写在前面:本篇Blog仅作为学习笔记,学习内容来自于北邮CV-XUEBA团队的三维重建(精简版,鲁鹏)课程。
回顾经典2D变换

等距变换
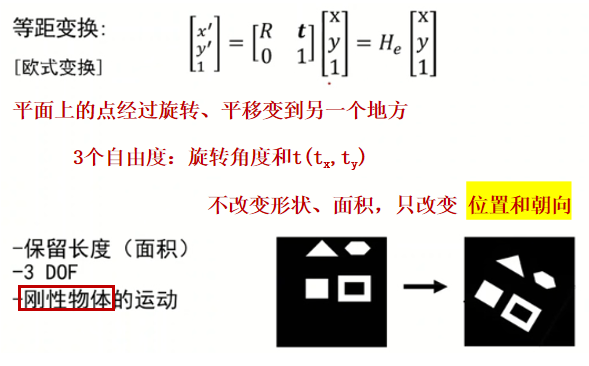
旋转矩阵(Rotate Matrix)的性质分析
证明:旋转矩阵是正交矩阵
相似变换

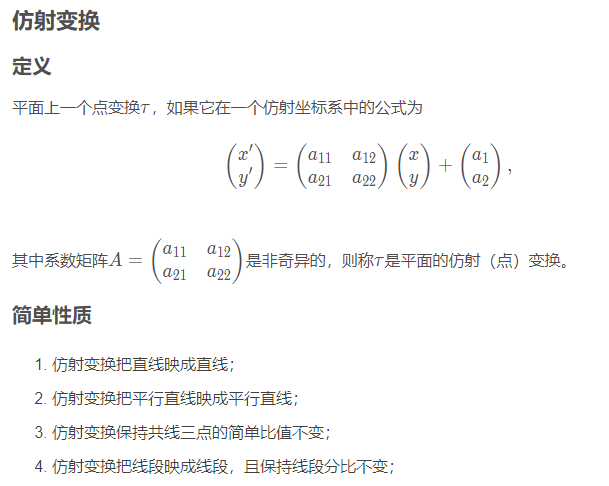
仿射变换
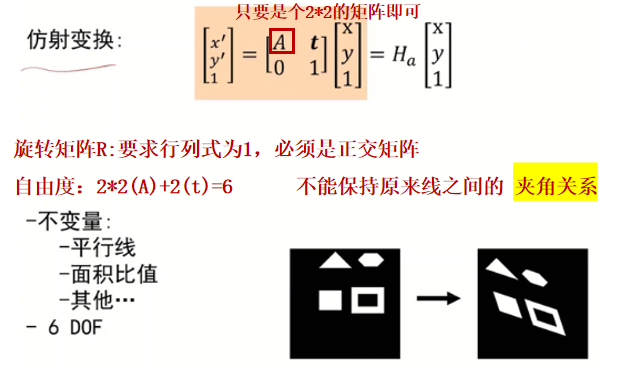
因为6个自由度,所以不共线的三对对应点就可以唯一确定一个仿射变换。
仿射变换在《解析几何》中的定义:
一个数学向的讲解Blog:平面与空间射影几何小结——平面射影几何
