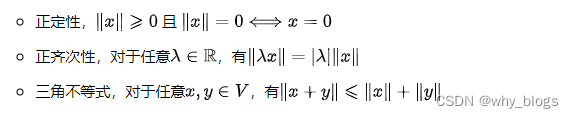
范数求解公式:
o 范数:求解向量中非零元素的个数
1 范数: 求解向量中绝对值之和
2 范数: 求解通常意义上的模
无穷范数 : 求向量中的最大值。通俗来讲,对通才求二范数时值比较大;对专才求无穷范数时,值较大。
问题十九
Ubuntu 遇到无法获得锁

解决方法一:查找正在运行的进程并关闭
ps -e|grep apt-get
或者ps -e|grep apt
sudo kill 6615(进程编号)
法二:强制解锁
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock
或者
sudo rm /var/lib/dpkg/lock-frontend
sudo rm /var/lib/dpkg/lock
最后
sudo apt-get update
问题二十
在安装软件或者载卸软件时出现无效盘符

解决办法:
随便找一个空U盘,将U盘的盘符改为所缺失的盘符,如此处改为F,然后再次点击删除或者安装即可。
问题二十一

问题二十二
使用VMwre时,虚拟机右下角的NET显示正常,但是无法连接网络,在网上搜索多种解决办法依然无法解决该问题,后来发现在此电脑 >> 管理 >> 服务 >> VM相关的程序进行重启 即可解决。


