0. 简介
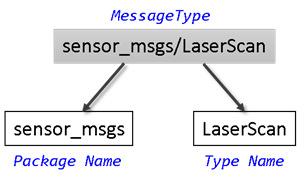
消息是ROS中交换数据的主要容器。主题和服务使用消息在节点之间传输数据。为了标识其数据结构,每条消息都有一个消息类型。例如,来自激光扫描仪的传感器数据通常以sensor_msgs/LaserScan类型的消息发送。每种消息类型标识消息中包含的数据元素。每个消息类型名称都是一个包名称。
MATLAB支持在机器人应用程序中经常遇到的许多ROS消息类型。这个例子展示了在MATLAB中创建、探索和填充ROS消息的一些方法。
1. 查找消息类型
初始化ROS主节点和全局节点
rosinit
Launching ROS Core…
Done in 0.37599 seconds.
Initializing ROS master on http://172.29.217.11:53161.
Initializing global node /matlab_global_node_29455 with NodeURI http://dcc083455glnxa64:37683/ and MasterURI http://localhost:53161.
使用exampleHelperROSCreateSampleNetwork使用另外三个节点以及示例发布者和订阅者填充ROS网络。
网络上有各种节点,它们都有一些主题和关联的发布者和订阅者。
您可以通过调用rostopic list查看可用主题的完整列表。
rostopic list
/pose
/rosout
/scan
/tf
如果您想了解更多关于通过/scan主题发送的数据类型的信息,请使用rostopic info命令来检查它。/scan的消息类型为sensor_msgs/LaserScan
rostopic info /scan
Type: sensor_msgs/LaserScan
Publishers:
/node_3 (http://dcc083455glnxa64:36623/)
Subscribers:
/node_1 (http://dcc083455glnxa64:42445/)
/node_2 (http://dcc083455glnxa64:39859/)
命令输出还告诉您哪些节点正在发布和订阅主题。要了解有关发布者和订阅者的信息,请参见调用和提供ROS服务。
若要了解有关主题消息类型,rosmessage支持消息类型的TAB补全。若要完成消息类型名称,请键入要完成的名称的前几个字符,然后按Tab键。
scandata = rosmessage("sensor_msgs/LaserScan","DataFormat","struct")
scandata = struct with fields:
MessageType: ‘sensor_msgs/LaserScan’
Header: [1x1 struct]
AngleMin: 0
AngleMax: 0
AngleIncrement: 0
TimeIncrement: 0
ScanTime: 0
RangeMin: 0
RangeMax: 0
Ranges: [0x1 single]
Intensities: [0x1 single]
要查看主题和服务可用的所有消息类型的完整列表,请使用rosmsg list
2. 消息结构获取
ROS消息是对象,消息数据存储在属性中。MATLAB具有方便的方法来查找和探索消息的内容。
如果订阅了/pose主题,则可以接收和检查发送的消息。
posesub = rossubscriber("/pose","DataFormat","struct")
posesub =
Subscriber with properties:
TopicName: ‘/pose’
LatestMessage: []
MessageType: ‘geometry_msgs/Twist’
BufferSize: 1
NewMessageFcn: []
DataFormat: ‘struct’
使用receive从订阅者获取数据。一旦接收到新消息,函数将返回该消息并将其存储在posedata变量中(第二个参数是以秒为单位的超时)。
posedata = receive(posesub,10)
posedata = struct with fields:
MessageType: ‘geometry_msgs/Twist’
Linear: [1x1 struct]
Angular: [1x1 struct]
该消息的类型为geometry_msgs/Twist。消息中还有另外两个字段:Linear和Angular。您可以通过直接访问这些消息字段来查看它们的值:
posedata.Linear
ans = struct with fields:
MessageType: ‘geometry_msgs/Vector3’
X: 0.0457
Y: -0.0015
Z: 0.0300
posedata.Angular
ans = struct with fields:
MessageType: ‘geometry_msgs/Vector3’
X: -0.0358
Y: -0.0078
Z: 0.0416
这些消息字段的每个值实际上都是一条消息。它们的消息类型是geometry_msgs/Vector3。geometry_msgs/Twist是由两条geometry_msgs/Vector3消息组成的复合消息。
xpos = posedata.Linear.X
xpos = 0.0457
如果希望快速总结消息中包含的所有数据,请调用rosShowDetails函数。rosShowDetails适用于任何类型的消息,并递归地显示所有消息数据字段。
rosShowDetails(posedata)
ans =
’
MessageType : geometry_msgs/Twist
Linear
MessageType : geometry_msgs/Vector3
X : 0.04571669482429456
Y : -0.001462435127715878
Z : 0.03002804688888001
Angular
MessageType : geometry_msgs/Vector3
X : -0.03581136613727846
Y : -0.007823871737372501
Z : 0.04157355251890671’
rosShowDetails在调试期间和希望快速查看消息内容时提供帮助。
3. 设置消息信息
ROS 消息是结构。可以直接复制它们以生成新的消息。副本和原始消息都有自己的数据。创建一条类型为geometry_msgs/Twist的消息。
twist = rosmessage("geometry_msgs/Twist","DataFormat","struct")
twist = struct with fields:
MessageType: ‘geometry_msgs/Twist’
Linear: [1x1 struct]
Angular: [1x1 struct]
