在上一篇文章中,分析了PID算法的基本数学原理,从PID算法的原理与实际应用,是可以看出其PID的优点与缺点的,ADRC算法(自抗扰控制)也可以说是针对PID算法的一些缺点,或者说工程中难以实现的点做的一个改进的算法。因此后续我会将ADRC的各个部分分别介绍与分析,本节即从最先出现的比较重要的环节---跟踪微分器开始。
PID的缺点
在开始学习跟踪微分器之前,有必要简要的介绍一下PID算法的主要缺点:
1.从PID的原理可以看出PID的稳定裕度是不小的,但其动态性能的裕度并不大。也就是说,如果被控对象处于一个动态变化的环境之中时,便需要经常改动PID的增益来达到控制效果
2.PID算法的核心是:基于误差反馈来消除误差,但有时这种方式并不是最合理的,在初始状态时,直接取这种误差,往往会使初始控制量太大而出现超调的现象,正是这个原因,导致PID算法控制的系统会有“快速性”与“超调”的矛盾
3.在实际应用中,由于实际测量很少有比较合适的微分器,导致大部分的系统使用PI控制,从而限制了PID的控制能力
上述描述中,有两个点比较重要,一个是由于初始误差较大而导致控制量大进而导致的超调问题,另一个是微分信号获取得不准确的问题导致PID中的D项没有发挥出应有的作用。而跟踪微分器便是一个解决这两个问题的一个较好的工具。
跟踪微分器的作用
与PID的缺点相对应,跟踪微分器的作用是提供两个信号:一个是目标点的过渡信号,一个是目标点过渡信号的微分信号。过渡信号的意思可以简单的理解为缓慢的向目标点靠近而不阶跃,不超调。即过渡信号可以理解为惯性环节,不超调,缓慢的向目标点生成一条曲线。
线性跟踪微分器
线性跟踪微分器的原理是根据二阶系统的一个传递函数得来,即:

这个传递函数的性质是非常好的,由于截止频率分子上与分母相等,都为r^2,因此此传递函数的阶跃响应最终会收敛到1,即稳态值是1。
另外,其中的阻尼系数 ξ 可以控制中间达到稳态时的过程,当 ξ <1 时,欠阻尼,阶跃响应速度变快,但是超调变大;当 ξ > 1时,过阻尼,系统没有超调,但是达到稳态的时间变长;当 ξ = 1 时,系统会无超调的一次进入稳态值。这便是我们想要的一个理想的线性跟踪微分器。当 ξ = 1时,传递函数就变成:

此时的参数 r 便可以代表系统的收敛速度,r越大,系统收敛得越快,就越快达到设定值,但实际调试的时候需要根据实际系统来调试r,不同的系统可以达到的实际收敛速度是不同的。
之后便可以根据此传递函数来推导出线性跟踪微分器(TD)的微分方程:

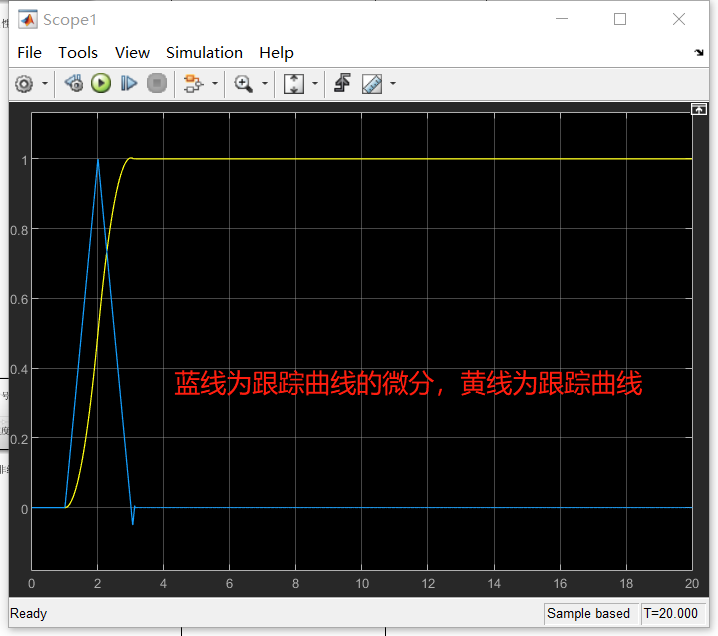
输出x1一直跟踪输入v,x2为x1的微分。接下来可以建立simulink模型看看效果:


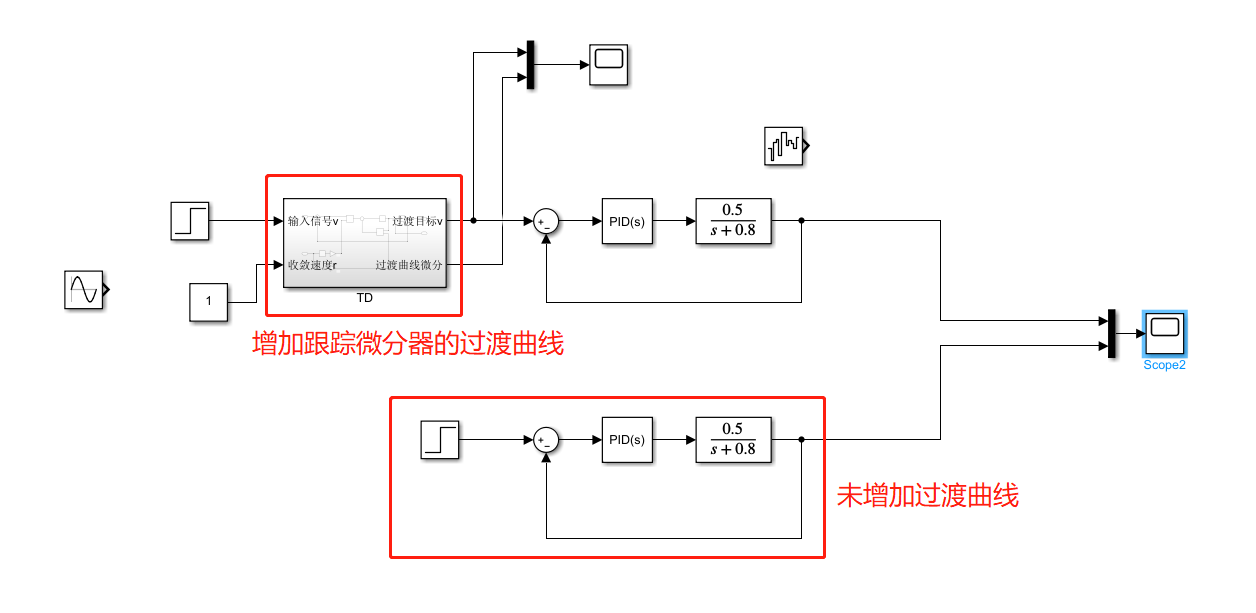
我们可以随便指定一个传递函数作为被控对象,之后一个使用PID模块,另一个输入信号增加过渡曲线之后,再经过PID模块,参数都只使用PI参数,都写一样,可以对比看一下过渡曲线的作用:

非线性跟踪微分器
非线性跟踪微分器首先可以联系线性跟踪微分器TD来建立一个二阶积分串联系统:
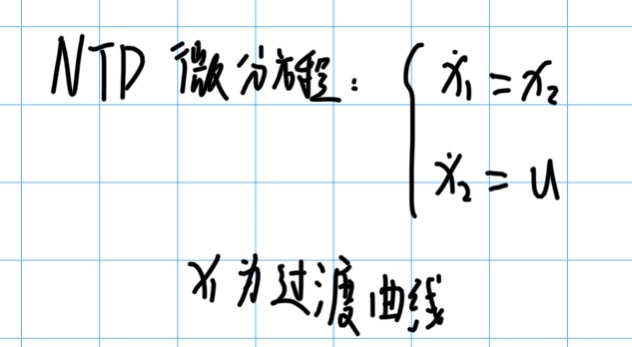
其中x1相当于是目标过渡信号,x2相当于是过渡信号的微分信号,如果将控制量 u 的控制率修改为一个非线性函数,便可以得到一个非线性跟踪微分器,这个非线性函数的形式有很多种,比较常用的是快速最优控制综合函数:
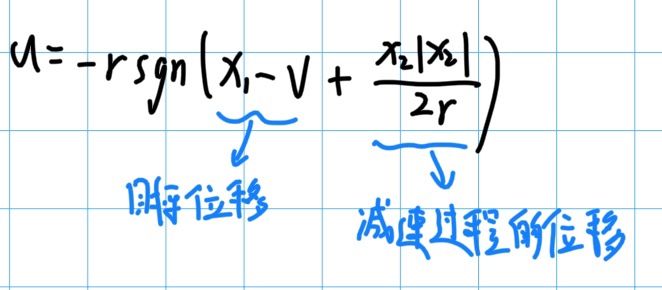
快速最优控制综合函数有点像最优控制中 bang-bang控制的思想,不过其原理的话,也比较容易理解,我们可以将这个式子拆分来理解:
v 为目标位置,x1为当前位置,x1 - v 表示的是目标位移,即像上图中,将符号函数括号内的内容看做两部分组成,一个是目标位移,一个是减速到0过程的位移,减速过程的位移还是挺好推导的,高中的物理知识:
x = (v1^2 - V2^2) / 2*a
由于减速是有正负号的,因此写作 x2 * |x2| 的形式。当目标位移比减速过程的位移大时,即减速到0并不能达到目标位置,因此u = -r ,以-r的加速度减速,反之,则u = +r,加速。
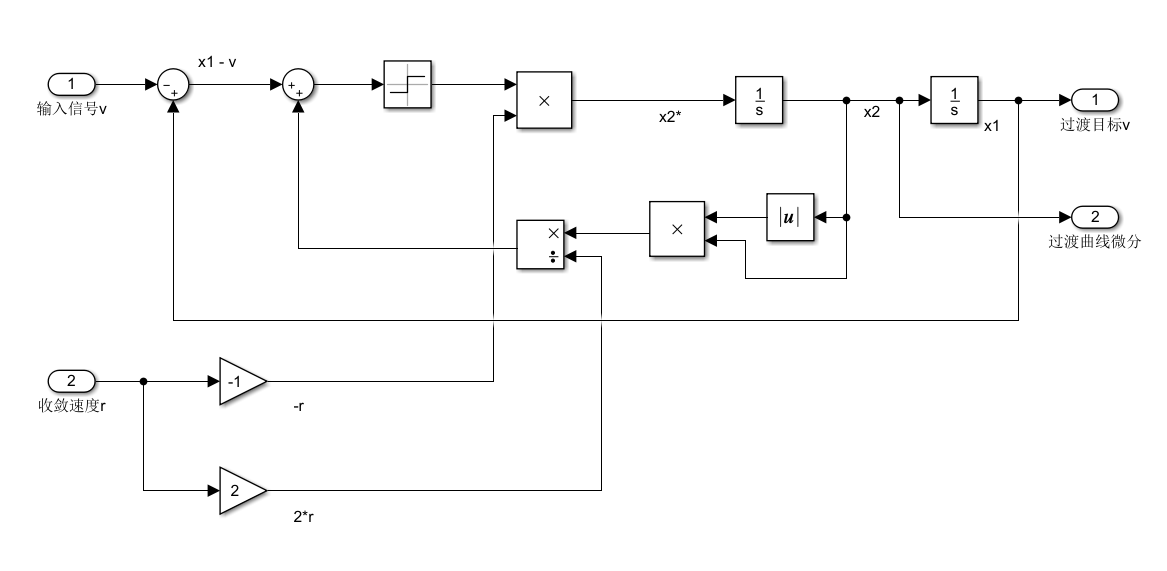
之后可以建立simulink模型来观察:
线性与非线性跟踪微分器对比
将两个微分器的效果进行对比,使用相同的参数r:

在使用相同的阶跃信号与相同的参数r的情况下,非线性跟踪微分器的收敛速度是要快很多的,不过也有末端的尖峰的缺点,不过具体他们的实际效果作用在控制系统中如何,需要后续再进一步对比。其实做到这一步,已经有对于PID算法的改进效果了,不过后续再针对性的做实验,记录笔记。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)