CLion是个很好用的IDE,但是在用CLion写C/C++代码时,中文输出会是乱码,此前博主也找了很多资料,但是网上的教程大多都是脱裤子放屁,治标不治本,在这里,博主偶然发现了一个完美的解决方法。
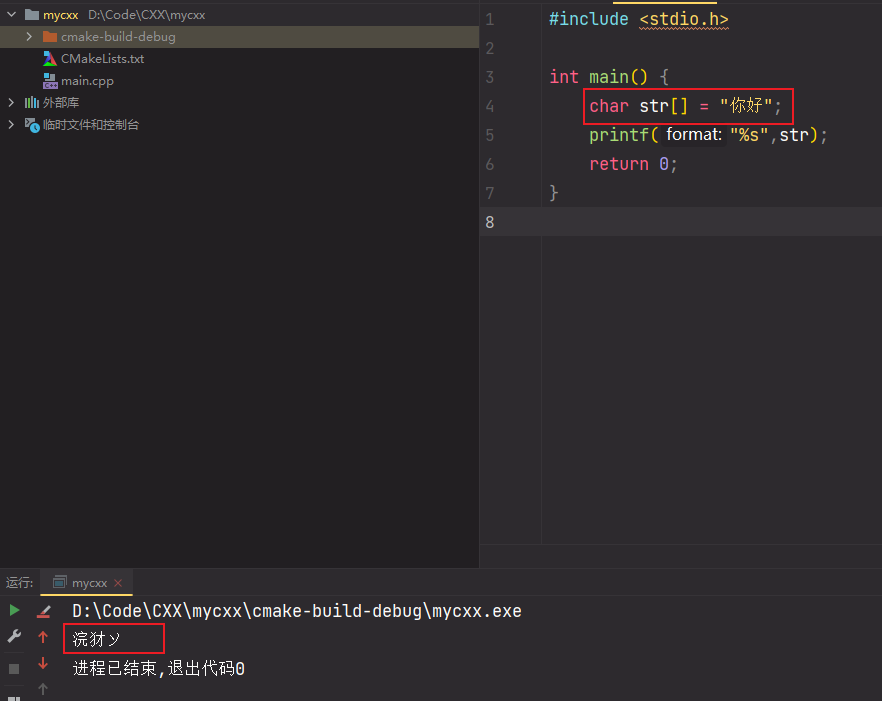
首先,我们看没有解决之前的一张截图,可以看到中文输出是乱码的。
造成这样的原因是CLion本身的BUG,控制台的编码默认是UTF-8,网上大多数的教程都是各种改编码,问题是可以解决,但是并不完美。我突然想到,既然CLion本身的控制台有BUG,那么不用它本身的控制台不就行了?