我的笔记本电脑品牌是Acer,已经安装了win10系统,现在安装ubuntu18.04双系统。
我的boot是UEFI的(不是legacy),双硬盘(128G固态硬盘+1T机械硬盘)
主要参考如下:
《Windows10安装ubuntu18.04双系统教程》https://www.cnblogs.com/masbay/p/11627727.html
《win10下安装Ubuntu16.04双系统》https://blog.csdn.net/s717597589/article/details/79117112
我主要参考的是以上第一篇,注意要在固态硬盘分200M空间安装ubuntu的引导
遇到的问题有:
1、U盘启动盘插入电脑后,boot manager没有识别出U盘启动项
2、开机直接进入了windows系统,没有出现grub引导菜单
3、安装双系统后windows的系统时间错误
1、U盘启动盘插入电脑后,boot manager没有识别出U盘启动项
用软碟通(UltralSIO)或者rufus制作U盘启动盘,插入电脑后开机,按F12进入boot manager,却只显示windows boot manager,没有u盘启动项,如下(图源网)
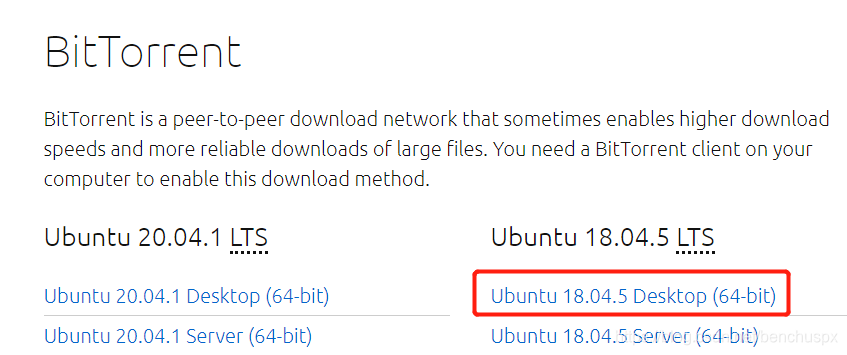
我的iso镜像文件是在ubuntu官网alternative downloads里的BitTorrent方式下载的
https://ubuntu.com/download/alternative-downloads
这是因为u盘里的ubuntu镜像文件(.iso)里没有引导程序(我也不知道为什么),就是没有syslinux引导程序。
