改为双声道
修改dts文件
相关路径:
Y:\hxy\RK3308\sdk-1.5\kernel\arch\arm64\boot\dts\rockchipY:\hxy\RK3308\sdk-1.5\kernel\Documentation\devicetree\bindings\soundY:\hxy\RK3308\sdk-1.5\kernel\sound\soc\rockchip
通过指令grep -rin "rockchip,rk3308-multi-dais"查找相关文件
相关文件:
rk3308-evb-dmic-pdm-v13.dtsrockchip,multidais.txtrockchip_multi_dais.c
对以下部分进行修改:
pdm_i2s_dais: pdm-i2s-dais {
status = "okay";
compatible = "rockchip,rk3308-multi-dais", "rockchip,multi-dais";
dais = <&pdm_8ch>, <&i2s_8ch_2>;
- capture,channel-mapping = <6 2>;
+ capture,channel-mapping = <2 0>;
playback,channel-mapping = <0 2>;
bitclock-inversion = <1 0>;
};
把 <6 2> 改成 <2 0>
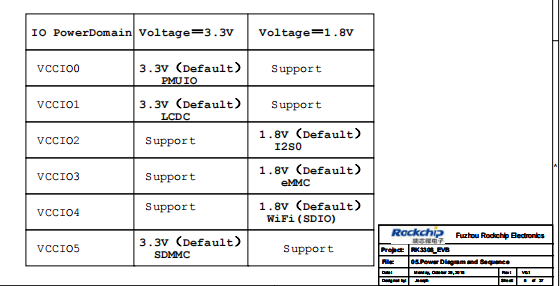
一开始SDK刚拿到的时候,在维持8声道配置时编出固件时,用 arecord 指令录不了音(录后拷贝出来发现数据容量很小),其原因就是 dts 文件中有一个vccio口没配置好:
&io_domains {
status = "okay";
vccio0-supply = <&vcc_io>;
vccio1-supply = <&vcc_io>;
- vccio2-supply = <&vcc_io>;
+ vccio2-supply = <&vcc_1v8>;
vccio3-supply = <&vcc_1v8>;
vccio4-supply = <&vcc_1v8>;
vccio5-supply = <&vcc_io>;
};
从 RK_EVB_RK3308_DDR3P116SD4_V13_20181029.pdf 文件中可以看到各 vccio 的作用:
了解asound.conf的作用
路径:Y:\hxy\RK3308\sdk-1.5\buildroot\board\rockchip\rk3308\fs-overlay\etc
一开始查找路径时找到以下4个路径:
Y:\hxy\RK3308\sdk-1.5\buildroot\output\rockchip_rk3308_release\target\etcY:\hxy\RK3308\sdk-1.5\buildroot\output\rockchip_rk3308_64_dueros\target\etcY:\hxy\RK3308\sdk-1.5\buildroot\board\rockchip\rk3308\fs-overlay\etcY:\hxy\RK3308\sdk-1.5\buildroot\board\minnowboard\fs-overlay-graphical\etc
相关文件:asound.conf 和 Asound_Configuration_CN.pdf
录音增益
增益补丁包patch
路径:Y:\hxy\RK3308\sdk-1.5\buildroot\package\alsa-lib
文件:0005-add-gain-for-audio-input.patch,补丁包来着,这个其实已经过时了,里面要求改的 RK 默认的 pcm.c 就已经改好了,如果按照patch包的改法的话,有如下新增:
- 1171行的