射影变换(透视变换)
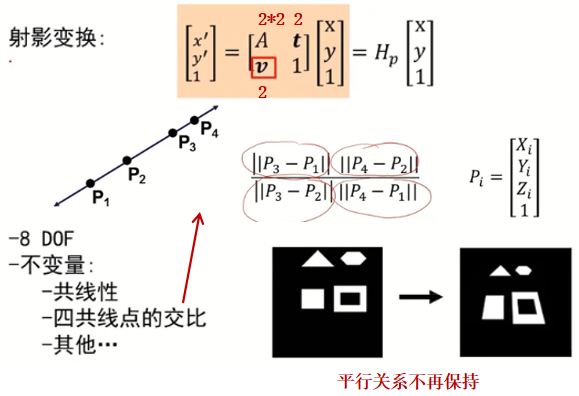
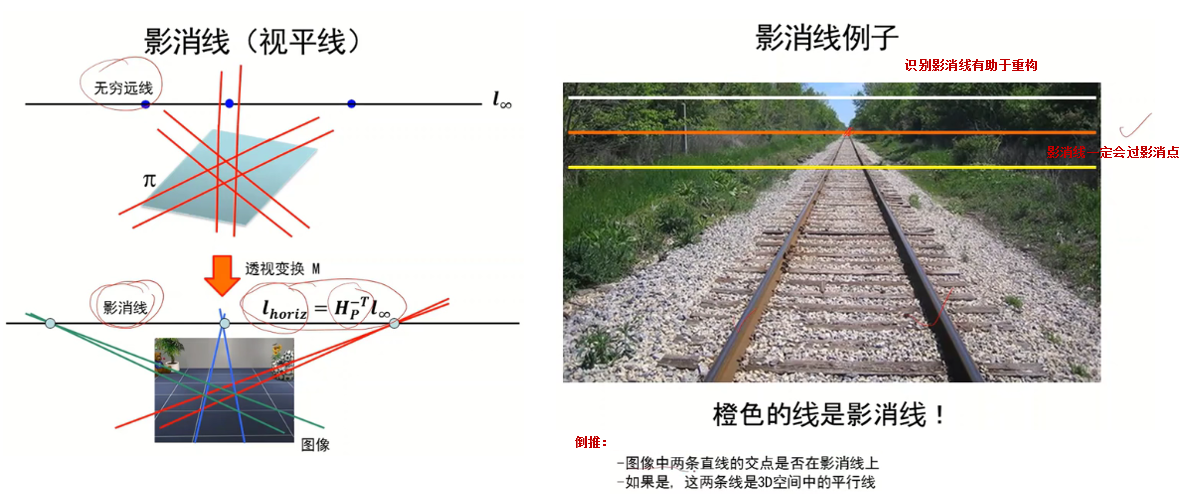
影消点与影消线
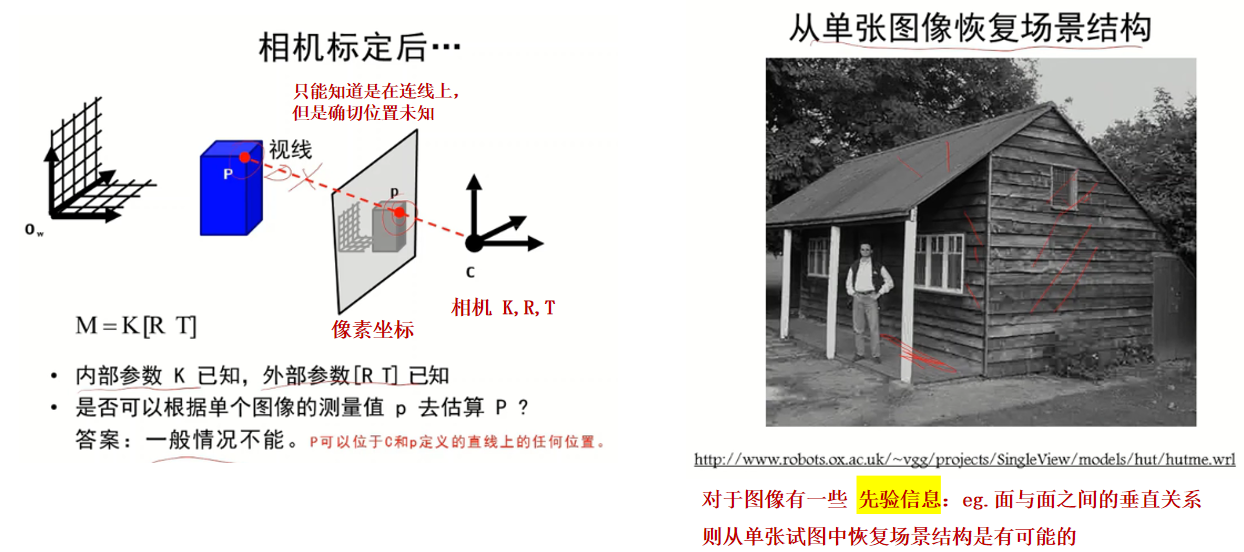
