无人机飞行模拟仿真平台设计
摘要:
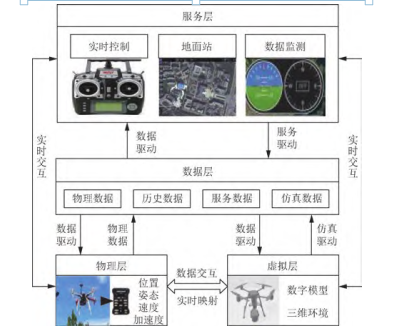
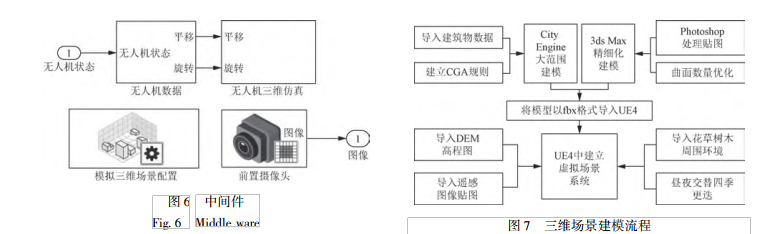
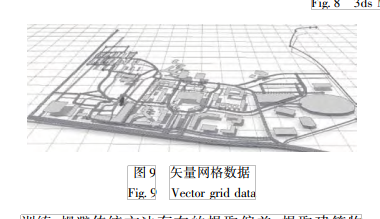
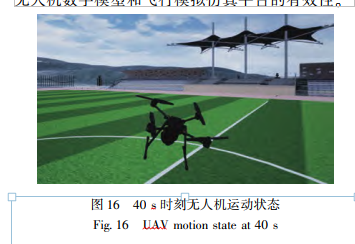
为提高飞行控制算法的研发效率,降低研发成本,基于数字孪生技术设计一个无人机硬件在环飞行模拟仿真平台。从几何、物理和行为3个方面研究无人机数字模型构建方法,将物理实体以数字化方式呈现。设计一种多元融合场景建模法,依据属性相似归一原则进行建筑物划分,编制建模规则,研究曲面数量优化方法,在虚幻4引擎(unrealengine4,UE4)中整合建筑物模型和高程图,创建真实地形地貌的三维可视化飞行场景。以四旋翼无人机F450为例,与飞行试验的对比结果表明,该平台满足了飞行模拟的实时性和稳定性要求,跟踪曲线误差小于2%,对后续控制算法优化和复杂应用场景试飞具有重要的应用价值。
摘要和关键词还是可以好好读一下 学习下怎么写
关键词
四旋翼;数字孪生;飞行模拟;多元融合;可视化仿真
引言:
引言 分为经典的三段
随着全球卫星定位系统、地理信息系统、遥感等技术的迅速发展,无人机除应用于传统的航拍摄影、农业植保、环境监测等领域,近年来还被广泛应用于地形测绘、物资运输、应急救援等领域[1]。无人机的功能和应用领域越来越广泛,实际飞行时所面临的环境也愈加复杂。无人机开发过程中常需对飞机性能和品质进行全面测试,在真实火场、灾区、人流量大等复杂环境中不仅难以进行,且要耗费大量人力和物力[2]。为了缩短研发周期,降低成本,研制一种能模拟复杂环境的沉浸式飞行模拟仿真平台就显得尤为重要。
这是第一段 介绍意义
近年来,国内外针对无人机飞行模拟仿真的研究开展了大量工作,主要采用数字仿真和半物理仿真。苏奔[3]设计无人机全数字仿真模型,仿真方法成本低、操作简单,但仿真数据可信度不高。郑航[4]用Simulink建立动力学模型,用六自由度实物转台实时展示四旋翼无人机真实飞行姿态,增强了数据可信度,能较真实模拟实际飞行状况,但缺乏视景仿真。蒋祎等[5]建立小型多旋翼无人机六自由度动力学模型和运动学模型,使用JMAVSim建立可视化半实物仿真系统。Xian等[6]用惯性导航传感器实物取代数字模拟传感器,构建飞行模拟仿真
平台,采用FlightGear和GoogleEarth可视化方法展示四旋翼无人机的方位和飞行轨迹。Nguyen等[7]开发了一个用于测试四旋翼无人机半实物仿真系统通信安全的中间件,用Gazebo软件实现四旋翼无人机模型的三维可视化。
这是第二段 ,xxx 做了 xxx