相信很多人学习C/C++语言都是用的Visual Studio吧,也很熟悉,那个黑窗口,CLion其实也是可以的。下面我会讲讲详细的设置,调用系统的控制台。
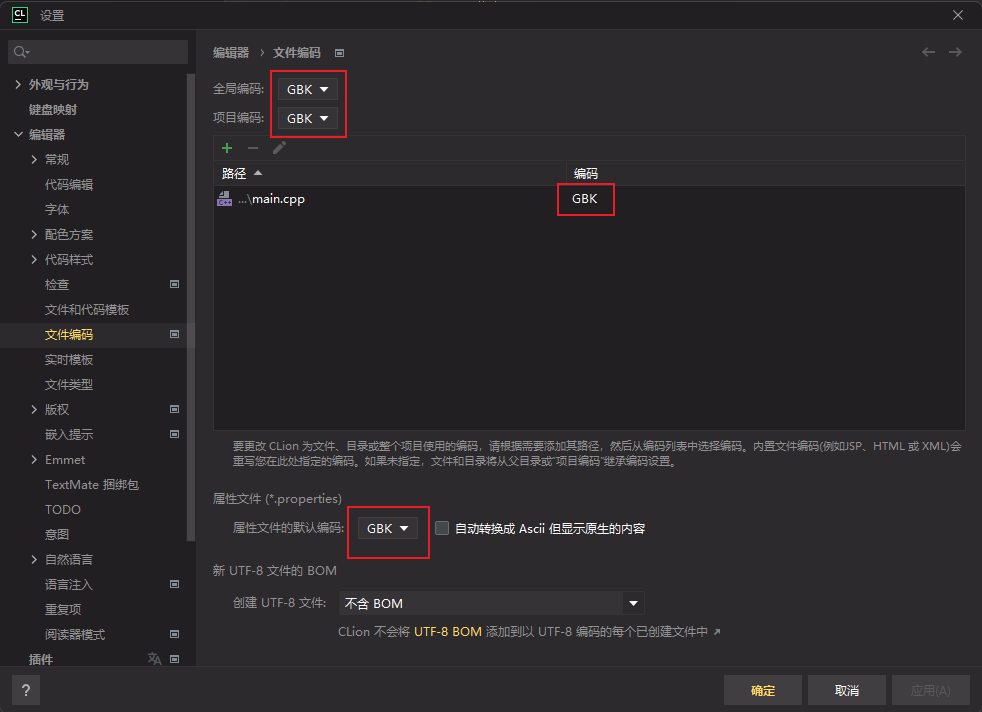
首先,系统的控制台默认编码是GBK,所以要求我们的文件编码也是GBK(不要过多纠结UTF-8和GBK,毕竟MSVC也是GBK)。具体设置如下:
Ctrl+Shift+S打开设置,把这几项都改成GBK编码格式,然后点击确定。
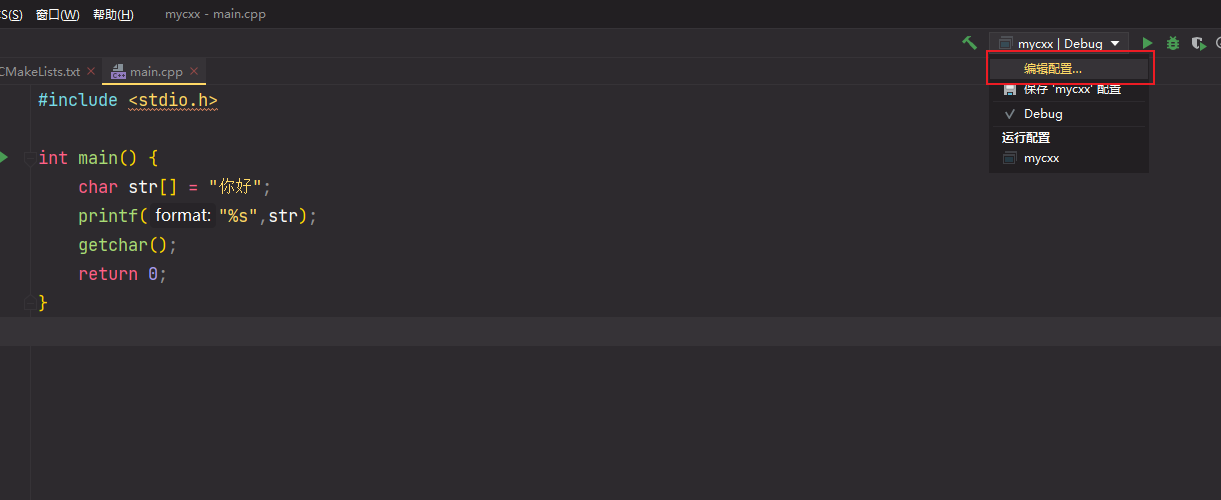
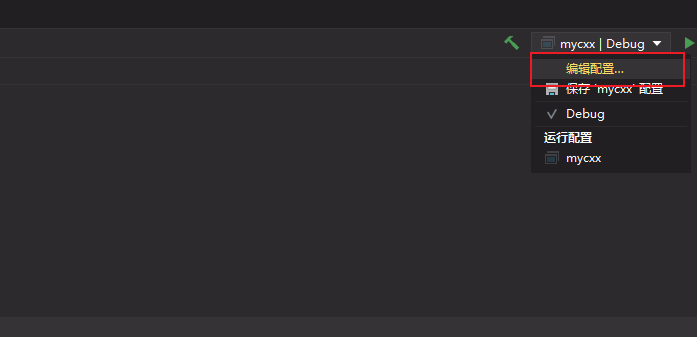