影消点和影消线与三维空间中的点存在着确定的 对应关系 ,再加上一些场景的 先验信息 就可以实现 单张图像的场景恢复 。
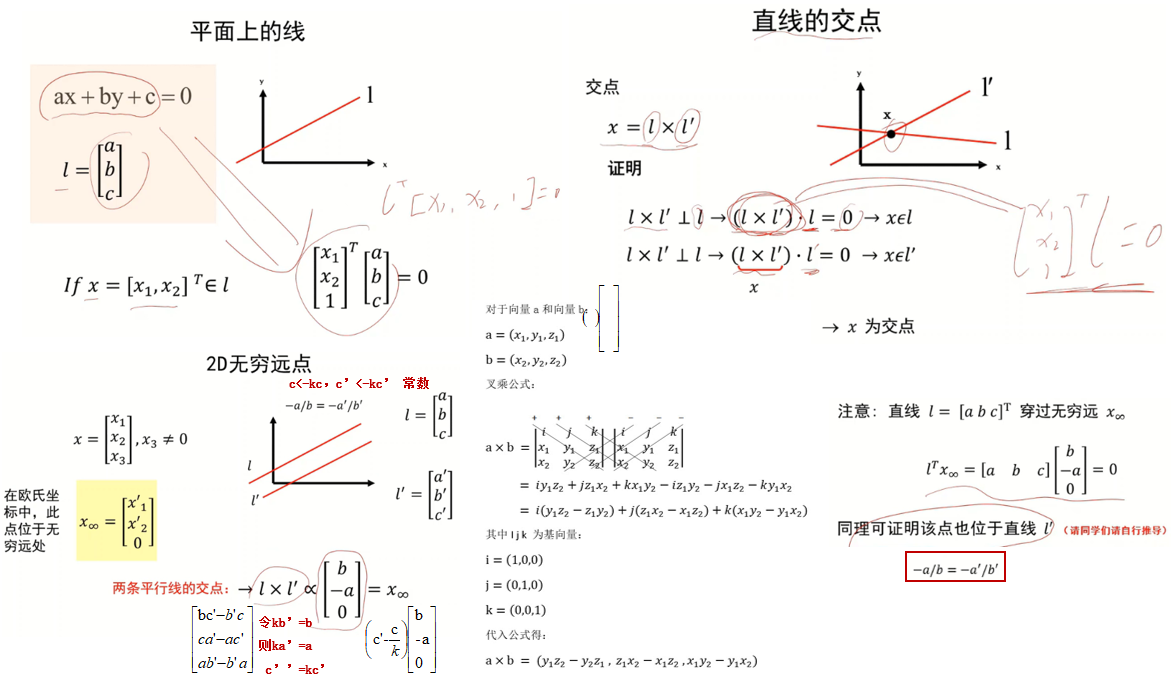
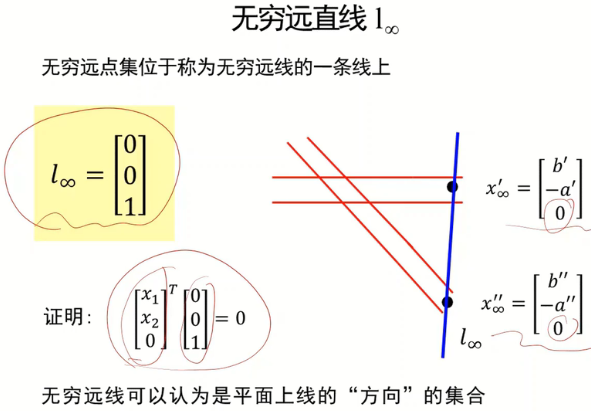
无穷远点和无穷远线
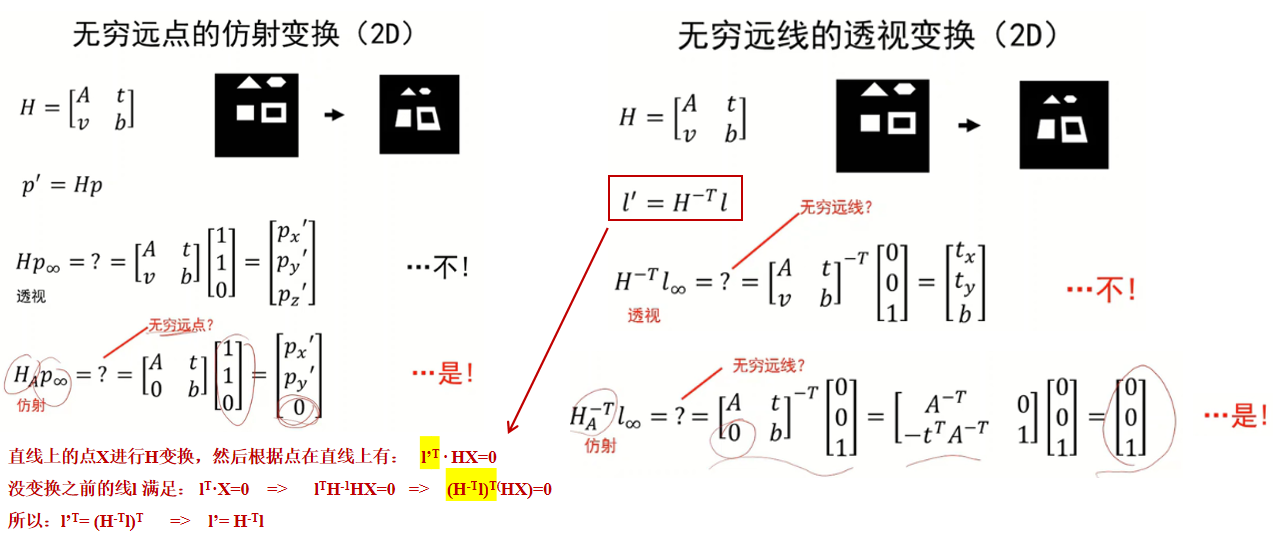