综上,目前无人机仿真技术主要围绕无人机的动力学和运动学模型进行构建,无人机可视化问题没有很好的解决,可视化仿真过程中使用的JMAVSim、FlightGear和Gazebo等仿真软件缺乏沉浸性和交互性,无法为复杂飞行控制算法研究提供有效支持。
这一段明显是为了写论文而写的,说别人不好的
现以四旋翼无人机为研究对象,依托数字孪生技术[8]建立揭示四旋翼动力特性的数字模型,研究基于虚幻4引擎(unrealengine4,UE4)的虚拟场景开发技术,在高度逼真的三维虚拟未知、复杂环境下测试无人机数字模型感知周围复杂环境及避障性能,为无人机航迹定位与跟踪算法优化控制研究提供平台支撑。
最后一段 ,自己研究的必要性
目录结构:
有的时候目录接是要比正文更加重要
- 1 无人机飞行模型仿真系统架构
- 2 F450 无人机数字模型
-
-
- 3 三维虚拟场景的映射
-
-
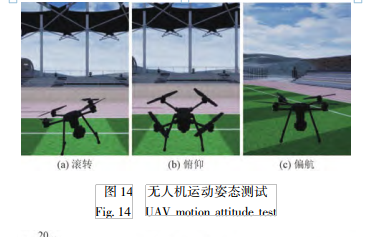
- 4 实验与性能分析
-
-
-
- 5 结论
配图

这些都是很容易实现的点,
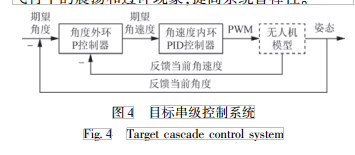
串级PID我决定可以给个公式 …
结论
然后看结论,好神奇,
虽然没人教过我怎么看论文
,但我的心告诉我
该怎么去看一篇论文
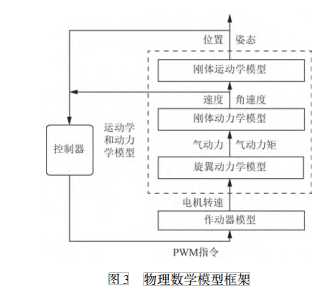
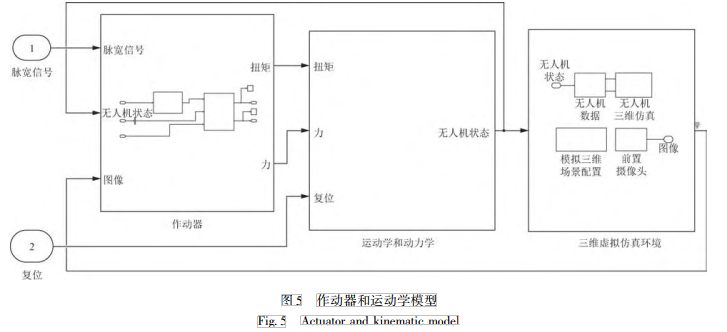
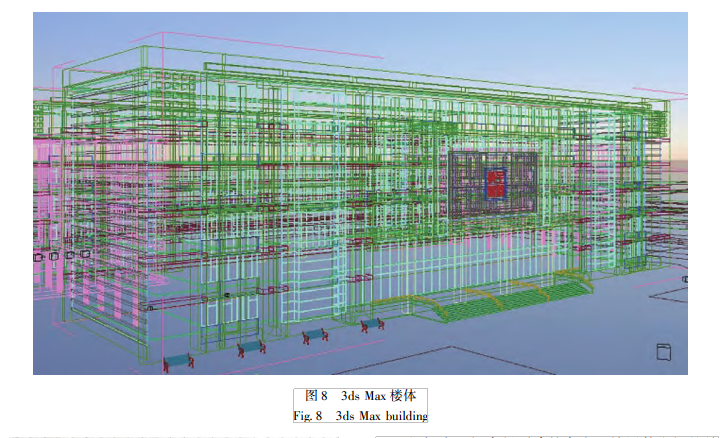
于UE4和MATLAB/Simulink从几何、物理和行为等方面构建的无人机数字模型,实现物理实体的数字化映射。针对传统单一3dsMax建模方法速
度过慢,提出的多元融合场景建模法,在UE4中实现了多种建筑物三维模型的整合,创建了真实地形地貌的三维虚拟仿真环境,经实验验证得出如下结论。
(1)虚拟场景沉浸性和交互性能良好,可为后期三维勘测、控制算法的优化和复杂应用场景试飞奠定基础平台。
(2)飞行实际曲线和期望曲线对比验证了无人机数字模型和飞行模拟仿真平台的有效性,数字模型能很好地执行遥控器姿态控制指令,飞行航迹与期望的航迹高度吻合。
因为你是做一个仿真平台,所以这些都是套话
公式
最后看公式,也是比较难的 需要理解的部分
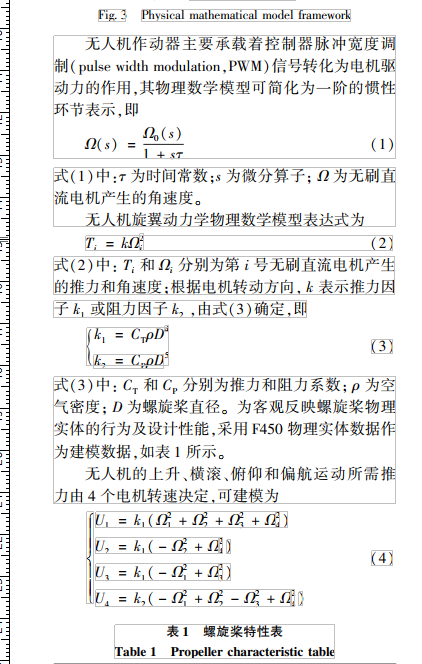
螺旋桨的动力公式
感觉这个公式不是很难
PWM -> 角速度
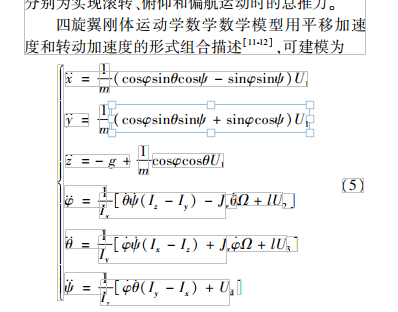
四旋翼刚体运动学数学数学模型
也不是很难
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)