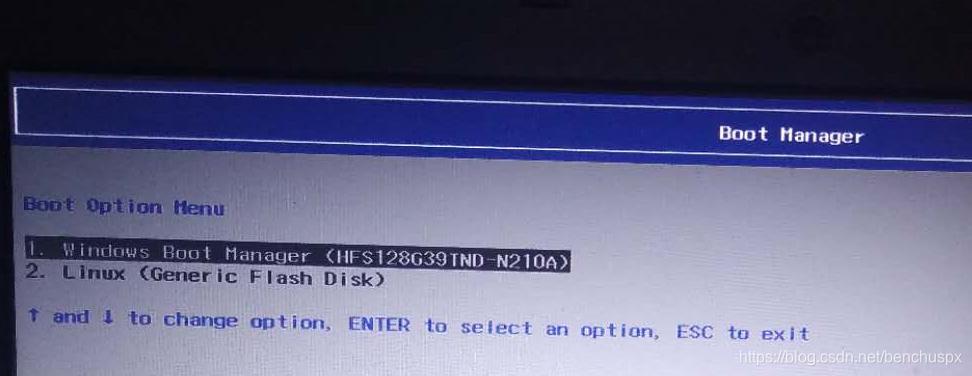
可以用两个u盘解决这个问题,一个专门烧录sysliux引导程序(大概50MB),另一个专门放ubuntu镜像文件(大概2G)。然后两个u盘同时插入电脑,按F2进入boot后修改首选启动方式为USB HDD,并在boot中打开F12进入boot manager的快捷键。重启开机,按F12进入boot manager,这时候就会显示那个专门烧录了syslinux引导程序的u盘。
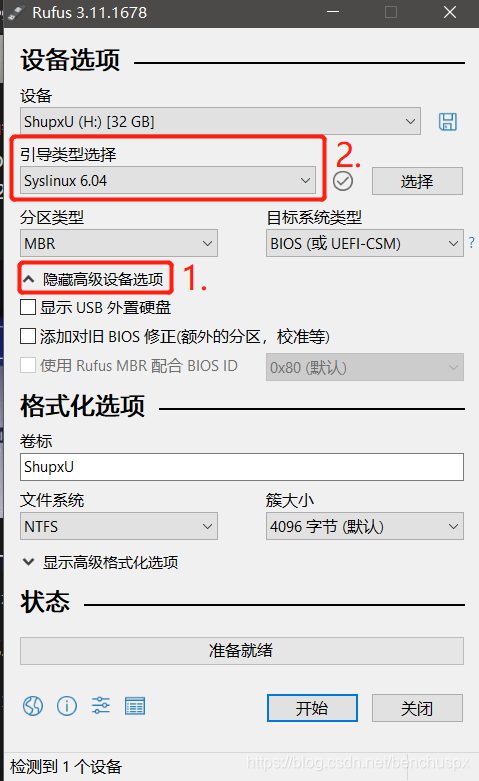
U盘文件系统我就用的是NTFS(无所谓)。制作含ubuntu镜像文件的U盘很简单,可以用UltralSIO-v9.6.2,也可以用rufus-3.11,我都试过。烧录syslinux引导程序我用的是refus-3.11,先打开高级设备选项,引导类型不选择镜像,而选syslinux 6.04,写入即可。
2、开机直接进入了windows系统,没有出现grub引导菜单
安装好ubuntu系统后重启,开机直接就进入了windows,没有让我选择是进入ubuntu还是win10呀!
这时候需要设置一下boot,信任ubuntu的grub引导程序,参考 https://blog.csdn.net/s717597589/article/details/79117112最后一段
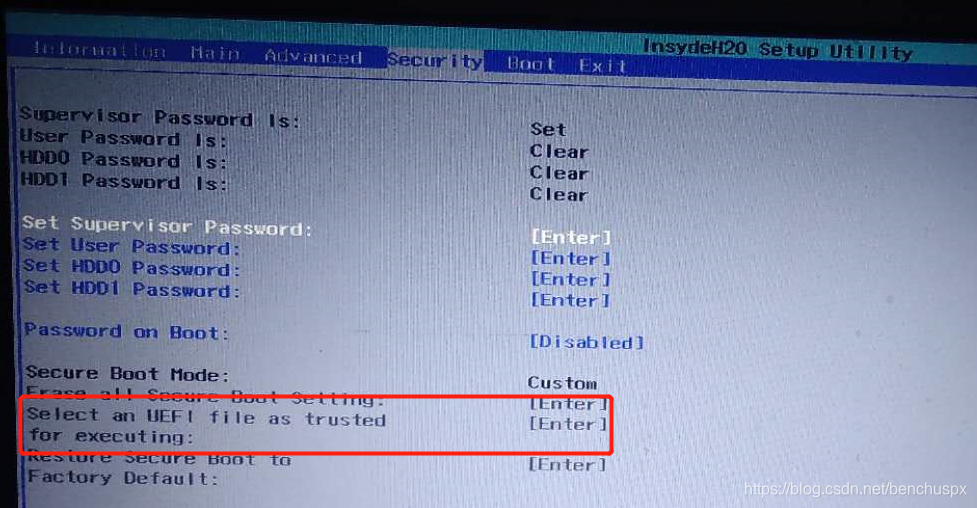
这里secrure boot mode是灰色的不能修改,可以在boot里切换一下UEFI / legacy模式,这个就能修改了,再换回UEFI,并禁用secure boot。
