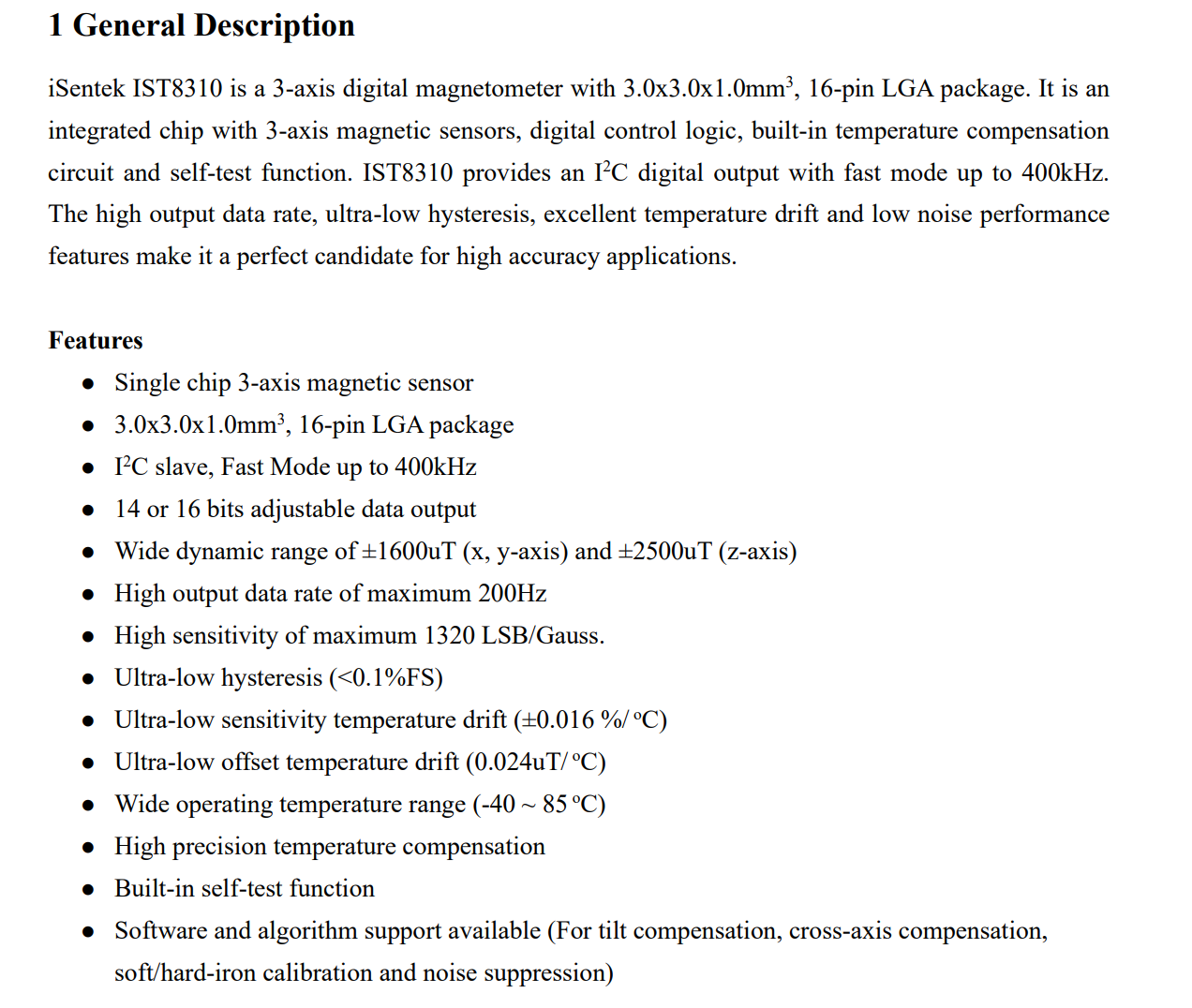
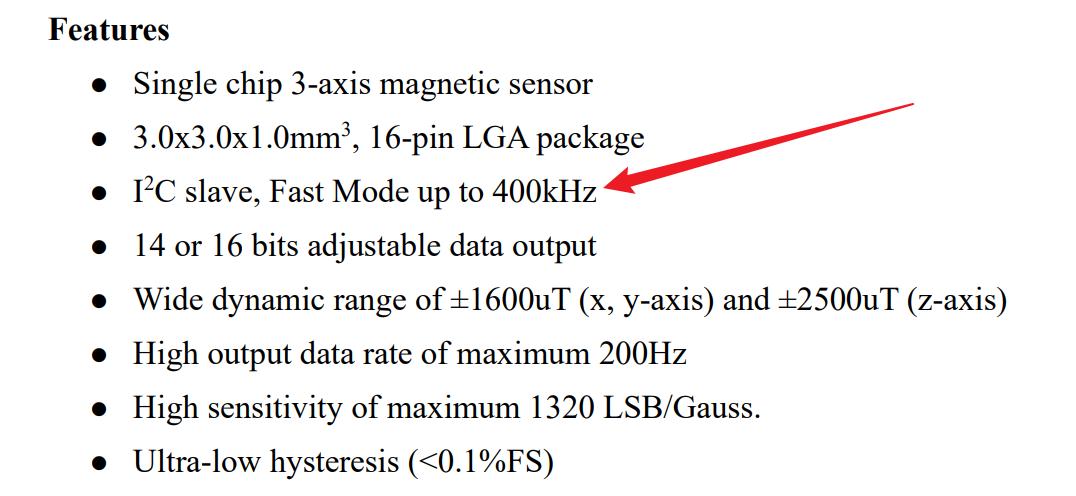
这里以iSentek公司产出的IST8310型号的磁力计为例,尺寸为 3.0 * 3.0 * 1.0mm,支持快速 I2C 通信,可达 400kHz,14 位磁场数据,测量范围可达1600uT(x,y-axis)和 2500uT(z-axis), 最高 200Hz 输出频率
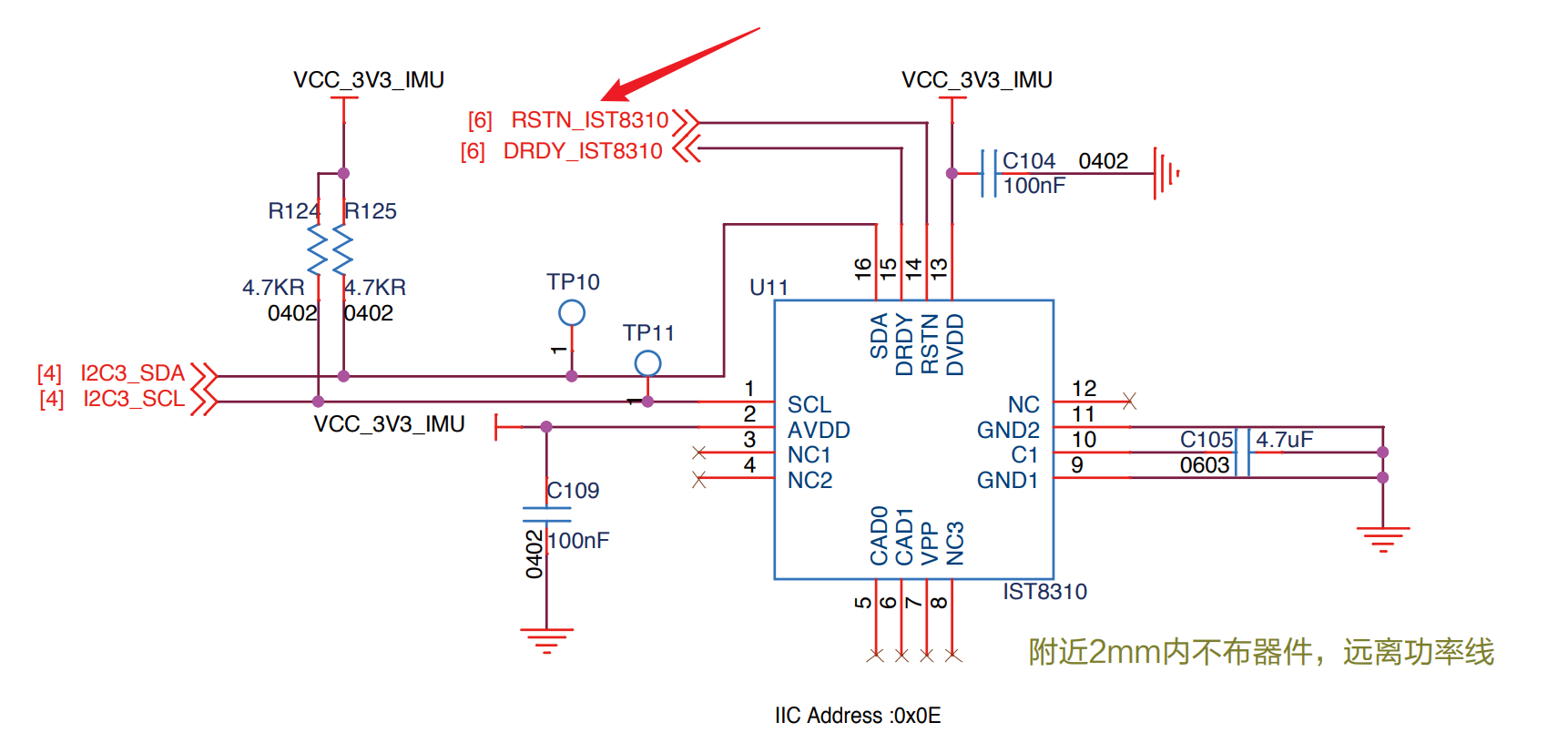
同时这里的磁力计是安装在大疆公司出产的RoboMaster开发板C型,单片机芯片是STM32F407IGH6,其外围电路已经设计好,只需要读取磁力计数据即可。
本篇不会介绍SPI、I2C等嵌入式通信协议,需要有一定嵌入式开发基础的同学来看
文末附代码
零、数据手册分析
第一章讲了IST8310的特性,I2C通信,最高支持400kHz通信速率,14位或者16位自适应数据输出等特性
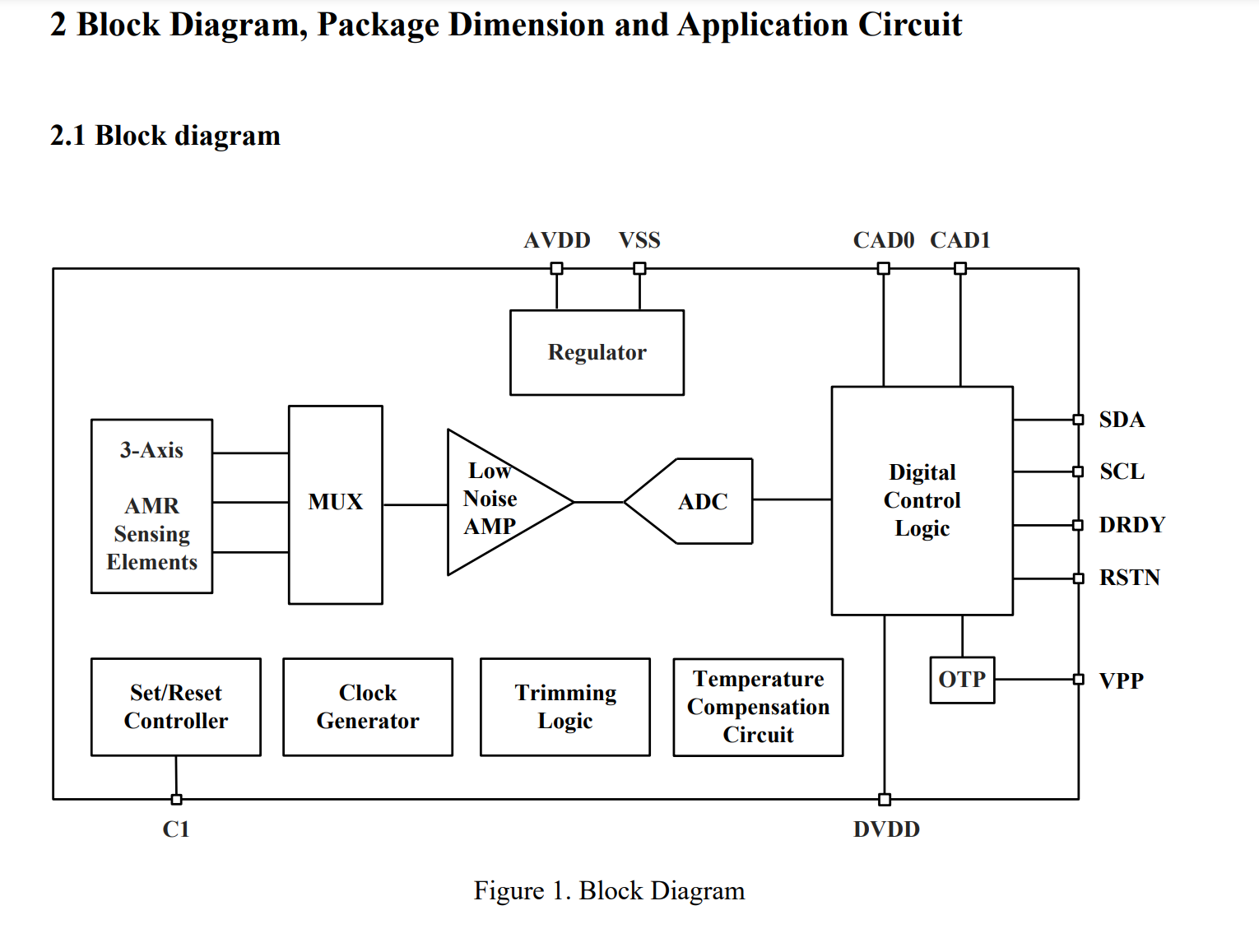
第二章讲了内部结构
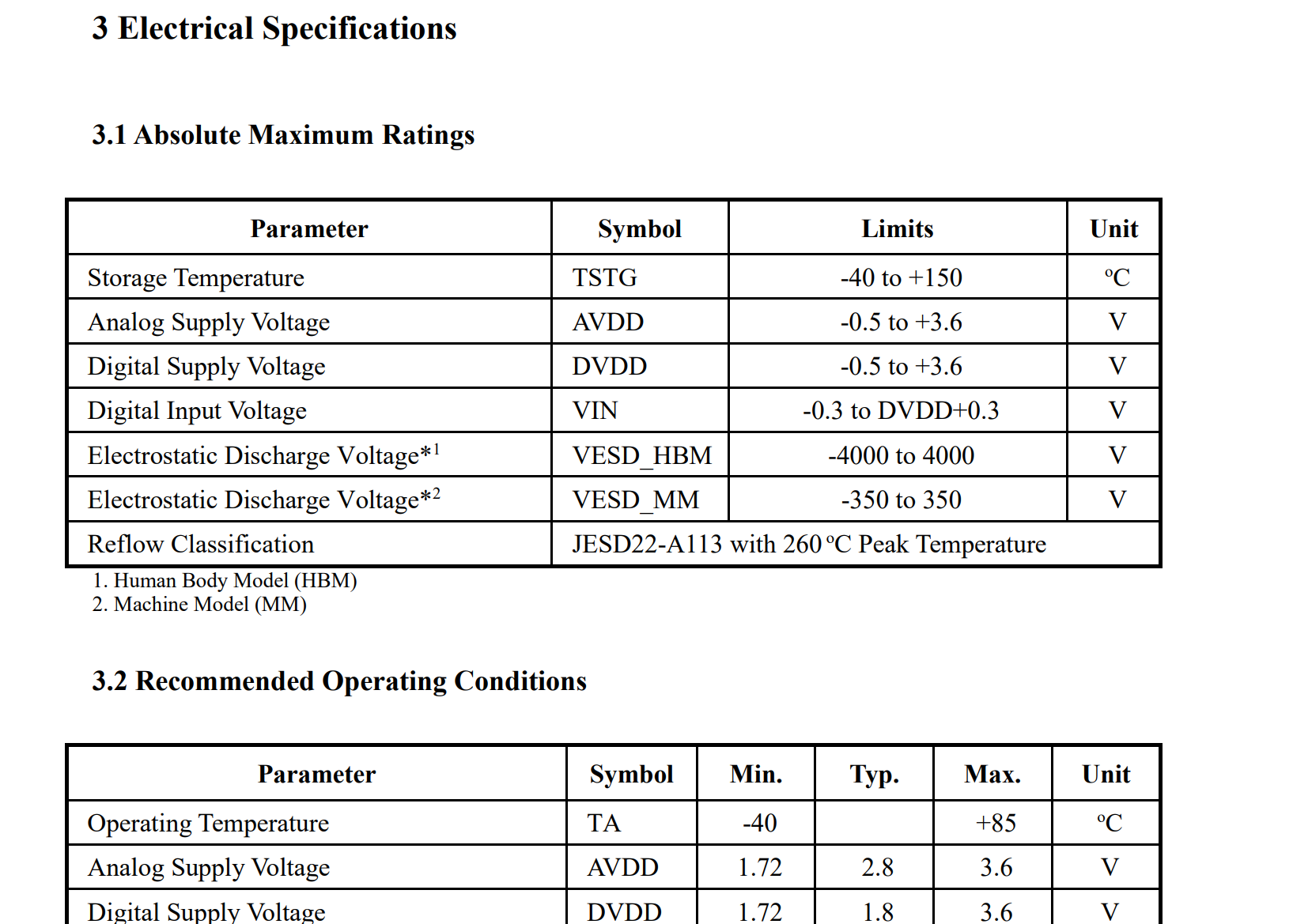
第三章讲了电气特性
第四章讲了如何联系他们
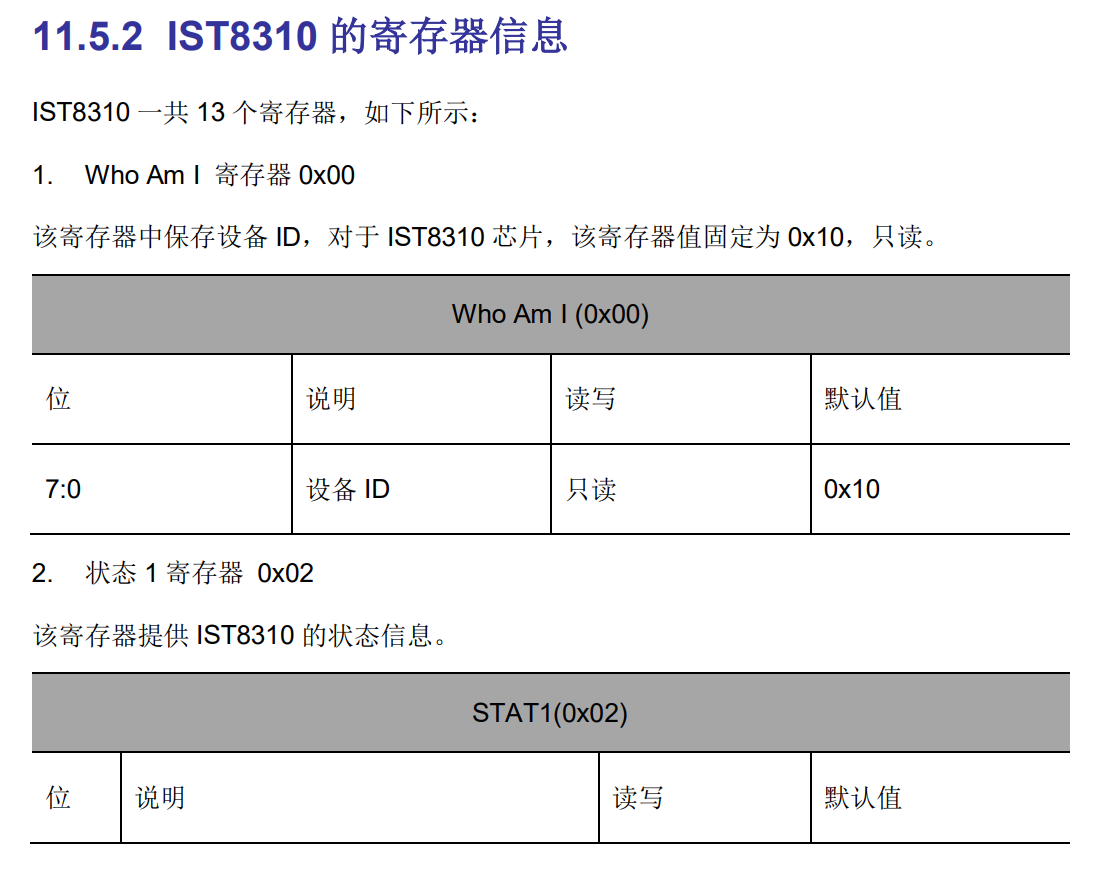
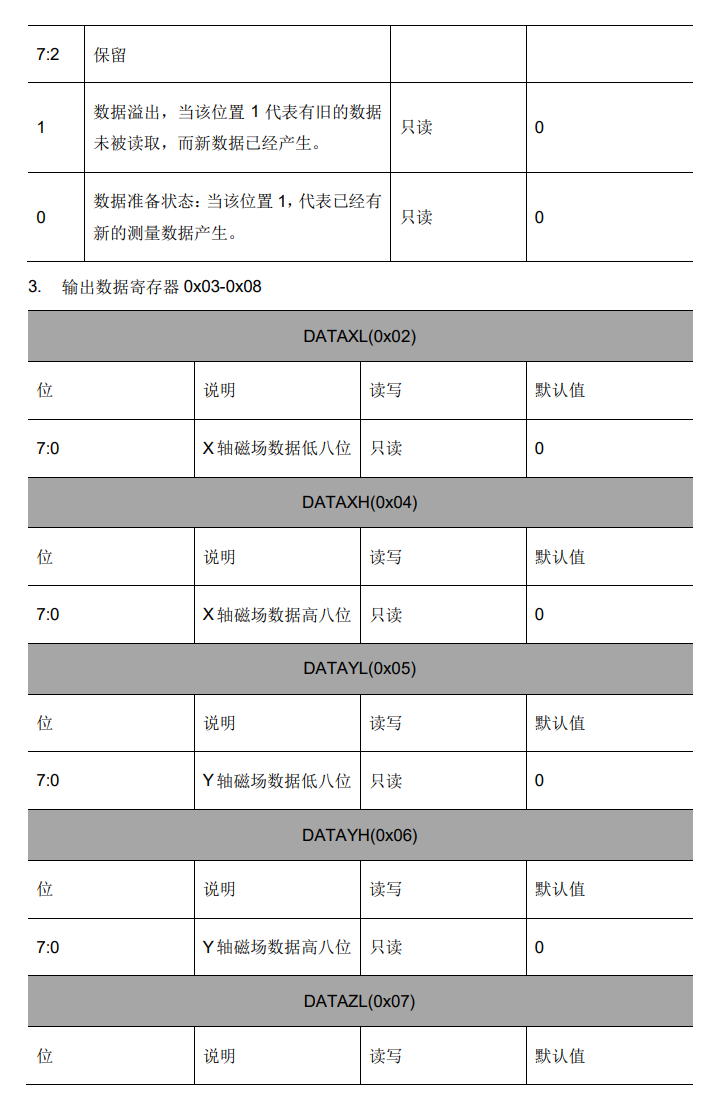
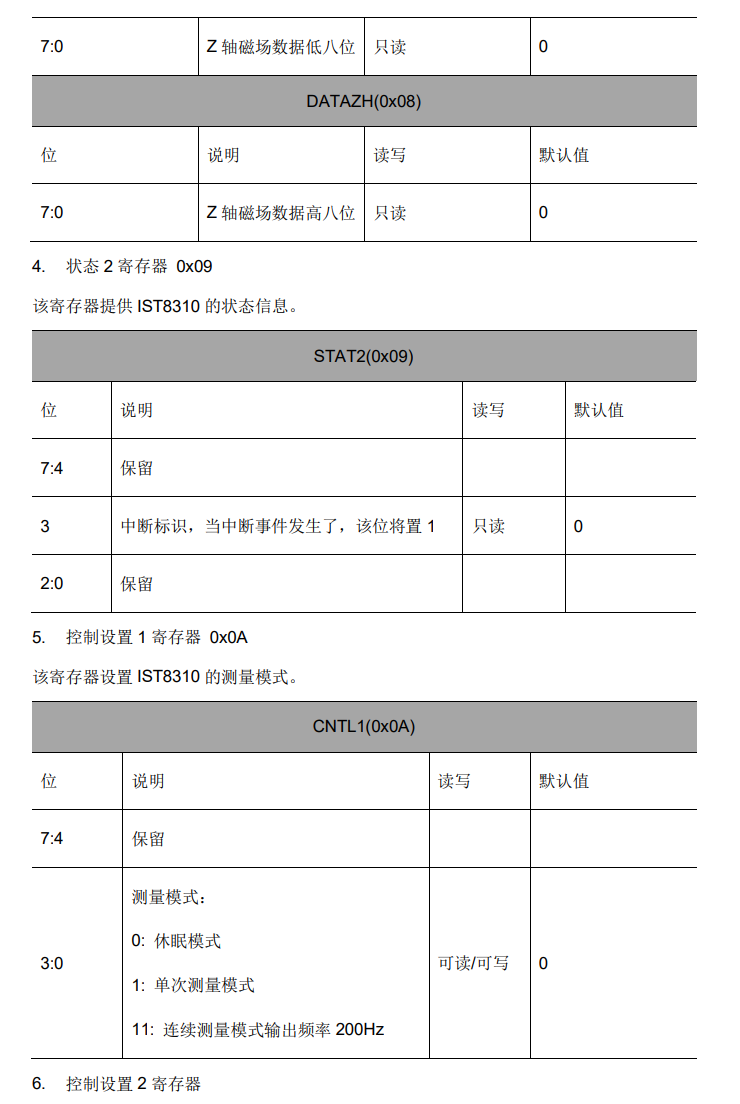
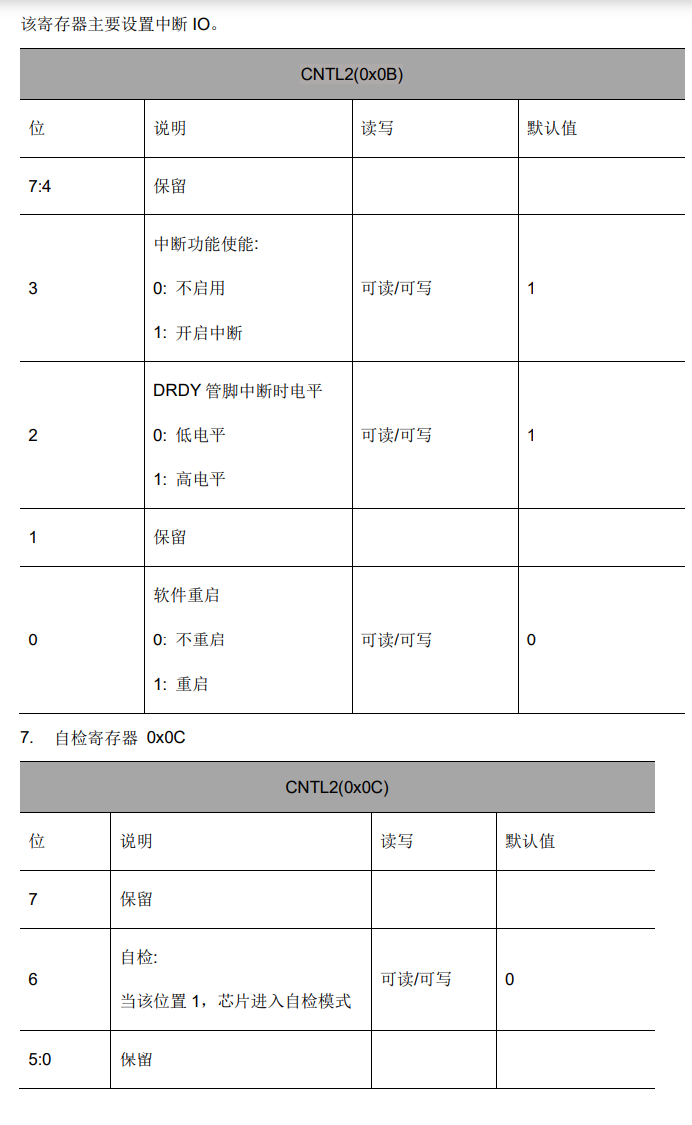
然后数据手册就没了。。。在大疆的开发手册中找到了寄存器的手册,如下:
一、CubeMX配置
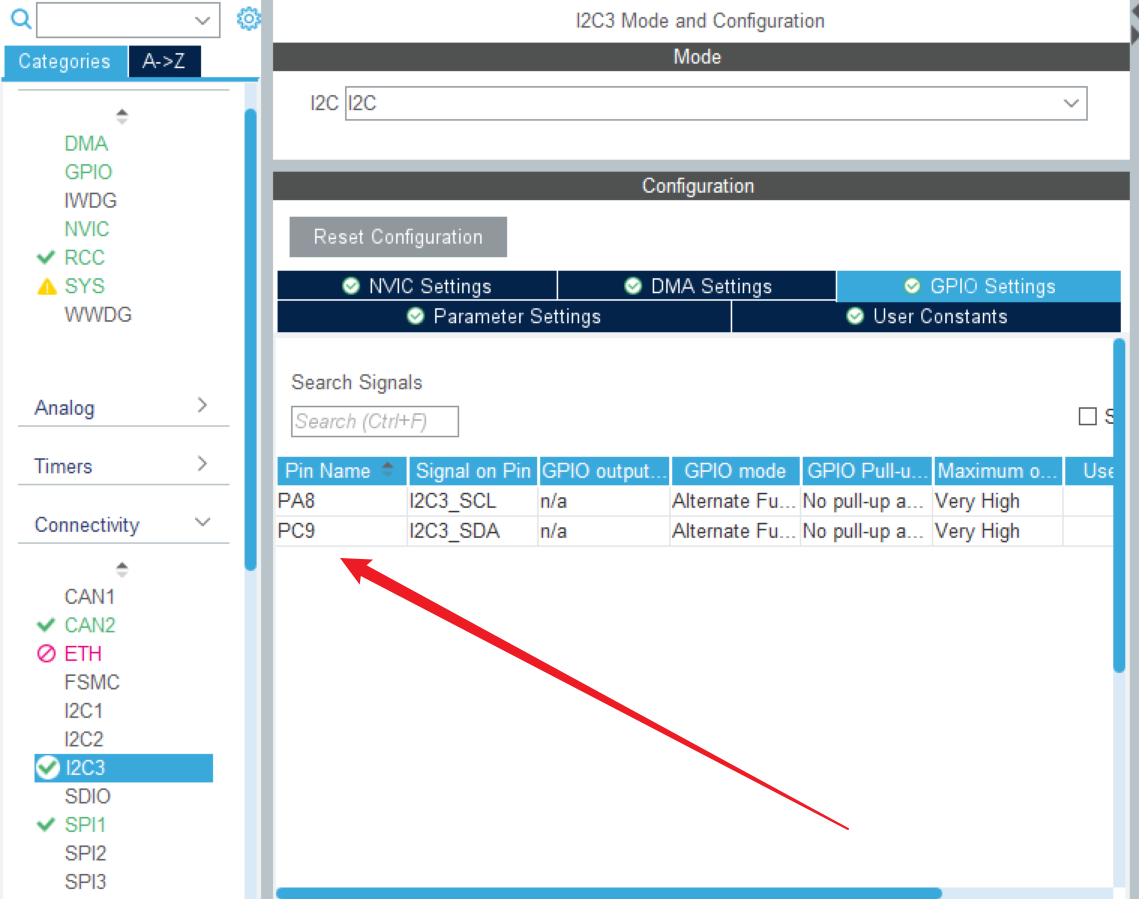
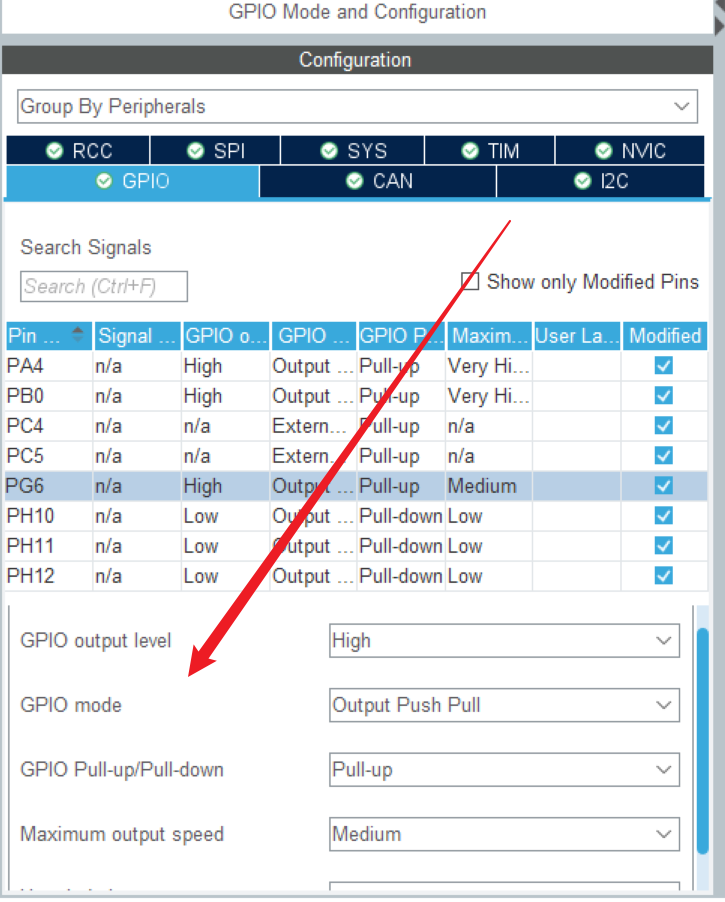
点开I2C配置选项, 下图是配好的:
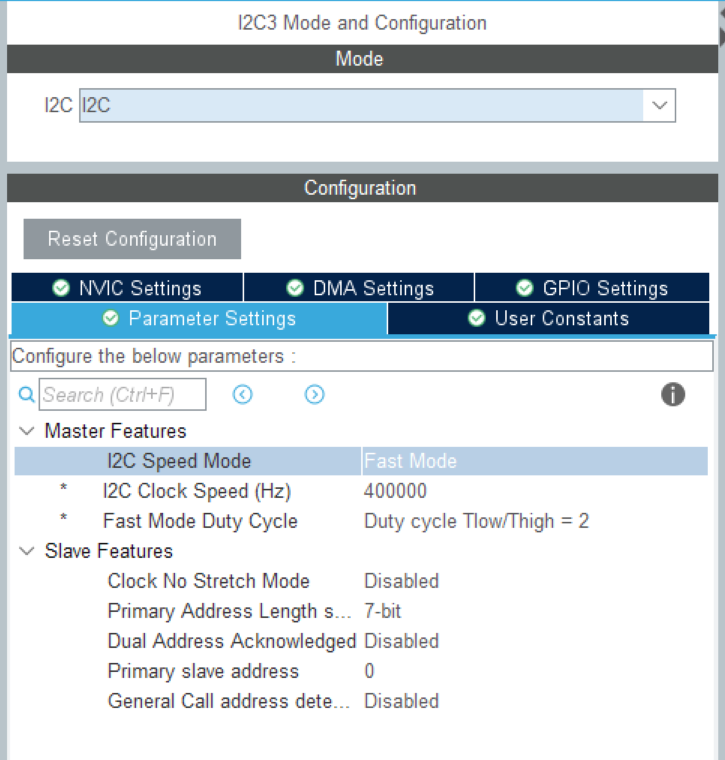