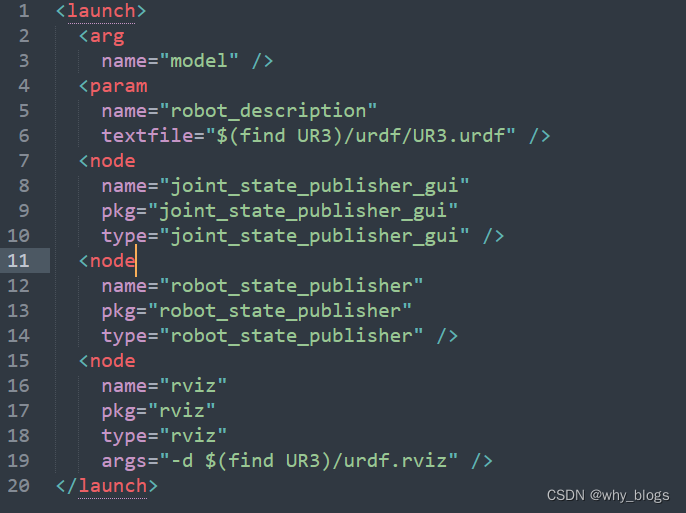
问题二十三
使用RVIZ启动一个URDF文件时,显示 RobotModel 错误,主要是一些关节错误。
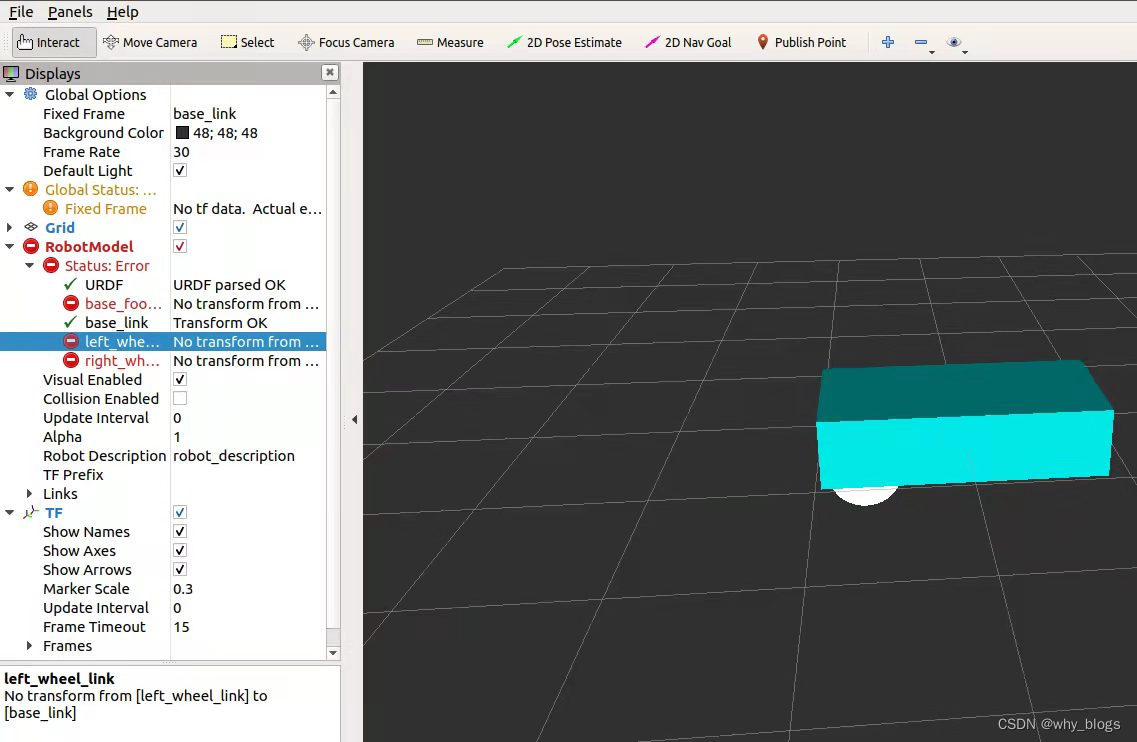
错误原因:在 launch 文件中未使用关节状态发布器 joint_state_publisher_gui robot_state_publisher ,安装这些发布器,然后写入 launch 文件中,如下图所示。
问题二十四
在启动gazebo时,出现如下错误
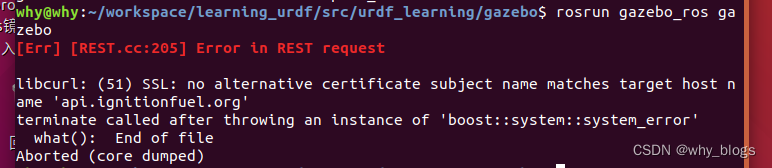
解决方法:
sudo gedit ~/.ignition/fuel/config.yaml
注释 url: https://api.ignitionfuel.org 注释方法:在这一行最前面添加#
然后添加 url: https://api.ignitionrobotics.org