缺省情况下,此消息的数字字段初始化为0。您可以修改此消息的任何属性。例如Y等于5。
twist.Linear.Y = 5;
查看消息数据以确保您的更改生效
twist.Linear
ans = struct with fields:
MessageType: ‘geometry_msgs/Vector3’
X: 0
Y: 5
Z: 0
一旦用您的数据填充了消息,您就可以将其用于发布者、订阅者和服务。参见“与ROS发布者和订阅者交换数据”和“调用和提供ROS服务”示例。然后就可以通过publish发布我们设置的消息信息了
thermometerNode = ros2node("/thermometer");
tempPub = ros2publisher(thermometerNode,"/twist","sensor_msgs/geometry_msgs/Twist");
tempMsgs(10) = twist; % Pre-allocate message structure array
for iMeasure = 1:10
% Copy blank message fields
tempMsgs(iMeasure) = twist;
% Record sample message
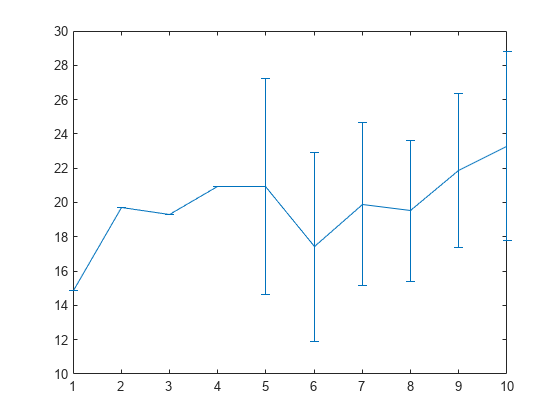
tempMsgs(iMeasure).Linear.Y = 20+randn*3;
% Only calculate the variation once sufficient data observed
if iMeasure >= 5
tempMsgs(iMeasure).Linear.X= var([tempMsgs(1:iMeasure).Linear.Y]);
end
% Pass the data to subscribers
send(tempPub,tempMsgs(iMeasure))
end
errorbar([tempMsgs.Linear.Y],[tempMsgs.Linear.X])
4. 保存和加载消息
您可以保存消息并存储内容以供以后使用。
例如从订阅者获取一条新消息。
posedata = receive(posesub,10)
然后使用MATLAB的保存函数将姿态数据保存到MAT文件中。
save('posedata.mat','posedata')
在将文件加载回工作空间之前,清除posedata变量。
clear posedata
现在可以通过调用load函数加载消息数据。这将从上面将posedata加载到messageData结构中。Posedata是结构的一个数据字段。
messageData = load('posedata.mat')
messageData = struct with fields:
posedata: [1x1 struct]
检查messageData。Posedata来查看消息内容。
messageData.posedata
ans = struct with fields:
MessageType: ‘geometry_msgs/Twist’
Linear: [1x1 struct]
Angular: [1x1 struct]
然后可以删除MAT文件
delete('posedata.mat')
5. Message数据转化
由于在Matlab中,ROS消息的每个元素是独立的,因此无法验证具有多个值在数学层面上的有效性。因为每个值都可以单独设置,所以消息不会将属性作为一个整体进行验证。例如,四元数消息包含w、x、y和z属性,但该消息并不强制四元数作为一个整体是有效的。所以有可能在单独修改一个四元数信息后,这个四元数是不符合模型的。同时消息属性还可以具有各种数据类型。MATLAB使用ROS设置的规则来确定这些数据类型。为此,这些数据类型必须映射到MATLAB数据类型才能在MATLAB中使用。下表总结了如何将ROS数据类型转换为MATLAB数据类型。

同时在Matlab中也自带了一些常用的msg包,这些包包含了常用的消息类型、服务类型或操作类型。可以在MATLAB命令窗口中调用rosmsg list查看,当然也可以通过第二讲提到的方法。通过ROS Toolbox的ROS自定义消息支持来生成新的消息定义。同时值得注意的是,在指定消息类型时,输入字符向量必须与rosmsg列表中列出的字符向量完全匹配。
ackermann_msgs
actionlib
actionlib_msgs
actionlib_tutorials
adhoc_communication
app_manager
applanix_msgs
ar_track_alvar
arbotix_msgs
ardrone_autonomy
asmach_tutorials
audio_common_msgs
axis_camera
base_local_planner
baxter_core_msgs
baxter_maintenance_msgs
bayesian_belief_networks
blob
bond
brics_actuator
bride_tutorials
bwi_planning
bwi_planning_common
calibration_msgs
capabilities
clearpath_base
cmvision
cob_base_drive_chain
cob_camera_sensors
cob_footprint_observer
cob_grasp_generation
cob_kinematics
cob_light
cob_lookat_action
cob_object_detection_msgs
cob_perception_msgs
cob_phidgets
cob_pick_place_action
cob_relayboard
cob_script_server
cob_sound
cob_srvs
cob_trajectory_controller
concert_msgs
control_msgs
control_toolbox
controller_manager_msgs
costmap_2d
create_node
data_vis_msgs
designator_integration_msgs
diagnostic_msgs
dna_extraction_msgs
driver_base
dynamic_reconfigure
dynamic_tf_publisher
dynamixel_controllers
dynamixel_msgs
epos_driver
ethercat_hardware
ethercat_trigger_controllers
ethzasl_icp_mapper
explorer
face_detector
fingertip_pressure
frontier_exploration
gateway_msgs
gazebo_msgs
geographic_msgs
geometry_msgs
gps_common
graft
graph_msgs