观察IST8310的数据手册,发现其支持最大400kHz的I2C通信速率,也就是快速I2C模式,所以第一行I2C Speed Mode我们选Fast Mode
同时不要忘记了在C板中I2C3的两个IO口分别是PA8和PC9(一般来说都是这两个)
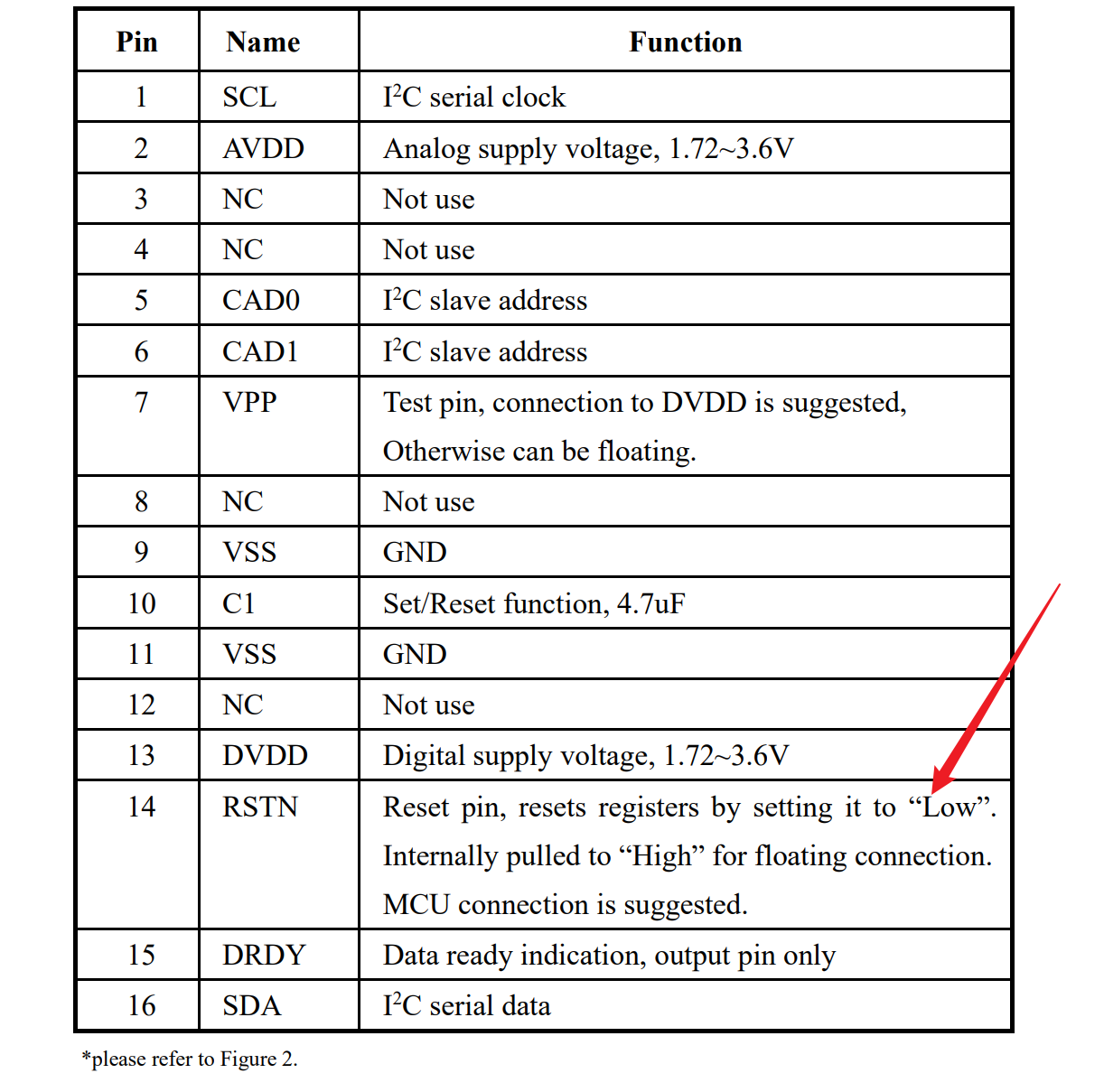
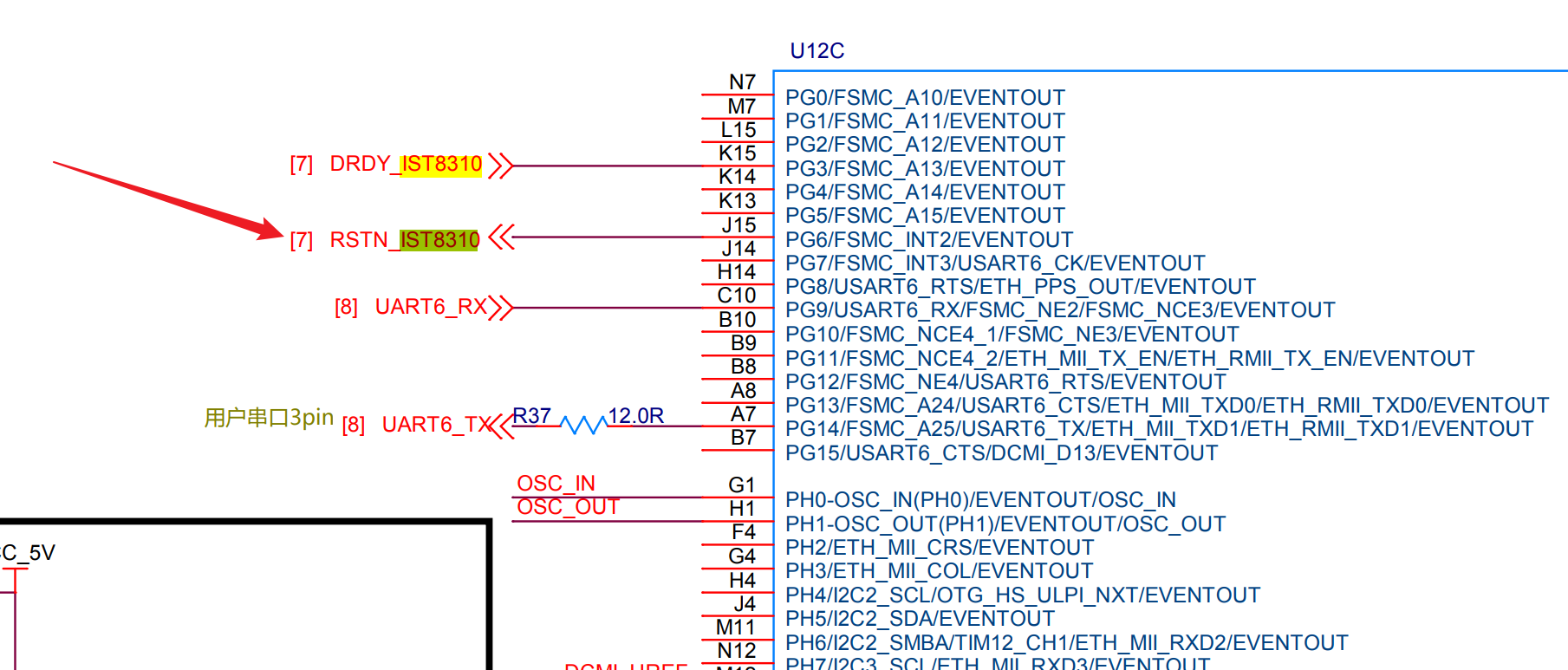
之后观察大疆和IST8310的数据手册,发现控制IST8310重启的是PG6的GPIO口,低电平为重启,所以我们将其设置为高电平上拉输出模式
因为我们读取IST8310的程序运行在1kHz的freertos线程中,无需使用中断方式,所以我们不配置中断口
二、数据读取
总代码附在文末,这里放一些核心函数
IST8310初始化:
void IST8310_INIT(ist8310_data_t* ist8310_data) {
memset(ist8310_data, 0, sizeof(ist8310_data_t));
ist8310_data->meg_error = IST8310_NO_ERROR;
// 把磁力计重启
HAL_GPIO_WritePin(IST8310_GPIOx, IST8310_GPIOp, GPIO_PIN_RESET);
HAL_Delay(50);
HAL_GPIO_WritePin(IST8310_GPIOx, IST8310_GPIOp, GPIO_PIN_SET);
HAL_Delay(50);
// 基础配置
// 不使能中断,直接读取
WriteSingleDataFromIST8310(IST8310_CNTL2_ADDR, IST8310_STAT2_NONE_ALL);
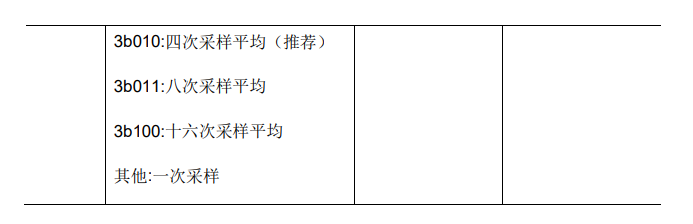
// 平均采样四次
WriteSingleDataFromIST8310(IST8310_AVGCNTL_ADDR, IST8310_AVGCNTL_FOURTH);
// 200Hz的输出频率
WriteSingleDataFromIST8310(IST8310_CNTL1_ADDR, IST8310_CNTL1_CONTINUE);
