rosdep 初始化时异常解决方案
rosdep 初始化时异常解决-视频教程
安装构建依赖
在 noetic 最初发布时,和其他历史版本稍有差异的是:没有安装构建依赖这一步骤。随着 noetic 不断完善,官方补齐了这一操作。
首先安装构建依赖的相关工具
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
ROS中使用许多工具前,要求需要初始化rosdep(可以安装系统依赖) – 上一步实现已经安装过了。
sudo apt install python3-rosdep
初始化rosdep
sudo rosdep init
rosdep update
如果一切顺利的话,rosdep 初始化与更新的打印结果如下:


但是,在 rosdep 初始化时,多半会抛出异常。
问题:
原因:
境外资源被屏蔽。
解决:
百度或google搜索,解决方式有多种(https://github.com/ros/rosdistro/issues/9721),可惜在 ubuntu20.04 下,集体失效。
新思路:将相关资源备份到 gitee,修改 rosdep 源码,重新定位资源。
实现:
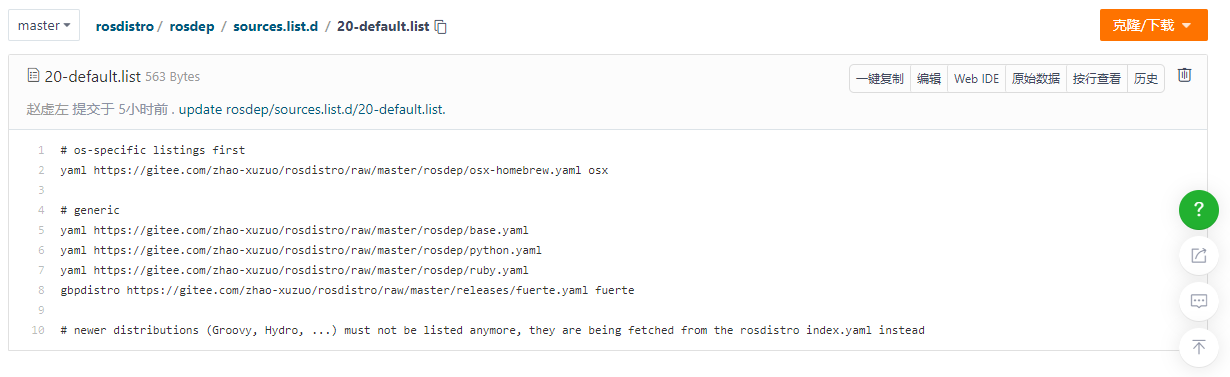
1.先打开资源备份路径:https://gitee.com/zhao-xuzuo/rosdistro,打开 rosdistro/rosdep/sources.list.d/20-default.list文件留作备用(主要是复用URL的部分内容:gitee.com/zhao-xuzuo/rosdistro/raw/master)。
2.进入"/usr/lib/python3/dist-packages/" 查找rosdep中和raw.githubusercontent.com相关的内容,调用命令:
cd /usr/lib/python3/dist-packages
find . -type f | xargs grep "raw.githubusercontent"

3.修改相关文件,主要有: ./rosdistro/init.py、./rosdep2/gbpdistro_support.py、./rosdep2/sources_list.py 、./rosdep2/rep3.py。可以使用sudo gedit命令修改文件:
sudo gedit ./rosdistro/__init__.py
sudo gedit ./rosdep2/gbpdistro_support.py
sudo gedit ./rosdep2/sources_list.py
sudo gedit ./rosdep2/rep3.py
文件中涉及的 URL 内容,如果是:raw.githubusercontent.com/ros/rosdistro/master都替换成步骤1中准备的gitee.com/zhao-xuzuo/rosdistro/raw/master即可。







修改完毕,再重新执行命令:
sudo rosdep init
rosdep update

就可以正常实现 rosdep 的初始化与更新了。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)