一、参考博客
- RealSense D435内参获取环境配置:Realsense D435i 在ubuntu上安装SDK与ROS Wrapper 运行ORB-SLAM2、RTAB和VINS-Mono
- 内参数字含义解析:添加链接描述
二、小贴士
2.1 遇到的问题及解决方案
问题一描述
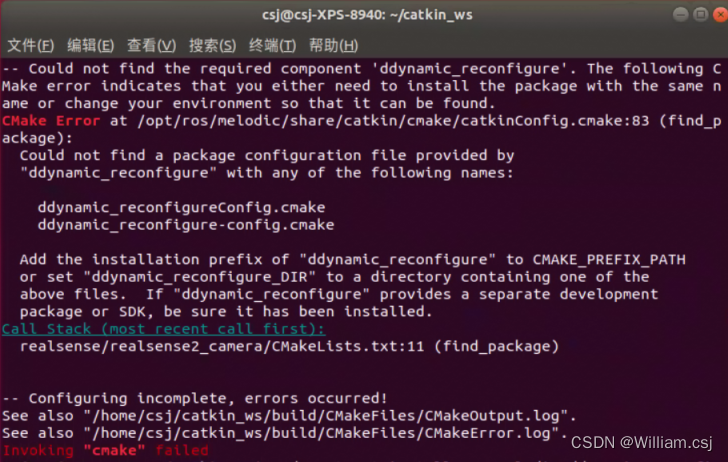
– Could not find the required component ‘ddynamic_reconfigure’. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
“ddynamic_reconfigure” with any of the following names:
ddynamic_reconfigureConfig.cmake
ddynamic_reconfigure-config.cmake
Add the installation prefix of “ddynamic_reconfigure” to CMAKE_PREFIX_PATH
or set “ddynamic_reconfigure_DIR” to a directory containing one of the
above files. If “ddynamic_reconfigure” provides a separate development
package or SDK, be sure it has been installed.
Call Stack (most recent call first):
realsense/realsense2_camera/CMakeLists.txt:11 (find_package)
– Configuring incomplete, errors occurred!
See also “/home/csj/catkin_ws/build/CMakeFiles/CMakeOutput.log”.
See also “/home/csj/catkin_ws/build/CMakeFiles/CMakeError.log”.
Invoking “cmake” failed
问题一解决方法
sudo apt-get install ros-melodic-ddynamic-reconfigure
问题二描述
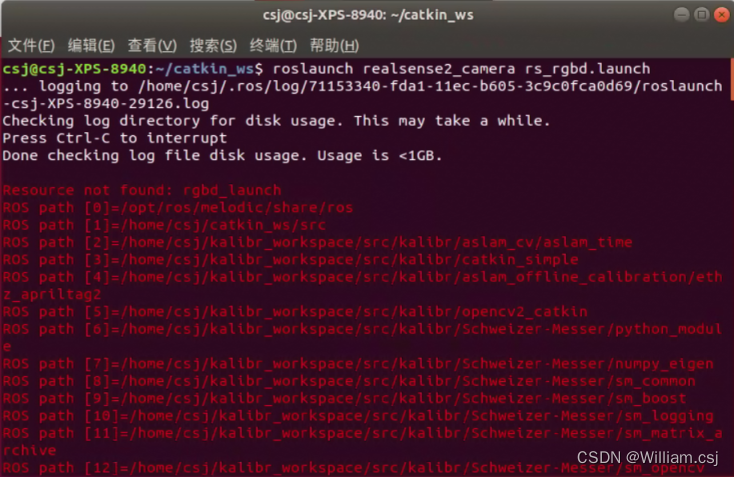
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
Resource not found: rgbd_launch
ROS path [0]=/opt/ros/melodic/share/ros
ROS path [1]=/home/csj/catkin_ws/src
ROS path [2]=/home/csj/kalibr_workspace/src/kalibr/aslam_cv/aslam_time
ROS path [3]=/home/csj/kalibr_workspace/src/kalibr/catkin_simple
ROS path [4]=/home/csj/kalibr_workspace/src/kalibr/aslam_offline_calibration/ethz_apriltag2
问题二解决方法
sudo apt-get install ros-melodic-rgbd-launch
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)