在启动gazebo即可。
问题二十五
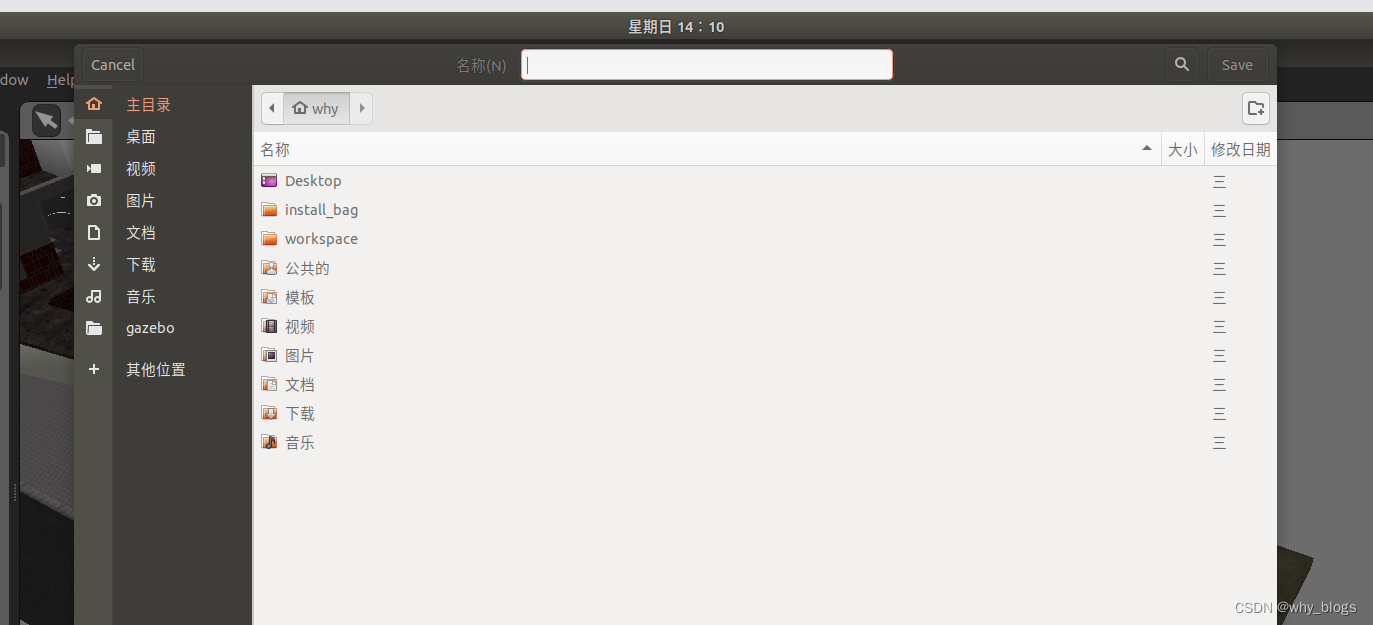
melodic版本在保存Gazebo中的环境时,无法显示想要保存的路径,需要将gazebo最小化一下,然后保存路径的窗口才会弹出。
问题二十六
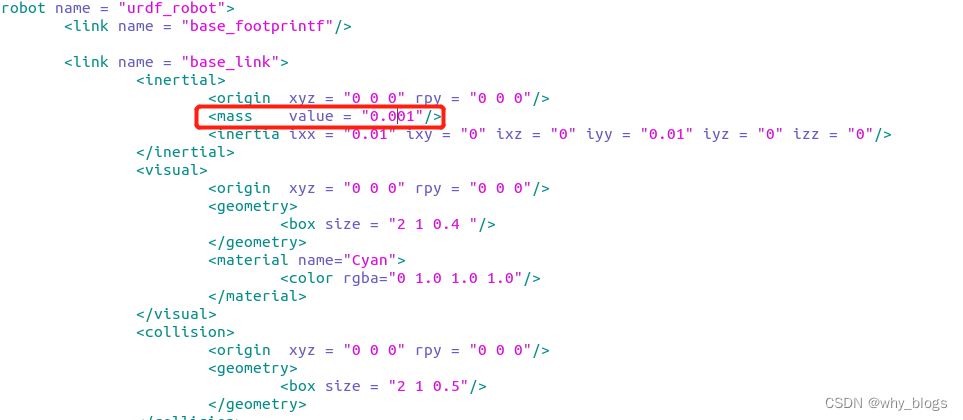
gazebo 中模型东倒西歪
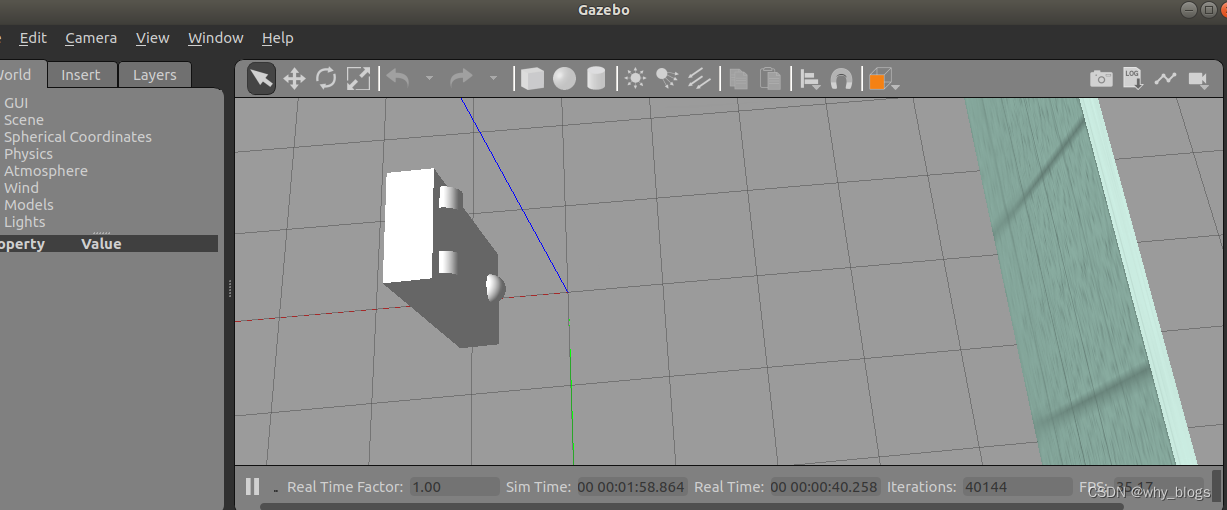
是因为模型的质量mass设置的太大了,将masss设置小一点
问题二十七
移动硬盘在打开文件夹时无法正常打开,右击属性,发现为只读状态。
设置方式:
1、win + R ,输入cmd ;
2、输入diskpart ;
3、list disk
4、select disk 2
5、执行attributes disk 命令查看基本的磁盘属性
6、清除只读属性 : attributes disk clear readonly
问题二十八

