目录
- 前言
-
- 一、准备工作
-
- 二、编译 ./build.sh
- 1.删除一些build文件夹
- 2.创建 Vocabulary 文件夹
- 3.编译
-
- 4.解决 段错误(核心已转储)
-
- 5.viewer视图里只有坐标系,没有点云
- 1.改动`pointcloudmapping.h`文件
- 2.查看TUMx.yaml文件里有没有点云地图的参数,没有就加在最后面
- 6.运行TUM数据集
- 三、编译 ./build_ros.sh
- 1.将该工程添加至 **ROS_PACKAGE_PATH**
- 2.编译前修改一个文件
- 3.编译
-
- 4.运行
前言
本文写于2022年11月25日。
系统版本
Ubuntu18.04 + ROS melodic
一、准备工作
ORB-SLAM2_RGBD_DENSE_MAP-master 是基于 ORB_SLAM2 改动的, ORB_SLAM2 编译前一些库的安装以及编译时的报错参考此篇博客
下载源码
ORB-SLAM2_RGBD_DENSE_MAP-master源码地址
建立ROS工作空间 ~/ORB-SLAM2_ws/src
如果没有安装 Ros Melodic ,参考Ubuntu18.04安装Ros Melodic 以及测试rviz
如果安装了 Ros Melodic ,没有创建ROS空间,参考此篇博客
二、编译 ./build.sh
1.删除一些build文件夹
删除ORB-SLAM2_RGBD_DENSE_MAP-master/Thirdparty/DBoW2/build 文件夹
2.创建 Vocabulary 文件夹
将 ORB_SLAM2 下的 Vocabulary 子文件夹复制粘贴到 ORB_SLAM2_modified 文件夹下
3.编译
进入 ORB_SLAM2_modified 文件夹
cd ORB_SLAM2_modified
给 build.sh 文件权限
chmod +x build.sh
编译 build.sh 文件
./build.sh
1)错误1
 原因:
原因:ORB-SLAM2_RGBD_DENSE_MAP-master/tools里的bin_vocabulary文件出问题了,在编译的时候会将此文件删除导致出现该文件不存在的问题。
 解决办法:
解决办法:
1)打开build.sh文件,将最后几行注释掉
 编译一下,
编译一下,ORB-SLAM2_RGBD_DENSE_MAP-master/tools里的bin_vocabulary文件正常了,将build.sh文件,将最后几行取消注释再次编译,不报错了。

下面两个问题解决参考链接
4.解决 段错误(核心已转储)
改动一
在 CMakeLists.txt 中删除 -march=native(12行左右)
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3")
在 Thirdparty/g2o/CMakeLists.txt中删除 -march=native(57行左右)
SET(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -O3 -march=native")
SET(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -O3 -march=native")
SET(CMAKE_CXX_FLAGS_RELEASE "${CMAKE_CXX_FLAGS_RELEASE} -O3")
SET(CMAKE_C_FLAGS_RELEASE "${CMAKE_C_FLAGS_RELEASE} -O3")
改动二
在有定义Eigen的头文件中添加预编译命令EIGEN_MAKE_ALIGNED_OPERATOR_NEW
我在include路径下Converter.h、LoopClosing.h、PointCloude.h这三个文件做了修改

LoopClosing.h文件,将下面的注释了,在上面添加了


我改了之后偶尔也会遇到段错误,暂时没啥办法。
5.viewer视图里只有坐标系,没有点云
1.改动pointcloudmapping.h文件
bool loopbusy;
bool loopbusy = false;
由于我安装了pcl1.8的库,作者源码给了pcl1.7的库,导致pointcloudmapping.h头文件重复包含了,整个代码是灰色的,所以将作者源码pcl整个文件夹删掉了,并且将CMakeLists.txt中find_package( PCL 1.7 REQUIRED )改成了find_package( PCL 1.8 REQUIRED )。
2.查看TUMx.yaml文件里有没有点云地图的参数,没有就加在最后面
PointCloudMapping.Resolution: 0.01
meank: 50
thresh: 2.0
6.运行TUM数据集
使用如下命令./bin/rgbd_tum Vocabulary/ORBvoc.bin path_to_settings path_to_sequence path_to_association
我的命令如下
./bin/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.yaml /home/d/文档/数据集/TUM数据集/rgbd_dataset_freiburg3_long_office_household /home/d/文档/数据集/TUM数据集/rgbd_dataset_freiburg3_long_office_household/associations.txt

最后保存了result.pcd点云文件

三、编译 ./build_ros.sh
1.将该工程添加至 ROS_PACKAGE_PATH
打开终端输入
sudo gedit ~/.bashrc
在最后一行插入
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:~/ORB-SLAM2_ws/src/ORB-SLAM2_RGBD_DENSE_MAP-master/Examples/ROS
注: ~/catkin_orb/src/ 为我 ORB-SLAM2_RGBD_DENSE_MAP-master 的路径,需要改成自己的文件路径
刷新 bash
source ~/.bashrc
检验 ROS path 是否被识别
echo $ROS_PACKAGE_PATH
显示了刚刚加入的路径,说明ROS路径配置成功了
2.编译前修改一个文件
3.编译
进入 ORB_SLAM2_modified 文件夹
cd ORB_SLAM2_modified
给 build_ros.sh 文件权限
chmod +x build_ros.sh
编译 build_ros.sh 文件
./build_ros.sh
1.错误1

找不到pcl库,原来是Examples/ROS/ORB_SLAM21/CMakeLists.txt也是在找pcl1.7库,把include_directories(/usr/include/pcl-1.7)改成include_directories(/usr/include/pcl-1.8)。
2.错误2
编译时这样

运行时这样

解决办法:(具体为啥不清楚,但是这样编译后可以运行)
步骤1:删掉ORB-SLAM2_RGBD_DENSE_MAP-master/lib文件夹下的图片中三个文件
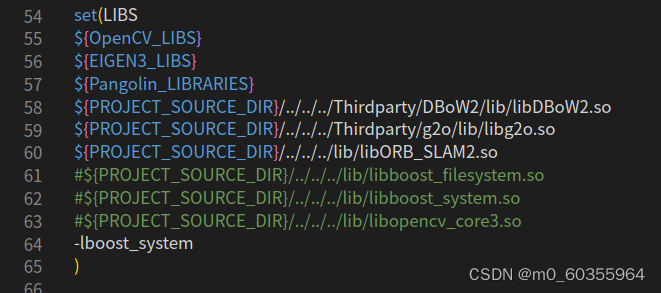
 步骤2:在
步骤2:在ORB-SLAM2_RGBD_DENSE_MAP-master/Examples/ROS/ORB_SLAM21/CMakeLists.txt里做如下修改
4.运行
首先在进入到realsense-ros下,打开终端
source devel/setup.bash
roslaunch realsense2_camera rs_rgbd.launch
接着在~/ORB-SLAM2_ws/src/ORB-SLAM2_RGBD_DENSE_MAP-master文件夹下再打开一个终端输入
rosrun ORB_SLAM21 RGBD Vocabulary/ORBvoc.txt Examples/ROS/ORB_SLAM21/MyD435i.yaml
运行一直会有问题段错误 (核心已转储),但是多运行几次就可以了。

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)