static void add_gain_rk_16(void* pIn,int length, int channels) - 1205行的
static void add_gain_rk_32(void* pIn,int length, int channels) - 2096行的
add_gain_rk_16((void*)buffer, tmp * pcm->frame_bits / pcm->sample_bits, pcm->channels);函数 - 2103行的
add_gain_rk_32((void*)buffer, tmp * pcm->frame_bits / pcm->sample_bits, pcm->channels);函数
patch格式解析:参考链接01 参考链接02
patch包的一些内容解析如下:
diff --git a/src/pcm/pcm.c b/src/pcm/pcm.c
index 9c90afb..281fbe3 100644
--- a/src/pcm/pcm.c ##原文件,a是原文件对应的目录
+++ b/src/pcm/pcm.c ##修改后的文件,b是对应目录,可通过下级目录找到这个文件
下面表示@@-旧文件开始行数,旧行数 +新文件开始行数,新行数@@;旧文件从825行的void DCBDoing开始,共6行;新文件也从825行开始,共23行:
@@ -825,6 +825,23 @@ void DCBDoing(void* pIn, int length, int channels)
}
}
#endif
+void add_gain(void* pIn, int length, int channels)
+{
+ int i = 0;
+ int16_t * pInBuf = (int16_t *)pIn;
+ char *alsa_gain_level = getenv("ALSA_LIB_ADD_GAIN");
+ if(alsa_gain_level) {
+ int level = atoi(alsa_gain_level);
+
+ for(i = 0; i < length; i ++ ) {
+ int curChannel = i % channels;
+ if(curChannel < channels - 2 ) {
+ (*pInBuf) <<= level;
+ }
+ pInBuf++;
+ }
+ }
+}
修改pcm.c
路径:Y:\hxy\RK3308\sdk-1.5\buildroot\output\rockchip_rk3308_release\build\alsa-lib-1.1.5\src\pcm
在8声道的时候,录音得到的声音很小,有添加录音增益补丁之后,在控制台上输入指令export ALSA_LIB_ADD_GAIN=4才能实现录音增益;在刚修改完为双声道的时候,遇到了在控制台上输入上面指令失效的问题,这时候还要对 pcm.c 进行修改(notepad++快速跳转到某行的快捷方法:Ctrl+G):
1.2090行,snd_pcm_readi函数中有这样的一个判断条件:
if(pcm->channels != 2 && tmp > 0){...}
改为以下:
if(pcm->channels <= 2 && tmp > 0) {...}
2.增加一个2089行中一个printf信息如下:
printf("dcb size=%d,tmp=%d,sam_bits=%d,framebits=%d,format=%d,channels=%d,\n",size,tmp,pcm->sample_bits,pcm->frame_bits,pcm->format,pcm->channels);
3.注释掉add_gain_rk_16函数和add_gain_rk_32函数中的判断条件:
if(curChannel < channels - 2 ) {...}
并各增加以下语句:
printf("rk_16 channels:%d level:%d \n",channels,level);
printf("rk_32 channels:%d level:%d \n",channels,level);
- 改完之后,要到
cd work/hxy/RK3308/sdk-1.5/buildroot/output/rockchip_rk3308_release/下执行 make alsa-lib-rebuild 命令 - 试过在
Y:\hxy\RK3308\sdk-1.5\buildroot\output\rockchip_rk3308_release\build\alsa-lib-1.1.5\src\pcm下进行make,但没有效果
mic硬件电路图
相关文件:EVB_CN.pdf
mic规格:MSM261D4030H1CPM
6+0+2 麦克风阵列方案说明
圆形麦克风阵列,对于不同的麦克风位置,可实现不同的通道组合,例如下图的方案,等间距布置在圆周上的6个麦克风
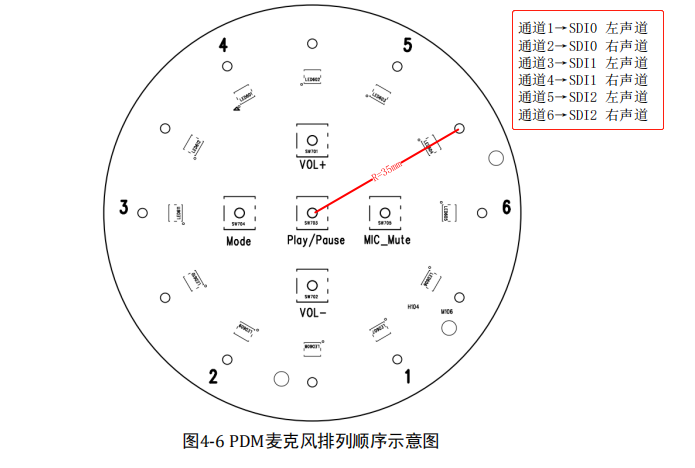
在本麦克风阵列方案中,圆周阵列麦也可设计用来做语音唤醒功能,因此不需要单独的唤醒麦。同时,为获得更好的回声消除效果,在左右声道喇叭网络上,通过主控自带的ADC将输出端的音频信号回采,这样的回采方式能最贴近喇叭播放的实际效果。
因此6+0+2麦克风阵列的含义是:6个圆周麦克风(capture)、0个唤醒麦、2路回采(playback)音频信号。
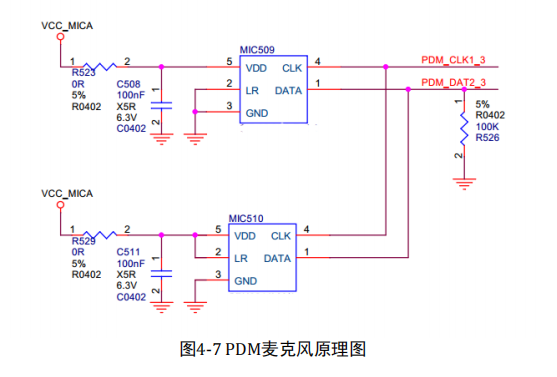
PDM麦克风原理图
电路中,每2个数字麦对应一个PDM_SDI信号,如下图,因此6个麦需要使用3个SDI信号:
连接座
FPC:Flexible Printed Circuit,挠性印刷电路
麦克风阵列子板通过30Pin_0.5mm间距的FPC线与RK3308_EVB主板连接,其接口定义如下:
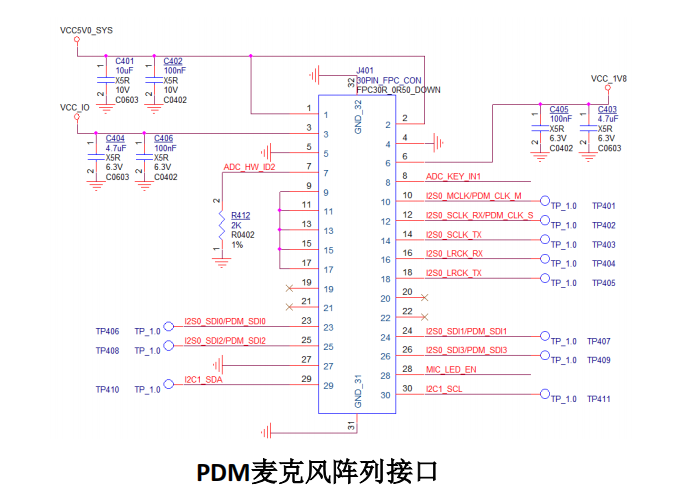
PDM麦克风对应的PCB板丝印为: RK_EVB_DMIC-PDM_6C70_V11_20180427J
控制台console试验
录音arecord试验
1.先使用以下3个指令:
export ALSA_LIB_ADD_GAIN=4arecord -Dhw:0,0 -c 2 -r 8000 -f S16_LE /data/test01.wavaplay /data/test01.wav
使用以下printf 出的 log 信息如下(后面再源代码中注释掉了):
rk_16 channels:2 level:3
dcb size=1000,tmp=1000,sam_bits=16,framebits=32,format=2,channels=2,
改了文件系统类型试验
2.若文件系统类型改为ext2类型的话,会导致aplay无法播放音频,arecord能录到(有push出来进行试听)
dts参数修改意义的试验
问题1:capture,channel-mapping = <2 0>; 是不是意味着只用了6个mic中的2个,具体是哪两个?
答:通过物理试验,在麦上触摸会发出刺耳的声音,从而判断出是mic1和mic2。
问题2:用了 mic1 和 mic2,实际的录音是取的哪个mic的数据?是哪个mic声音大取哪个?还是合一起了?还是我们这边软件自己选取的?
答:通过音源离mic远近进行播放,听左右喇叭播出的声音有啥不同,如果是合成的,那两个喇叭播出来的声音应该是一样的,实际上并不是,而是 mic1 和 mic2 对应喇叭的左右声道。
问题3:手册上说PDM支持8路录音是什么意思?因为这里只有6个麦,对应只有6路才对,另外两路是干嘛的?
答:有可能另外两路是模拟mic,或者是其他输入源,如耳机。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)