感觉是因为python 版本问题,目前不知道什么原因,故选择简单粗暴地方法, sudo apt --fix-broken install 直接修复依赖问题。
问题二十九
创建一个新的工作空间时,使用catkin_make命令时,一直显示如下错误,查阅资料说是ptyhon版本问题,但是卸载重装后依旧不行,还有部分大佬说是src文件下的CMake文件错误,需要将该文件删除,并重新建立一个新文件,将/opt/ros/melodic/share/catkin/cmake目录下的toplevel.cmake内容复制到camkelists.txt文件中,发现依旧不行。最终在一篇博客发现需要卸载ros,重装即可。经过尝试后发现确实可行。

附卸载代码:
sudo apt-get purge ros-*
sudo rm -rf /etc/ros
gedit ~/.bashrc
找到:带有melodic的那一行删除,保存,然后:
source ~/.bashrc
安装ros-melodic
参考ros wiki和古月居的ros 21讲进行安装
1、
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2、
sudo apt install curl # if you haven't already installed curl
3、
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
4、
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
5、sudo apt update
6、sudo apt install ros-melodic-desktop-full
7、apt search ros-melodic
8、echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
9、source ~/.bashrc
10、sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
11、sudo apt install python-rosdep
12、sudo rosdep init
13、rosdep update
若失败
#打开hosts文件
sudo gedit /etc/hosts
#在文件末尾添加
151.101.84.133 raw.githubusercontent.com
#保存后退出再尝试
安装完成后再使用catkin_make成功