无穷远点和无穷远线的2D变换
三维空间中的点线面、影消点和影消线
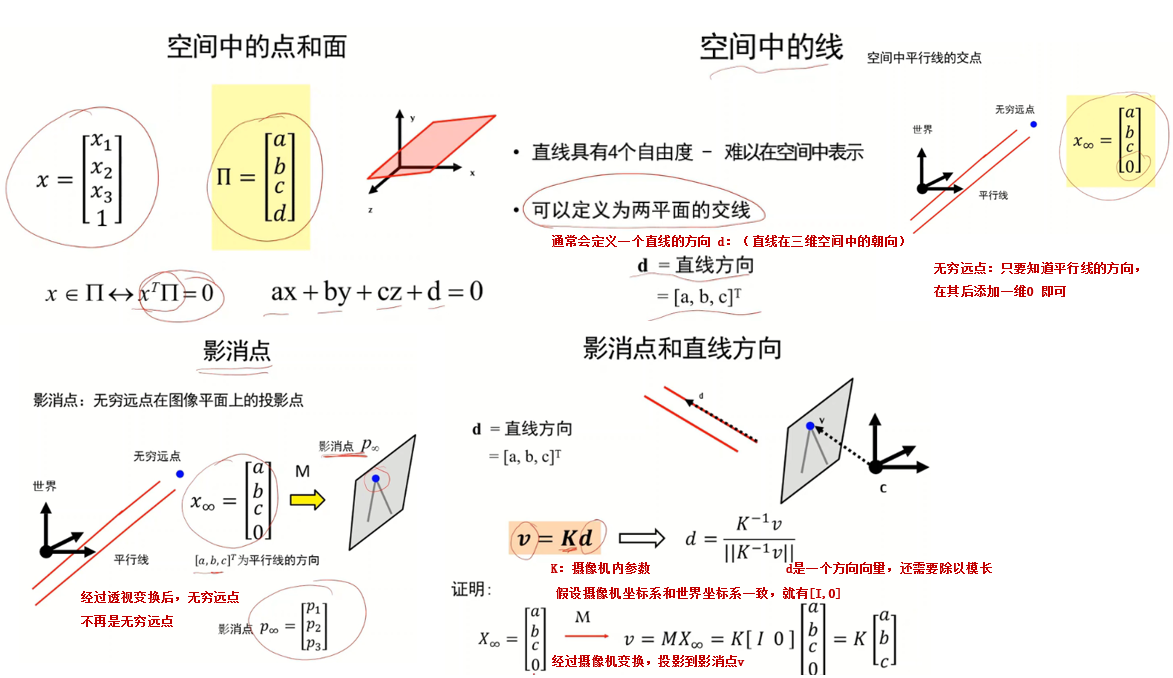
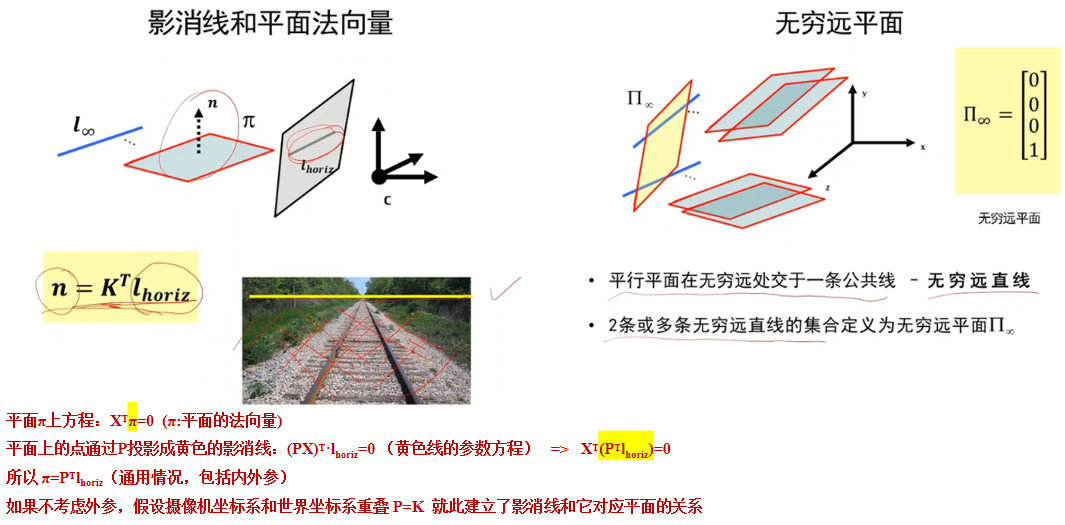
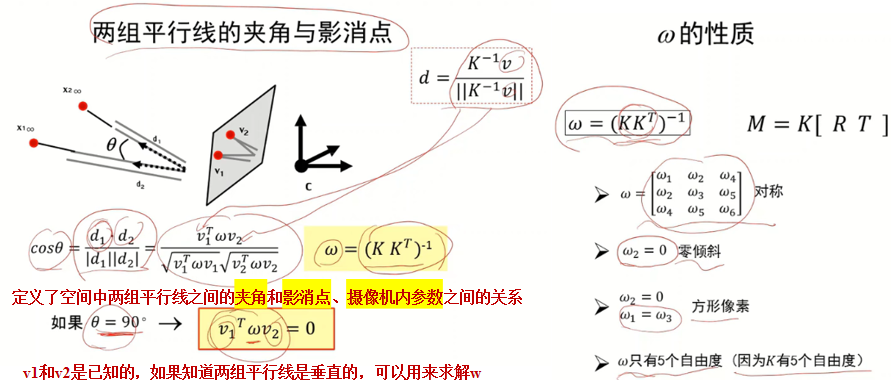