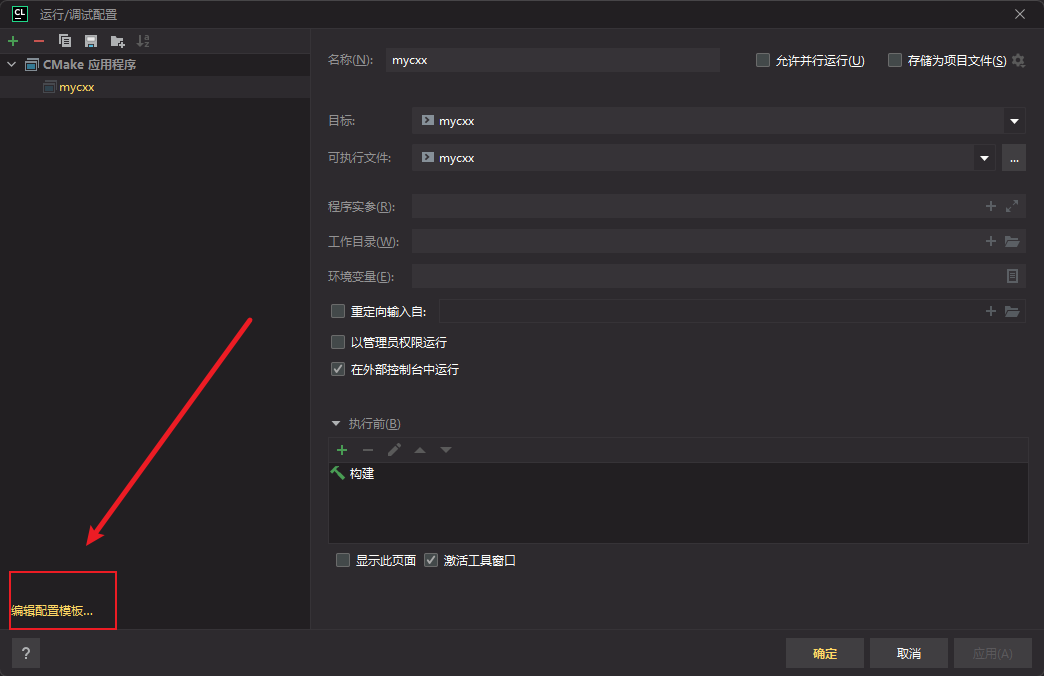
回到主界面,点击右上角的编辑配置。
勾选在外部控制台运行。
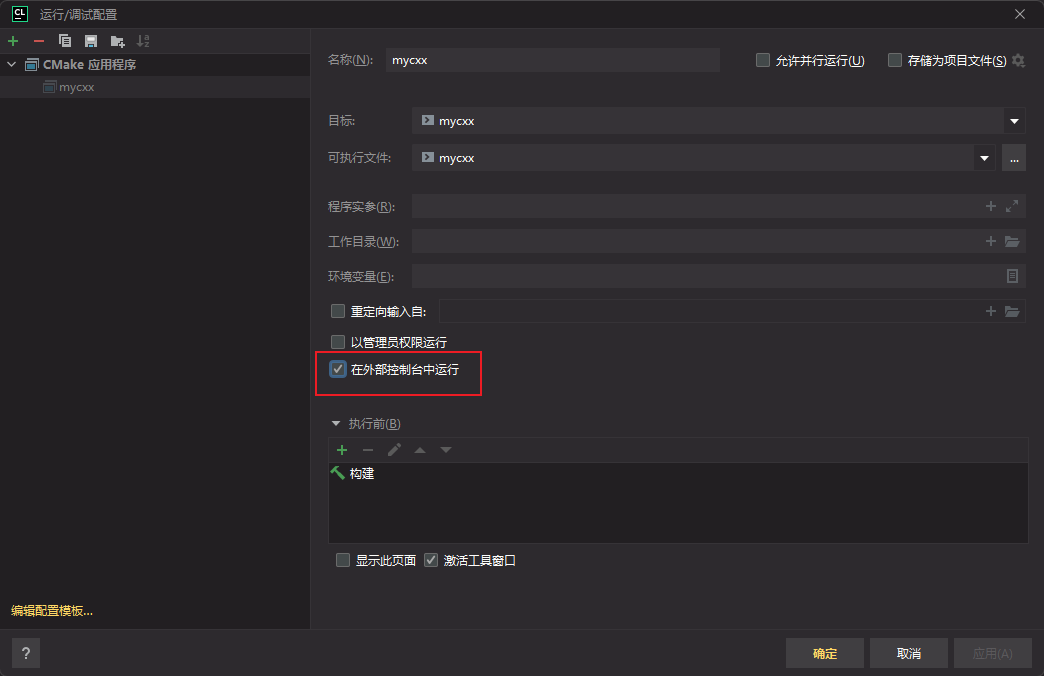
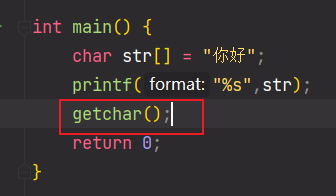
然后点击确定,到此大功告成,在运行之前,需要在主代码里面加一句代码,不然控制台会一闪而过,代码如下:
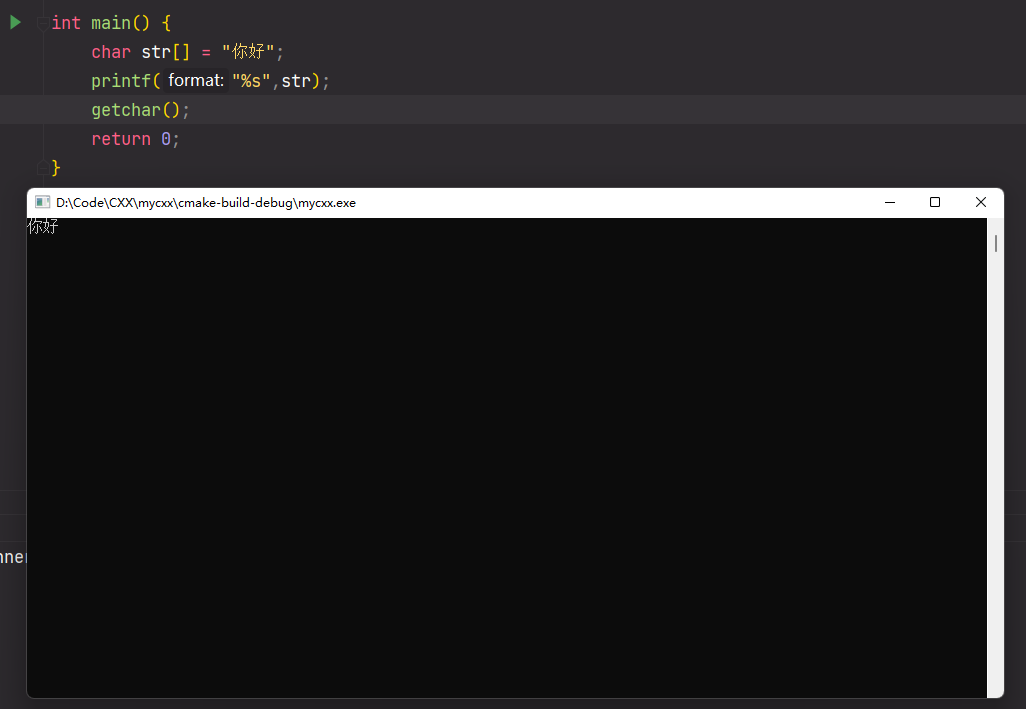
运行结果:
此时,运行或者debug都没有乱码,大功告成。
还有值得注意一点的是,是不是每次都要这样配置呢?如果每次都要配置一次,岂不是很麻烦。当然不会,CLion可以有默认配置。
