向量的叉乘和点乘
在我们的mc_att_control中有我们的向量的点乘和叉乘,一般遇到的都是三维的运算(
SO(3)
S
O
(
3
)
李群).
向量点乘:假设向量
a⃗ =[a1,a2,a3]
a
→
=
[
a
1
,
a
2
,
a
3
]
和
b⃗ =[b1,b2,b3]
b
→
=
[
b
1
,
b
2
,
b
3
]
,则有:
a⃗ ⋅b⃗ =a1b1+a2b2+a3b3=|a⃗ ||b⃗ |cosθ
a
→
⋅
b
→
=
a
1
b
1
+
a
2
b
2
+
a
3
b
3
=
|
a
→
|
|
b
→
|
c
o
s
θ
向量叉乘:假设向量
a⃗ =[a1,a2,a3]
a
→
=
[
a
1
,
a
2
,
a
3
]
和
b⃗ =[b1,b2,b3]
b
→
=
[
b
1
,
b
2
,
b
3
]
,则有:
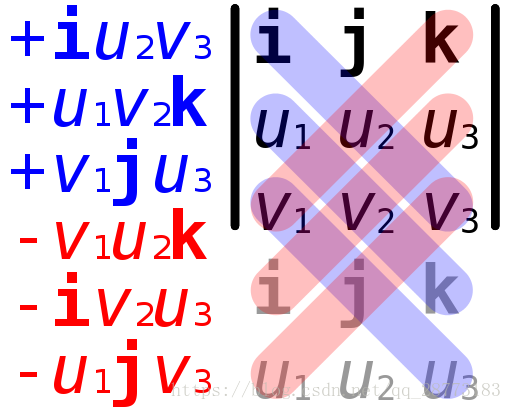
a⃗ ×b⃗ =(a2b3−a3b2)i+(a3b1−a1b3)j+(a1b2−a2b1)k=|a⃗ ||b⃗ |sinθ
a
→
×
b
→
=
(
a
2
b
3
−
a
3
b
2
)
i
+
(
a
3
b
1
−
a
1
b
3
)
j
+
(
a
1
b
2
−
a
2
b
1
)
k
=
|
a
→
|
|
b
→
|
s
i
n
θ
从上面的定义式也可以理解为什么我们常用向量的叉乘表示偏差,假设两个向量没有偏差,则其夹角为0,那么其正弦也就为0.三维向量叉乘也可由下面的图计算:
Throttle PID Attenuation(TPA)
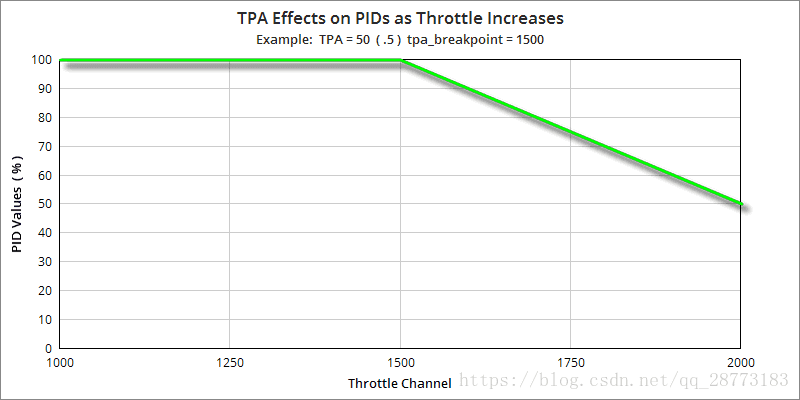
简单的来说,相对于全油门,TPA应用PID值降低。当达到全油门时,它用于应用PID值的衰减,以此消除振荡。其有两个最重要的参数:tpa和tpa_breakpoint,其中tpa是缩放系数,tpa_breakpoint是开始缩放的阈值.