grasp_stability_msgs
grasping_msgs
grizzly_msgs
handle_detector
hector_mapping
hector_nav_msgs
hector_uav_msgs
hector_worldmodel_msgs
household_objects_database_msgs
hrpsys_gazebo_msgs
humanoid_nav_msgs
iai_content_msgs
iai_kinematics_msgs
iai_pancake_perception_action
image_cb_detector
image_exposure_msgs
image_view2
industrial_msgs
interaction_cursor_msgs
interactive_marker_proxy
interval_intersection
jaco_msgs
joint_states_settler
jsk_footstep_controller
jsk_footstep_msgs
jsk_gui_msgs
jsk_hark_msgs
jsk_network_tools
jsk_pcl_ros
jsk_perception
jsk_rviz_plugins
jsk_topic_tools
keyboard
kingfisher_msgs
kobuki_msgs
kobuki_testsuite
laser_assembler
laser_cb_detector
leap_motion
linux_hardware
lizi
manipulation_msgs
map_merger
map_msgs
map_store
mavros
microstrain_3dmgx2_imu
ml_classifiers
mln_robosherlock_msgs
mongodb_store
mongodb_store_msgs
monocam_settler
move_base_msgs
moveit_msgs
moveit_simple_grasps
multimaster_msgs_fkie
multisense_ros
nao_interaction_msgs
nao_msgs
nav_msgs
nav2d_msgs
nav2d_navigator
nav2d_operator
navfn
network_monitor_udp
nmea_msgs
nodelet
object_recognition_msgs
octomap_msgs
p2os_driver
pano_ros
pcl_msgs
pcl_ros
pddl_msgs
people_msgs
play_motion_msgs
polled_camera
posedetection_msgs
pr2_calibration_launch
pr2_common_action_msgs
pr2_controllers_msgs
pr2_gazebo_plugins
pr2_gripper_sensor_msgs
pr2_mechanism_controllers
pr2_mechanism_msgs
pr2_msgs
pr2_power_board
pr2_precise_trajectory
pr2_self_test_msgs
pr2_tilt_laser_interface
program_queue
ptu_control
qt_tutorials
r2_msgs
razer_hydra
rmp_msgs
robot_mechanism_controllers
robot_pose_ekf
roboteq_msgs
robotnik_msgs
rocon_app_manager_msgs
rocon_service_pair_msgs
rocon_std_msgs
rosapi
rosauth
rosbridge_library
roscpp
roscpp_tutorials
roseus
rosgraph_msgs
rospy_message_converter
rospy_tutorials
rosruby_tutorials
rosserial_arduino
rosserial_msgs
rovio_shared
rtt_ros_msgs
s3000_laser
saphari_msgs
scanning_table_msgs
scheduler_msgs
schunk_sdh
segbot_gui
segbot_sensors
segbot_simulation_apps
segway_rmp
sensor_msgs
shape_msgs
shared_serial
sherlock_sim_msgs
simple_robot_control
smach_msgs
sound_play
speech_recognition_msgs
sr_edc_ethercat_drivers
sr_robot_msgs
sr_ronex_msgs
sr_utilities
statistics_msgs
std_msgs
std_srvs
stdr_msgs
stereo_msgs
stereo_wall_detection
tf
tf2_msgs
theora_image_transport
topic_proxy
topic_tools
trajectory_msgs
turtle_actionlib
turtlebot_actions
turtlebot_calibration
turtlebot_msgs
turtlesim
um6
underwater_sensor_msgs
universal_teleop
uuid_msgs
velodyne_msgs
view_controller_msgs
visp_camera_calibration
visp_hand2eye_calibration
visp_tracker
visualization_msgs
wfov_camera_msgs
wge100_camera
wifi_ddwrt
wireless_msgs
yocs_msgs
zeroconf_msgs
6. Message中的队列
在ROS中有一些复杂的消息中可以包含其他的消息,并形成消息数组。例如在exampleHelperROSCreateSampleNetwork例子中,变量tf包含一个消息,这个消息的主要作用是坐标转换的tf/tfMessage类型。通过输入tf我们可以看到
tf
tf = struct with fields:
MessageType: ‘tf/tfMessage’
Transforms: [1x53 struct]
tf有两个字段:MessageType包含一个标准数据数组,而Transforms包含一个对象数组。在Transforms中存储了53条消息,它们都具有相同的结构。在Transforms中展开tf以查看结构:
…详情请参照古月居
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)