如图,
解决方法如下:
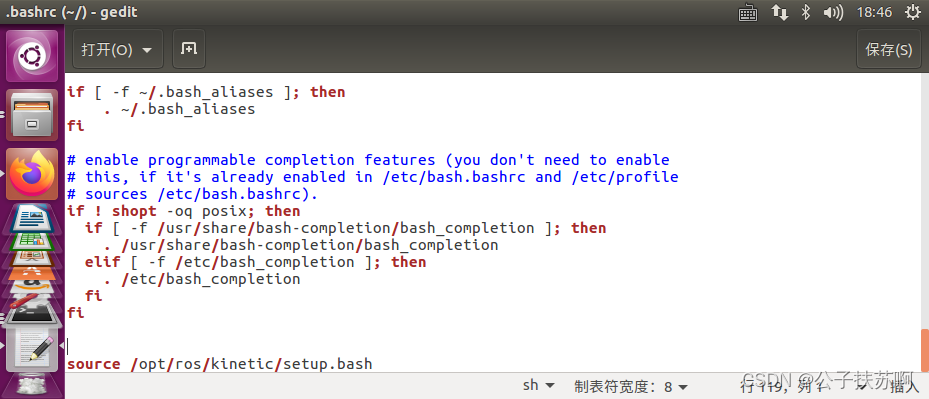
打开虚拟机终端,输入 gedit .bashrc
弹出一个文件,找到最后一行,如图所示
然后我roscore了一下,看了一下我的ros版本:
是kinetic,于是把文件中的melodic改成了kinetic,重复的都删了,之后保存,再打开终端,就好了。