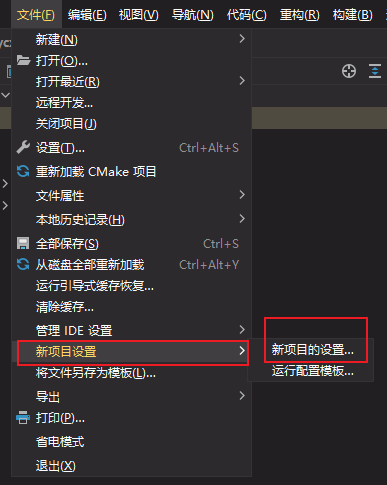
点击左上角文件,依次找到新项目设置,新项目的设置,点击打开。
这个就是每次创建新项目的时候的默认设置了。
将这几项都设置为GBK。

接着回到主界面,还是点击右上角的编辑配置
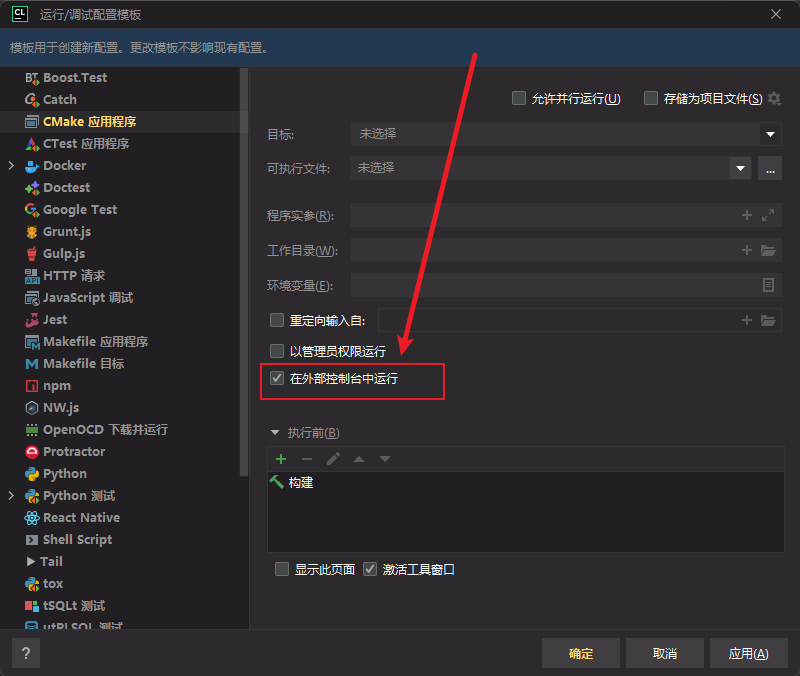
点击编辑配置模板
勾选在外部控制台中运行。
点击确定,到此,全部设置完毕,这下不会再出现中文乱码的问题了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)