1)error: 'nullptr' was not declared in this scope
解决方法:使用的是QTcreator的pro文件,然后缺少相应关于c++11的设置,点pro文件中加载的东西如下:
QMAKE_CXXFLAGS += -std=c++11
2)error: undefined reference to `google::LogMessageFatal::LogMessageFatal(char const*, int)'
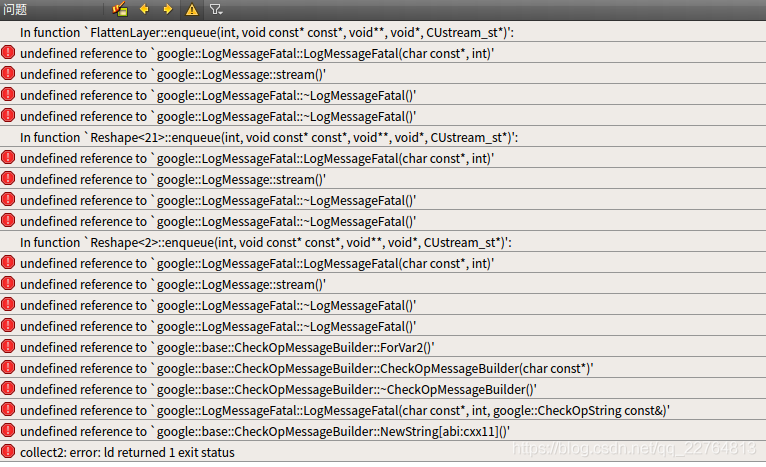
处理方法:该错误是我在调用cmake对代码进行编辑时出现的错误,后面得出的原因是没有在CMakelists.txt中加载相应的glog的库,怎样加入了:
include_directories(/usr/include/glog)
target_link_libraries(inferLib /usr/lib/x86_64-linux-gnu/libglog.so)
上面两句话到底是什么含义可以进行cmake语句的百度.这里也有一个很好的文档:<cmake实践>
3)Qt无法正常进行DEBUG(This does not semm to be a "Debug"build)
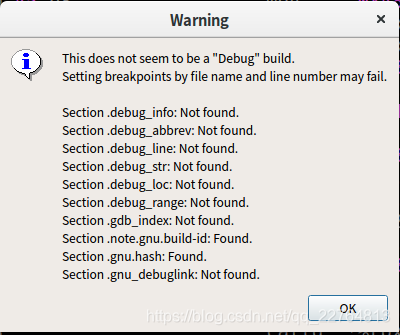
处理方法:
在CMakeLists.txt中加入:
SET(CMAKE_BUILE_TYPE DEBUG) #编译出来的程序可用于调试
如果还是不行,就这样处理:
在cmake时加入下面这句话:-DCMAKE_BUILD_TYPE=Debug
-DCMAKE_BUILD_TYPE=Debug
如下图所示:
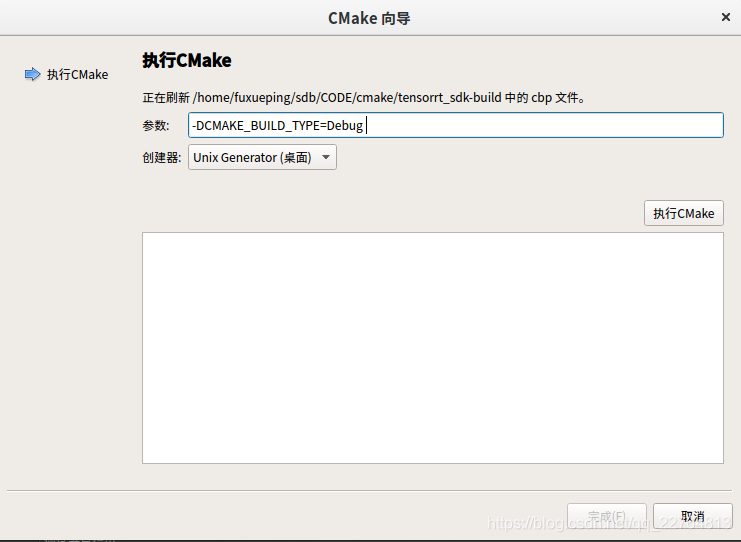
然后"执行CMake",这样就可以正常的进行调试了.
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)