ist8310_data->meg_error |= VerifyMegId(&ist8310_data->chip_id);
}
读取单个数据:
uint8_t ReadSingleDataFromIST8310(uint8_t addr) {
uint8_t data;
HAL_I2C_Mem_Read(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, &data, 1, 10);
return data;
}
读取多个数据:
void ReadMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len) {
HAL_I2C_Mem_Read(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, data, len, 10);
}
写入单个数据:
void WriteSingleDataFromIST8310(uint8_t addr, uint8_t data) {
HAL_I2C_Mem_Write(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, &data, 1, 10);
}
写入多个数据:
void WriteMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len) {
HAL_I2C_Mem_Write(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, data, len, 10);
}
这里会发现一个比较有意思的事情,就是这里的地址都左移了一位,是因为根据I2C协议,[7:0]的一个字节的数据,前七位是地址,后一位是代表读或者写的位,这样子就需要把地址左移
读取磁力计数据:
void ReadIST8310Data(ist8310_raw_data_t* meg_data) {
uint8_t buf[6];
int16_t temp_ist8310_data = 0;
ReadMultiDataFromIST8310(IST8310_DATA_XL_ADDR, buf, 6);
temp_ist8310_data = (int16_t)((buf[1] << 8) | buf[0]);
meg_data->x = MAG_SEN * temp_ist8310_data;
temp_ist8310_data = (int16_t)((buf[3] << 8) | buf[2]);
meg_data->y = MAG_SEN * temp_ist8310_data;
temp_ist8310_data = (int16_t)((buf[5] << 8) | buf[4]);
meg_data->z = MAG_SEN * temp_ist8310_data;
}
这里乘了一个系数MAG_SEN,它的值是0.3,是将读取到的数据转化为单位为uT的磁场值
下面就是源码,把IST8310_INIT()函数放在程序开始的地方,然后剩下的读取函数放在不断执行的线程里,就可以得到磁力计数据了
ist8310.c
/**
* @Author : Minghang Li
* @Date : 2022-12-03 14:29
* @LastEditTime : 2022-12-03 16:52
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#include "ist8310.h"
#include <string.h>
#include "i2c.h"
#include "ist8310reg.h"
void IST8310_INIT(ist8310_data_t* ist8310_data) {
memset(ist8310_data, 0, sizeof(ist8310_data_t));
ist8310_data->meg_error = IST8310_NO_ERROR;
// 把磁力计重启
HAL_GPIO_WritePin(IST8310_GPIOx, IST8310_GPIOp, GPIO_PIN_RESET);
HAL_Delay(50);
HAL_GPIO_WritePin(IST8310_GPIOx, IST8310_GPIOp, GPIO_PIN_SET);
