从去年开了这个博客起就一直没有写过,好在今天实验有了一些小进展,所以想分享给大家。首先讲讲我做了些什么吧。我想做一个基于单目视觉的四旋翼定点降落,能够让四旋翼从任意位置起飞之后,完全自主地降落到地面标志处。国内外有许多实验室都已经完成了这个功能,在IEEE、中国知网上也有不少论文,但基本没有人系统地写过相关中文博客。所以,我想把自己的体验分享出来,供大家交流与参考。废话不说,先上图。
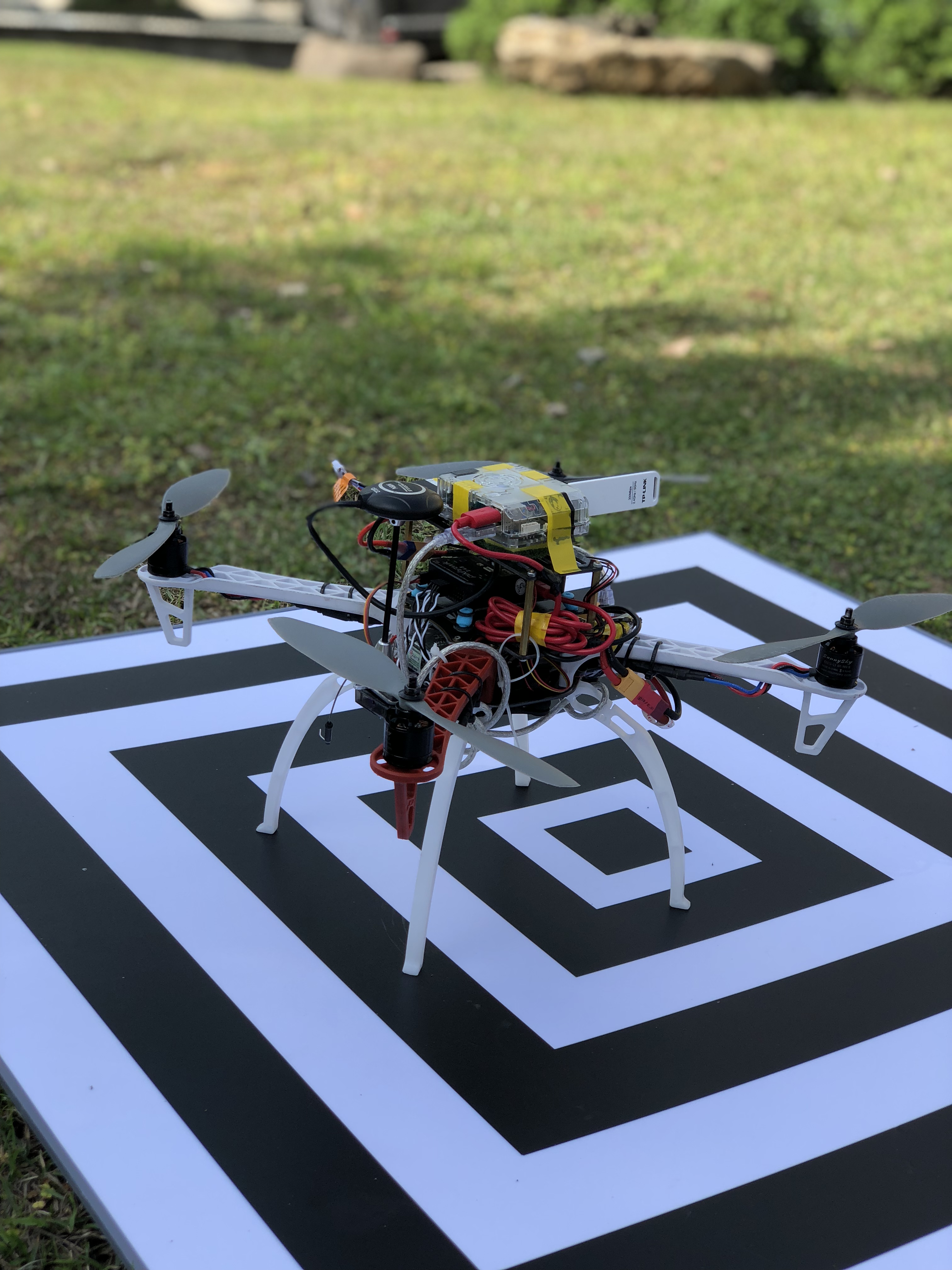
以pixhawk作为飞控,odroid XU4作为图像处理上位机,摄像头用了全局快门的MT9V034(屌丝买不起贵的),地标用Apriltag也可以。但我想自己体验一下整个过程,就自主设计了一个回形地标,效果还行。由于整个系统内容太多,一篇两篇文章也讲不清楚,而且我也没有整块的时间来写(导师疯狂push项目),所以打算写个系列,慢慢写。初步拟了一个框架,以后慢慢更:
(一)概述(就是这篇)
(二)如何通过mavros控制pixhawk
(三)如何搭建基于gazebo的pixhawk仿真环境(不先仿真,肯定炸鸡一百次啊)
(四)地标的设计与识别算法
(五)位姿估算与控制算法
测试视频今天就不传上来了,一来还没剪辑好(博主不想露脸,哈哈哈),二来也是留个悬念,最后一章会传上去。希望大家能够持续关注,有问题也可以随时和博主交流。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)