进去找到ubuntu的grub引导程序,起个名字,选择信任它。这时候在boot菜单下就会多出刚才信任的EFI选项,将它放到第一启动的位置,如下(我给它的命名是yes……,憨)
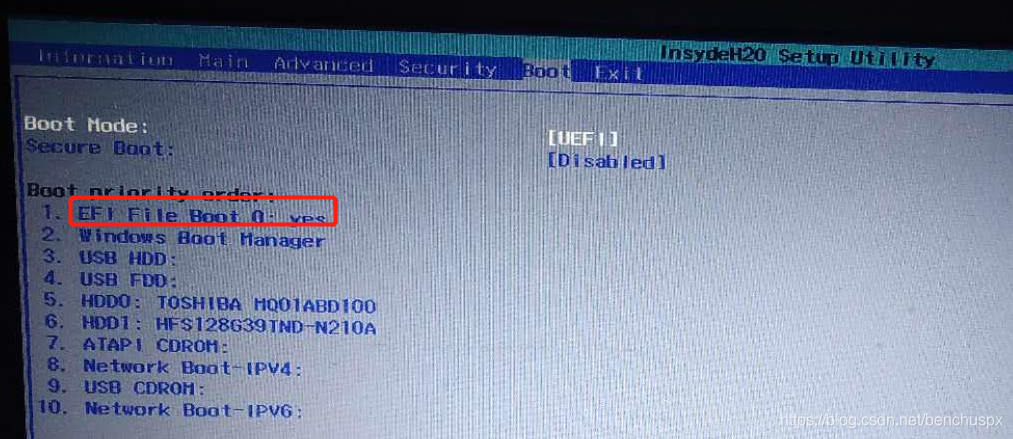
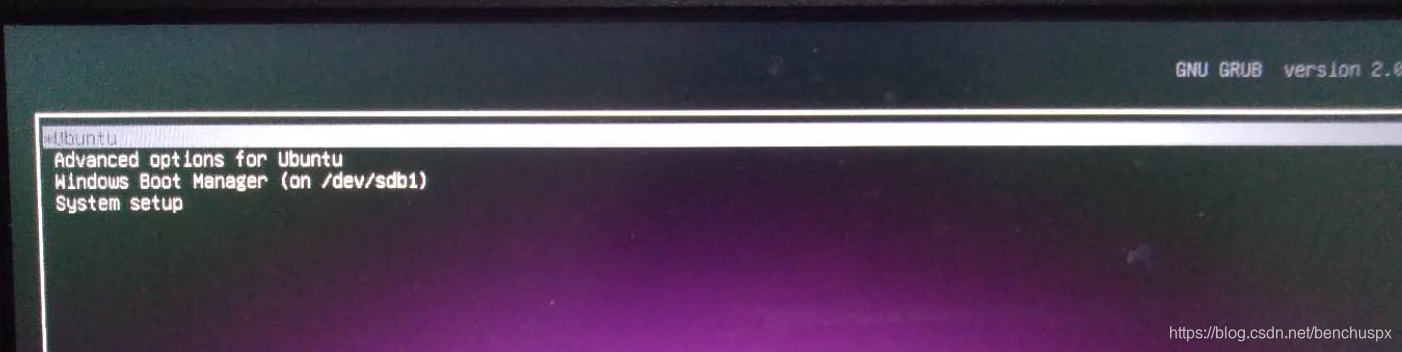
然后重启电脑,不用按任何键,就会显示grub选择菜单,可以选择进入ubuntu还是win10
3、安装双系统后windows的系统时间错误
安装ubuntu后,再开机进入windows,系统时间总是错的,每次都需要自己联网校准。一次性解决办法如下:
在win10系统中,cortana搜索框输入cmd,右键选择以管理员身份打开命令提示符,再输入以下代码:
Reg add HKLM\SYSTEM\CurrentControlSet\Control\TimeZoneInformation /v RealTimeIsUniversal /t REG_DWORD /d 1
(注意需要以管理员身份打开命令提示符,否则会拒绝操作)重启之后就可以了,亲测成功。
这个方法参考的是
https://zhidao.baidu.com/question/1769296084310599740.html?fr=iks&word=%B0%B2%D7%B0ubuntu%CB%AB%CF%B5%CD%B3%BA%F3win10%CF%B5%CD%B3%CA%B1%BC%E4%B4%ED%C1%CB&ie=gbk
祝大家都能顺利拥有自己的ubuntu双系统。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)