【PX4 二次开发 初级】 03 飞控调试以及地面站使用
- 前言
- IMU
- 三轴稳定性
- 内部构成
-
- 误差
-
- 磁力计干扰测试
- 标题 : PX4二次开发教程:
- 起源: 根据阿木实验室讲解课程整理的学习笔记,推荐大家学习无人机的去学习这个课程,俗话说的好:问渠那得清如许,唯有源头活水来 -
- PX4智能无人机开发课程:https://bbs.amovlab.com/plugin.php?id=zhanmishu_video:video&mod=video&cid=39
前言
在调试飞机之前,先学习一些基本传感器特点等概念,针对这些传感器的特性去调试飞机就会事半功倍。
对于
- PIXHWAK 校准时候为什么要旋转?
- 为什么要水平放置?
认识一些理论认识,才能调试出较好的效果
IMU
起飞前的安装校准,大部分就是校准IMU的各个传感器误差偏移
IMU 用来根据当前姿态做出调整,来保证飞机的飞行稳定
- 飞行中突然的姿态不稳定,或者失控,多半是因为IMU 硬件受到干扰,或者软件的BUG
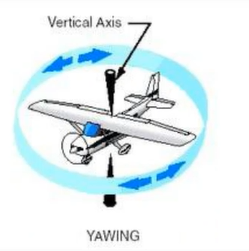
三轴稳定性
- 俯仰
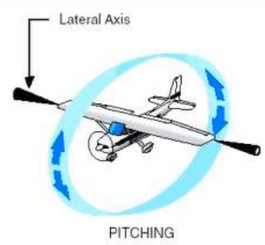
- 横滚

内部构成
IMU 一般包含陀螺仪 ,磁力技 ,加速度 三个部分
其中最重要的是陀螺仪,理论上陀螺仪就可以测量出飞机的姿态,很遗憾,陀螺仪会有积分漂移
导致积分偏差很大,这时候就需要加上加速度计,磁力计来校准,但是这三个传感器,都是各自的特性。
如果不做校准,那么飞机就不能准确的检测出姿态,导致飞机的飞行姿态不稳,同理飞机飞行过程中,
如果这桑格传感器受到干扰,也会导致姿态不稳,乃至飞机坠毁
陀螺仪
陀螺仪
-
存在积分偏移,时间一长陀螺仪就不准了
-
对IMU半导体 温度高敏感 受到温度影响较大
一般商业飞控会给陀螺仪和加速度计做恒温
加速度计
加速度计
磁力计
磁力计
(理论基础请参照陀螺仪的数据处理)
误差
当飞机静止不动水平时候
- 加速度计为(0,0,g )
- 磁力计指向一个固定方向
- 陀螺仪检测不到角速度
由于目前元器件制造工艺和安装方式,都会有误差,通过校准来尽可能消除误差,来确保检测出准确的姿态信息
加速度&陀螺仪
这是从MP地面站上查看的飞控静止情况下加速度计和陀螺仪的原始数据,或多或少都会有传感器噪声和零点漂移

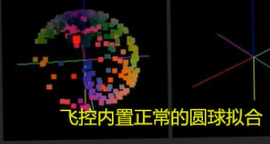
磁力计干扰测试

未受干扰前:
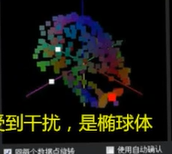
干扰后:
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)