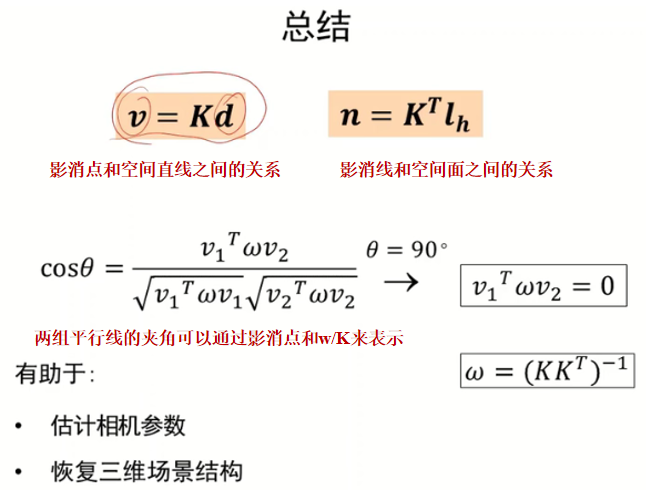
影消点、影消线与三维空间中的直线的方向与面的关系
重点
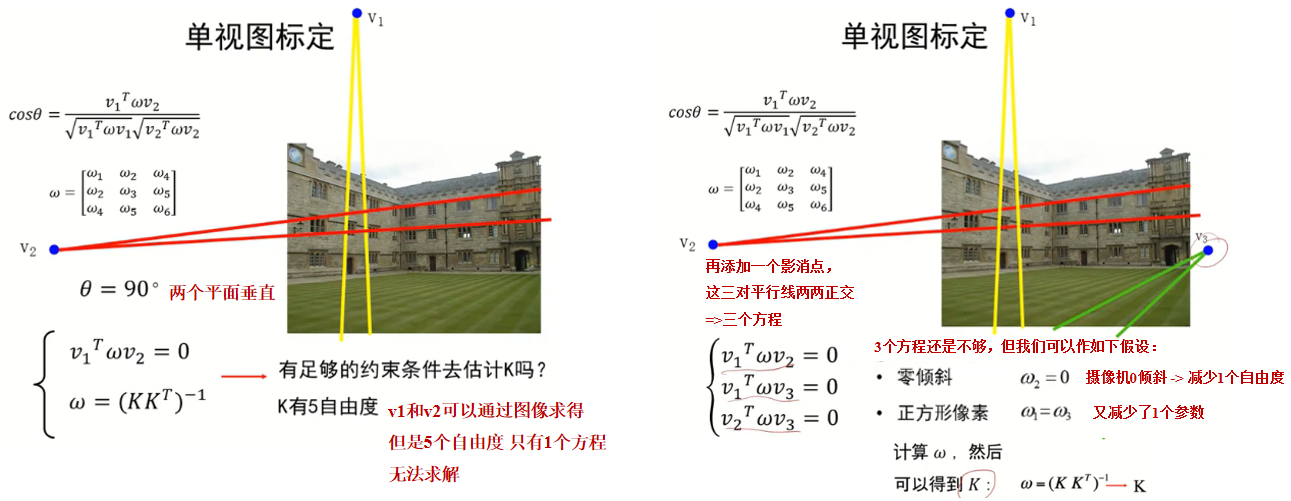
单视图重构
通过单视图标定摄像机的内参数
用内参数恢复三维场景的面信息