问题30
在使用Git clone 时发现下载速度一直为10kb甚至更加龟速,后面发现该博客方法确实有效,链接如下:linux系统github全局加速_ace1231的博客-CSDN博客_linux github加速
问题31
公司里的电脑想要上网,需要我电脑的物理地址,发给他们之后返回给我 IP 掩码 网关 DNS ,在自行配置后可以上网,但是将另一台笔记本插上网线后,按照正常配置却无法上网使用诊断后出现以下错误:
通过不断摸索,发现是每台电脑的物理地址不一样,所以单纯修改 IP 掩码 网关 DNS 后依旧无法上网,因此需要修改新电脑的物理地址。在修改物理地址后的确解决该问题,现将修改方法附上:
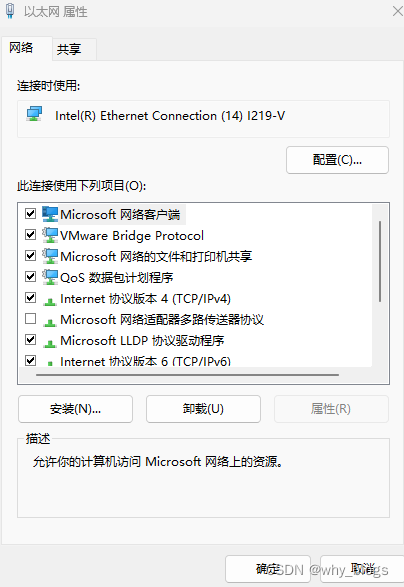
1、控制面板 -- 网络和internet -- 网络和共享中心 -- 更改适配器设置
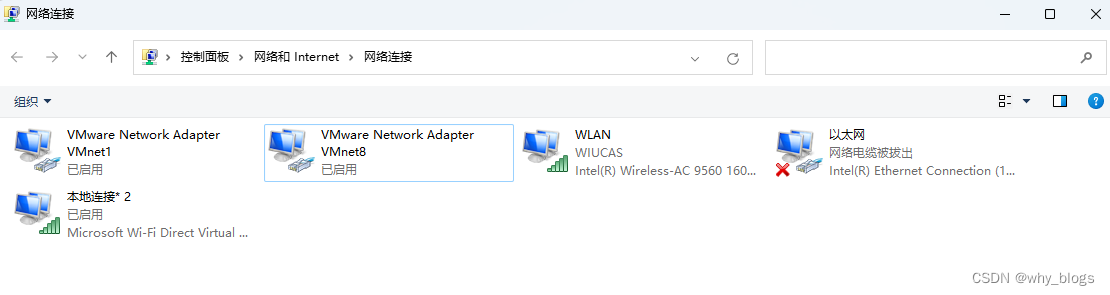
2、右击以太网 -- 属性 -- 配置 -- 高级 -- 本地管理的地址(locally Administered Address)-- 输入前面提供给别人的物理地址并配置IP 掩码 网关 DNS即可上网。

问题32
想要通过T265相机获取位姿信息,因此安装T265驱动代码,单安装时一直显示如下报错:

最后发现在软件更新处进行修改可解决。在更新处选择前两个

在其他软件处把所有取消勾选即可

问题33
使用QGC配置飞控,传感器校准之后,使用QGC控制能让电机旋转,但遥控不行,报错如下:

本以为是校准的问题,后发现是因为GPS箭头方向需要与飞控的方向保持一致。
问题34
这几天想要在U盘里的noetic重新复现一下realsense的demo,但是在安装一些包的时候出现以下报错:

最终查到报错的原因可能是系统启用了UEFI安全启动,而librealsense2-dkms是一个需要签名的内核模块。以下是解决的方法(我采用的是方法二和三):
方法一:安装需要的DKMS包。安装过程中,系统会提示你创建一个新的机器所有者密钥(MOK),并引导你在系统固件中注册这个密钥。
方法二:在shim-signed中禁用安全启动。打开终端,执行sudo mokutil --disable-validation。输入一个8到16位的临时密码(例如,12345678)。再次输入相同的密码进行确认。重启系统,当你看到蓝色屏幕(MOK管理)时按任意键。选择Change Secure Boot state。输入你之前选择的密码并按回车。选择Yes来禁用shim-signed中的安全启动。按回车键完成整个过程。
方法三:从BIOS中禁用安全启动。进入BIOS设置。禁用安全启动。保存配置。重启系统。
方法四:手动签名模块。你也可以选择自己签名模块。为了简单起见,你可以使用命令:sudo update-secureboot-policy --new-key 来创建一个新的MOK密钥用于签名,然后运行适当的kmodsign命令来签名你的内核模块。在模块签名后,运行sudo update-secureboot-policy --enroll-key 来进行注册向导,或者自己运行sudo mokutil --import <your key>来注册。
问题35
使用source ubuntu.sh 命令出现闪退,可使用bash ubuntu.sh重新运行。
问题36
在使用vm虚拟机的时候,偶尔会出现网络图标消失,导致无法上网的行为。为此记录一下解决方案:(即重启一下网络管理器)
sudo service network-manager stop
sudo rm /var/lib/NetworkManager/NetworkManager.state
sudo service network-manager start
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)