HAL_Delay(50);
// 基础配置
// 不使能中断,直接读取
WriteSingleDataFromIST8310(IST8310_CNTL2_ADDR, IST8310_STAT2_NONE_ALL);
// 平均采样四次
WriteSingleDataFromIST8310(IST8310_AVGCNTL_ADDR, IST8310_AVGCNTL_FOURTH);
// 200Hz的输出频率
WriteSingleDataFromIST8310(IST8310_CNTL1_ADDR, IST8310_CNTL1_CONTINUE);
ist8310_data->meg_error |= VerifyMegId(&ist8310_data->chip_id);
}
uint8_t ReadSingleDataFromIST8310(uint8_t addr) {
uint8_t data;
HAL_I2C_Mem_Read(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, &data, 1, 10);
return data;
}
void WriteSingleDataFromIST8310(uint8_t addr, uint8_t data) {
HAL_I2C_Mem_Write(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, &data, 1, 10);
}
void ReadMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len) {
HAL_I2C_Mem_Read(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, data, len, 10);
}
void WriteMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len) {
HAL_I2C_Mem_Write(&IST8310_I2C, (IST8310_I2C_ADDR << 1), addr, I2C_MEMADD_SIZE_8BIT, data, len, 10);
}
void ReadIST8310Data(ist8310_raw_data_t* meg_data) {
uint8_t buf[6];
int16_t temp_ist8310_data = 0;
ReadMultiDataFromIST8310(IST8310_DATA_XL_ADDR, buf, 6);
temp_ist8310_data = (int16_t)((buf[1] << 8) | buf[0]);
meg_data->x = MAG_SEN * temp_ist8310_data;
temp_ist8310_data = (int16_t)((buf[3] << 8) | buf[2]);
meg_data->y = MAG_SEN * temp_ist8310_data;
temp_ist8310_data = (int16_t)((buf[5] << 8) | buf[4]);
meg_data->z = MAG_SEN * temp_ist8310_data;
}
ist8310_error_e VerifyMegId(uint8_t* id) {
*id = ReadSingleDataFromIST8310(IST8310_CHIP_ID_ADDR);
if (*id != IST8310_CHIP_ID_VAL) {
return MEG_ID_ERROR;
} else {
return IST8310_NO_ERROR;
}
}
ist8310.h
/**
* @Author : Minghang Li
* @Date : 2022-12-03 14:29
* @LastEditTime : 2022-12-03 16:49
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#pragma once
#include <stdint.h>
typedef struct ist8310_raw_data_t {
float x;
float y;
float z;
