参考网页:http://blog.csdn.net/nemol1990/article/details/45131603
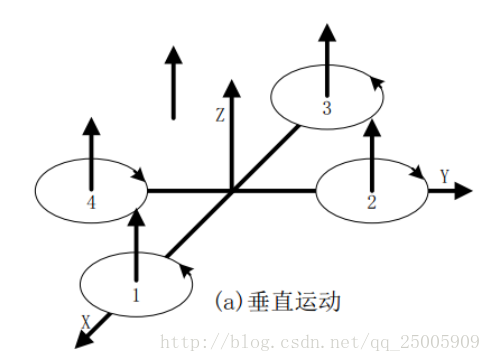
一、上下运动
- 向上运动,四个轴的速度同时增加
- 向下运行,四个轴的速度同时减小
二、前后运动
- 2和4电机的转速不变,减小1的转速,增大3的转速,向前运动,增大1的转速,减少3的转速,向后运动。
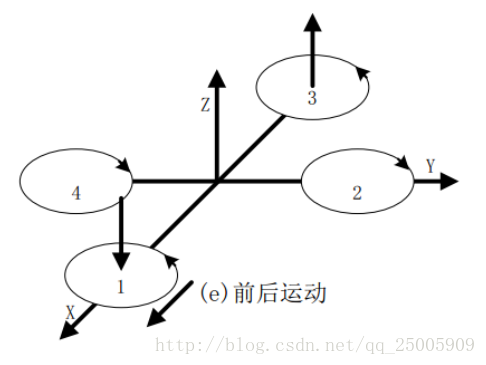
- 往前运动时,1的拉力下降,3的拉力上升,四轴前倾,pitch的值增大
- 往后运动时,1的拉力上升,3的拉力下降,四轴后倾,pitch的值变小

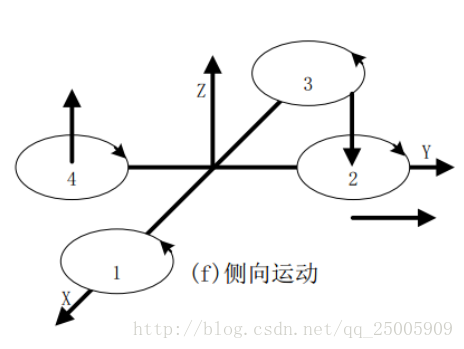
三、侧向运动
原理与前后运动相同,1,3电机转速保持不变,增大4减少2向右侧运动,增大2而减小4向左侧运动
- 向右侧运动,2的拉力下降,4的拉力上升,向右侧倾斜,roll的值增大
- 向左侧运动,2的拉力上升,4的拉力下降,向左侧倾斜,roll的值减小(例如:从0减到-45)
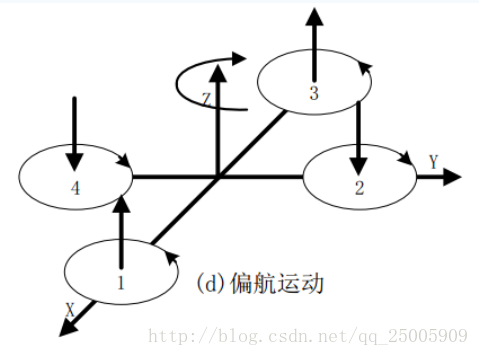
四、左转右转
- 顺时针旋转(右转) 1、3电机转速上升,2、4电机转速下降,yaw增大
- 逆时针旋转(左转) 1、3电机转速下降,2、4电机转速上升,yaw减小
五、串级PID
roll :
- rollAttitudePidSettings :外环– 横滚(roll)角度pid设置
- rollRatePidSettings :内环–横滚(roll)角速度pid设置
pitch :
- pitchAttitudePidSettings :外环 – 俯仰(pitch)角度pid设置
- pitchRatePidSettings : 内环 – 俯仰(pitch)角速度pid设置
yaw:
- yawAttitudePidSettings : 外环 – 航向(yaw)角度pid设置
- yawRatePidSettings : 内环 – 航向(yaw)角速度pid设置
上下运动
设置 roll和pitch的期望角度都为0
保持yaw的期望角度与之前一致
前后运动
设置roll的期望角度为0
设置pitch的期望角度为一个设定值
保持yaw的期望角度与之前一致
侧向运动
设置pitch的期望角度为0
设置roll的期望角度为一个设定值
保持yaw的期望角度与之前一致
左转右转
设置roll,pitch的期望角度为0
设置yaw的期望角度为一个设定值
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)