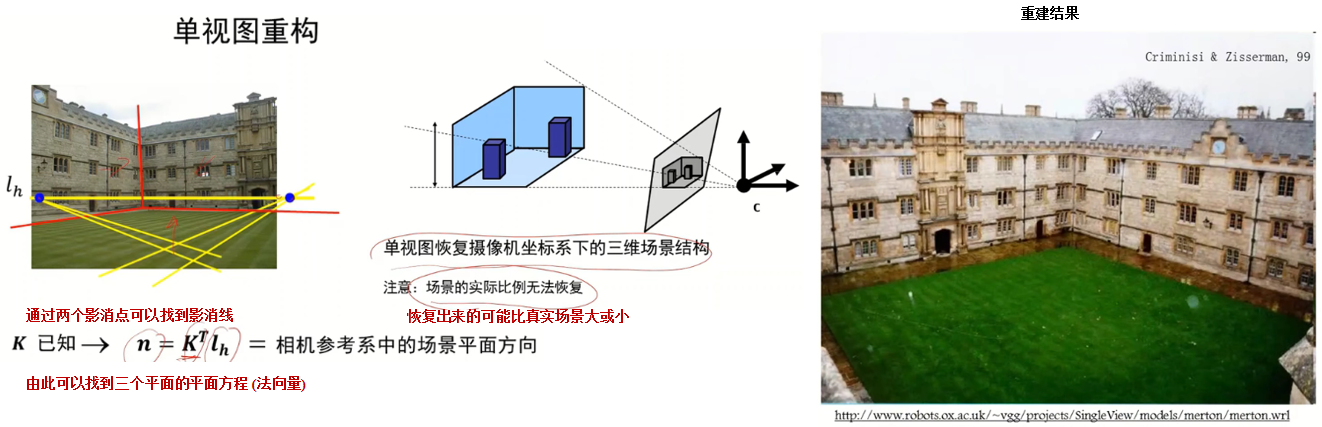
单视图重构评估
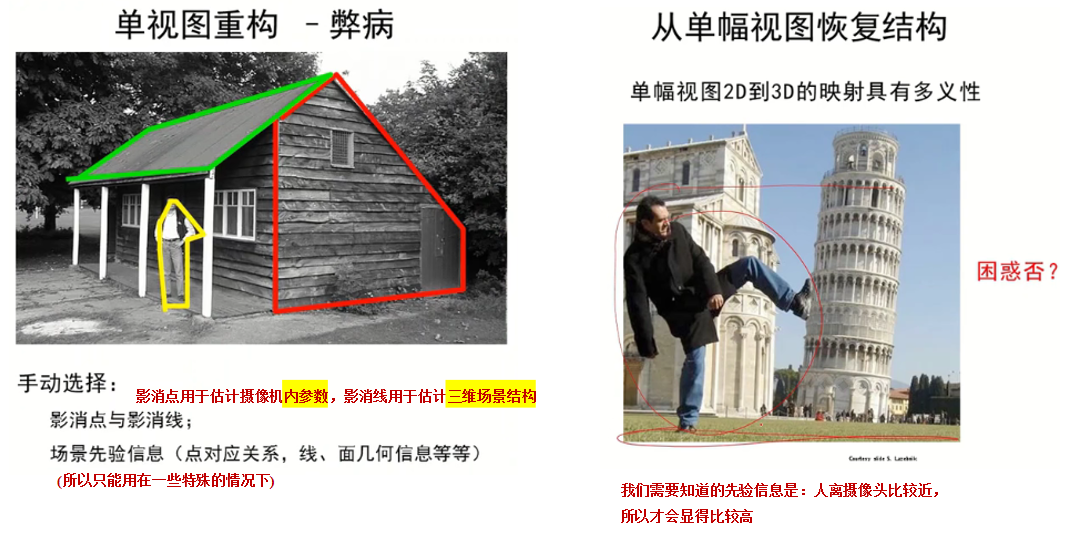
单视图重构不能恢复 真实的场景比例 。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)