} ist8310_raw_data_t;
typedef enum ist8310_error_e {
IST8310_NO_ERROR = 0x00,
MEG_ID_ERROR = 0x01,
} ist8310_error_e;
typedef struct ist8310_data_t {
uint8_t chip_id;
ist8310_raw_data_t meg_data;
ist8310_error_e meg_error;
} ist8310_data_t;
/*-----整形向uT转换-----*/
#define MAG_SEN 0.3f
/*-----I2C接口定义-----*/
#define IST8310_I2C_ADDR 0x0E
#define IST8310_I2C hi2c3
/*-----GPIO口定义-----*/
#define IST8310_GPIOx GPIOG
#define IST8310_GPIOp GPIO_PIN_6
void IST8310_INIT(ist8310_data_t* ist8310_data);
// 基础读取函数
uint8_t ReadSingleDataFromIST8310(uint8_t addr);
void WriteSingleDataFromIST8310(uint8_t addr, uint8_t data);
void ReadMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len);
void WriteMultiDataFromIST8310(uint8_t addr, uint8_t* data, uint8_t len);
// 功能函数
void ReadIST8310Data(ist8310_raw_data_t* meg_data);
// 校验函数
ist8310_error_e VerifyMegId(uint8_t* id);
ist8310reg.h
/**
* @Author : Minghang Li
* @Date : 2022-12-03 15:27
* @LastEditTime : 2022-12-03 16:53
