根据一般PID的响应曲线,我们可以设计更加符合响应曲线的P、I、D参数,这里的非线性是指参数整定方法采用非线性,并不是PID本身的算法,非线性的PID算法后面会给大家讲。包括韩京清老师提出的ADRC都属于非线性PID范畴。本文给出主要的公式算法实现,Kp项完整scl代码已经给出,Ki和Kd项按照公式计算即可这里不再列出。具体PID里面系数传递自行设计测试就好。
1、比例(P),积分系数(Ki)、微分系数(Kd)对应的非线性算法如下:
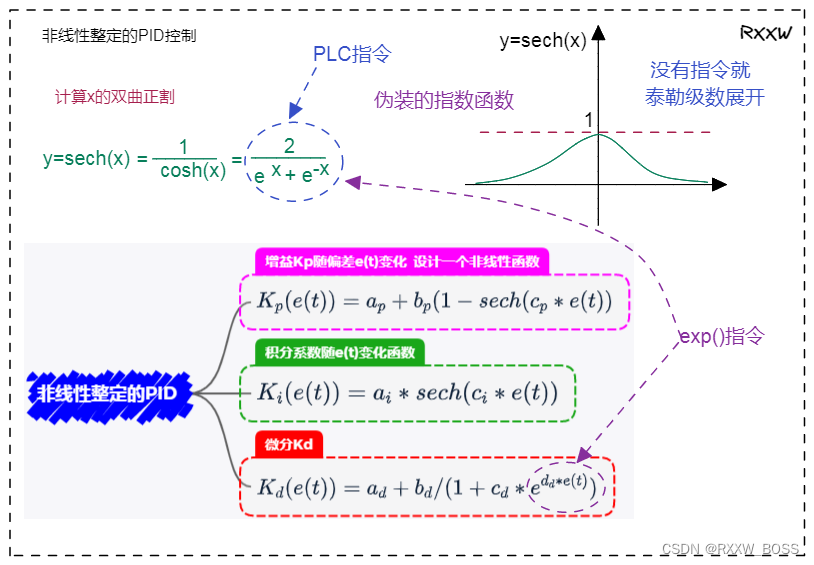
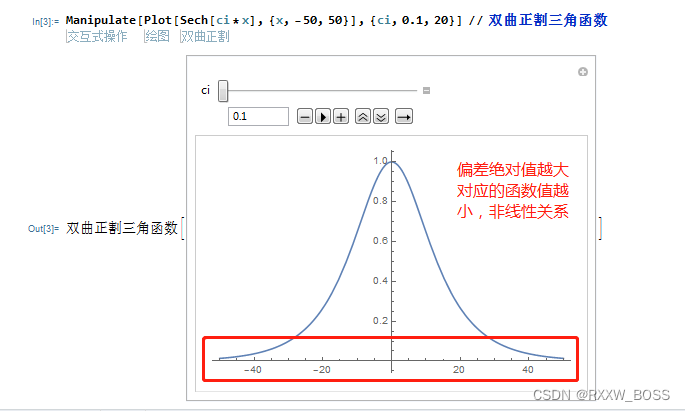
关于双曲三角函数,不太清楚的可以简单的翻下书本,这里不做过多讲解 ,简单的看下它的函数 图像,为什么我们选定这个函数做为核函数。
微分项上图的由于笔误,大家可以看下面的这张图
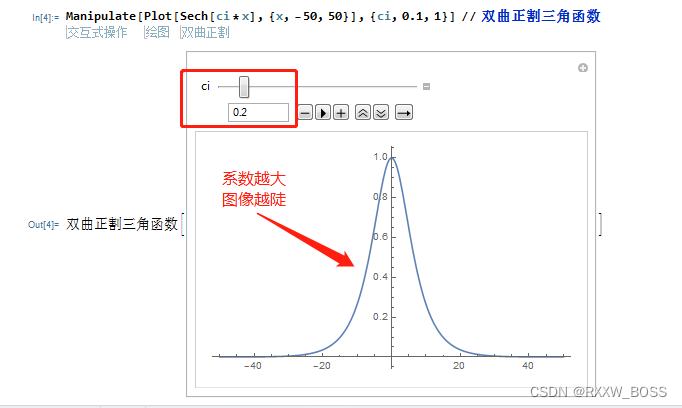
系数越大图像越陡
对核函数进行各种复合运算以产生我们需要的函数变化曲线
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)