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#pragma once
/*-----IST8310寄存器地址-----*/
#define IST8310_CHIP_ID_ADDR 0x00
#define IST8310_CHIP_ID_VAL 0x10
#define IST8310_STAT1_ADDR 0x02
#define IST8310_DATA_XL_ADDR 0x03
#define IST8310_DATA_XH_ADDR 0x04
#define IST8310_DATA_YL_ADDR 0x05
#define IST8310_DATA_YH_ADDR 0x06
#define IST8310_DATA_ZL_ADDR 0x07
#define IST8310_DATA_ZH_ADDR 0x08
#define IST8310_STAT2_ADDR 0x09
#define IST8310_CNTL1_ADDR 0x0A
#define IST8310_CNTL1_SLEEP 0x00
#define IST8310_CNTL1_SINGLE 0x01
#define IST8310_CNTL1_CONTINUE 0x0B
#define IST8310_CNTL2_ADDR 0x0B
#define IST8310_STAT2_NONE_ALL 0x00
#define IST8310_SELF_CHECK_ADDR 0x0C
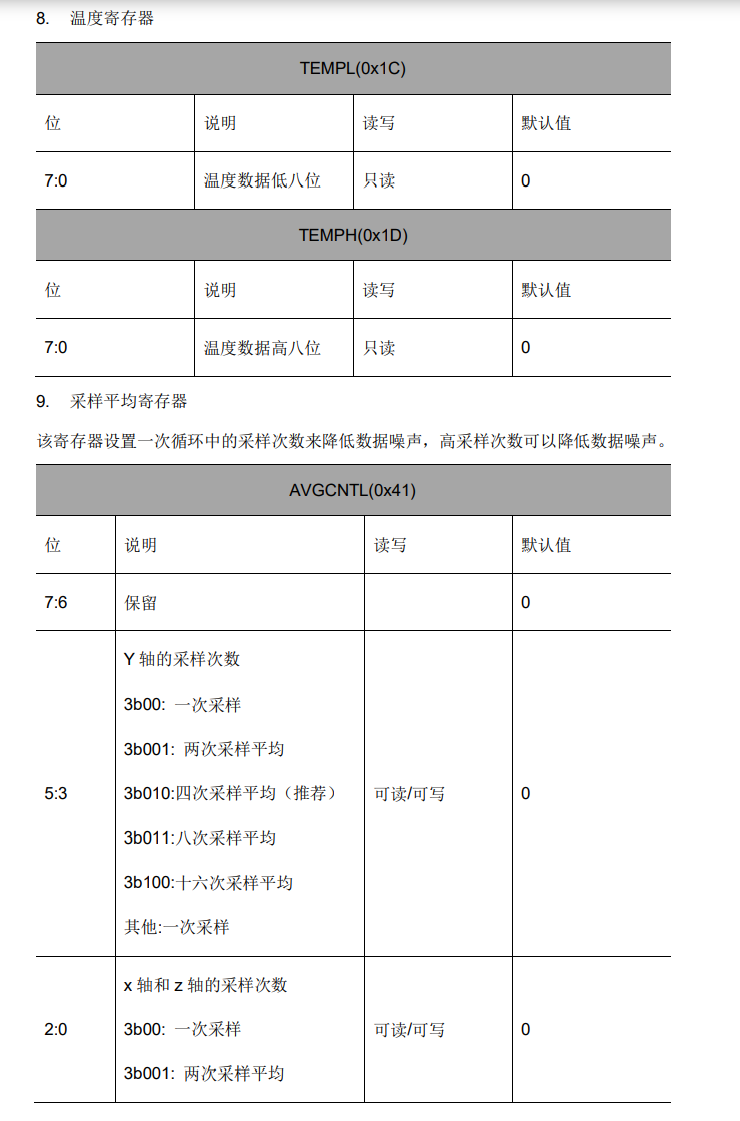
#define IST8310_TEMPL_ADDR 0x1C
#define IST8310_TEMPH_ADDR 0x1D
#define IST8310_AVGCNTL_ADDR 0x41
#define IST8310_AVGCNTL_TWICE 0x09
#define IST8310_AVGCNTL_FOURTH 0x12
效果如下:

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)