举个例子,tpa=50(%),tpa_breakpoint=1500(我们知道飞机的PWM在1000-2000之间),如下图所示:
- 当油门>1500时开始衰减
- 当油门到达1750时,PID衰减25%
- 当油门到达2000(全油门)时,PID衰减50%
对于TPA能消除振荡,简单的写个matlab就可以直观的看出来,运行结果如下:
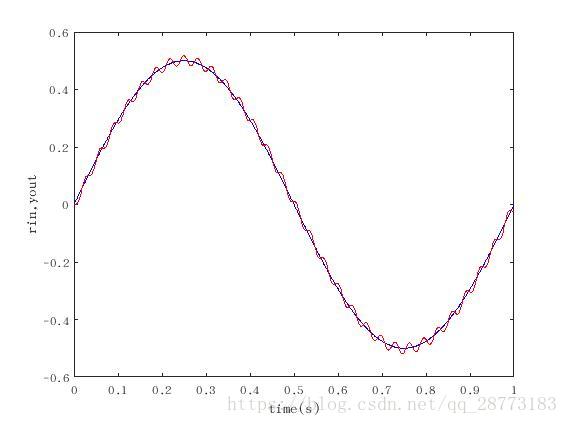
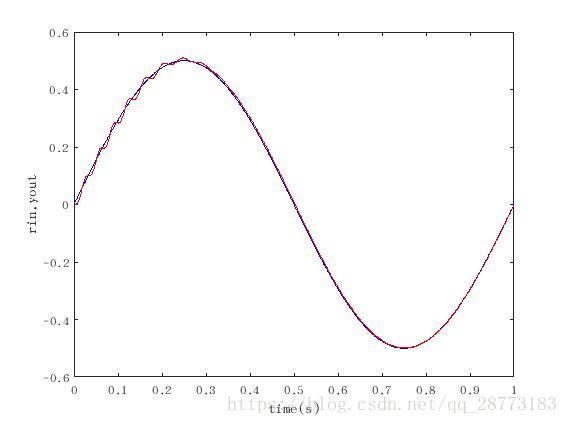
程序如下:
clear all;
close all;
tpa=0.5,tpa_breakpoint=0,25;
kp_cst=100;ki_cst=0.1;kd_cst=10;
kpp=kp_cst;kii=ki_cst;kdd=kd_cst;
ts=0.001;
sys=tf(50,[0.125,7, 0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
u_1=0.0;
u_2=0.0;
y_1=0.0;
y_2=0.0;
x=[0,0,0]';
error_1=0;
error_2=0;
for k=1:1:1000
time(k)=k*ts;
S=2;
if S==1
kp=50;ki=0.1;kd=15;
rin(k)=1;
elseif S==2
kp=kpp;ki=kii;kd=kdd;
rin(k)=0.5*sin(2*pi*k*ts);
end
du(k)=kp*x(1)+kd*x(2)+ki*x(3);
u(k)=u_1+du(k);
if u(k)>=5
u(k)=5;
end
if u(k)<=-5
u(k)=-5;
end
yout(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;
error(k)=rin(k)-yout(k);
if yout(k)>0.25
kpp=kp_cst-2*kp_cst*(yout(k)-0.25);kii=ki_cst ;kdd=kd_cst ;
else
kpp=kp_cst;kii=ki_cst;kdd=kd_cst;
end
u_2=u_1;
u_1=u(k);
y_2=y_1;
y_1=yout(k);
x(1)=error(k)-error_1;
x(2)=error(k)-2*error_1+error_2;
x(3)=error(k);
error_2=error_1;
error_1=error(k);
end
figure(1);
plot(time,rin,'b',time,yout,'r');
xlabel('time(s)'),ylabel('rin,yout');
轴角法和罗德里格斯旋转推导
轴角法:简单的来说,用单位向量表示旋转方向,用向量的模长代表旋转的角度
θ
θ
,举个例子:
假设你站在地面上,并选择重力方向作为负z方向。然后,如果转向左侧,则会围绕z轴旋转
π2
π
2
弧度(或90°)。将轴角表示看作有序对,这将是:
(axis,angle)=⎛⎝⎜⎡⎣⎢exeyez⎤⎦⎥,θ⎞⎠⎟=⎛⎝⎜⎡⎣⎢001⎤⎦⎥,π2⎞⎠⎟=⎡⎣⎢00π2⎤⎦⎥
(
a
x
i
s
,
a
n
g
l
e
)
=
(
[
e
x
e
y
e
z
]
,
θ
)
=
(
[
0
0
1
]
,
π
2
)
=
[
0
0
π
2
]
实际上,轴角法就是利用旋转向量表示旋转,而这与旋转矩阵有很大的关系
罗德里格斯旋转
关于罗德里格斯公式的推导,我曾在一篇博客中做过:
罗德里格斯旋转推导,我们看一下罗德里格斯公式的定义就明白二者的关系了:
已知单位向量
ω=(wx,wy,wz)∈R3
ω
=
(
w
x
,
w
y
,
w
z
)
∈
R
3
,将其旋转角度
θ
θ
得到
Rω^(θ)
R
ω
^
(
θ
)
,则有:
Rω^(θ)=eω^θ=I+ω^sinθ+ω^2(1−cosθ)
R
ω
^
(
θ
)
=
e
ω
^
θ
=
I
+
ω
^
s
i
n
θ
+
ω
^
2
(
1
−
c
o
s
θ
)
其中
ω^
ω
^
是一个反对称矩阵:
⎡⎣⎢0wz−wy−wz0wxwy−wx0⎤⎦⎥
[
0
−
w
z
w
y
w
z
0
−
w
x
−
w
y
w
x
0
]
从这也就很好的揭示了旋转向量和旋转矩阵的关系了,这里的
ω
ω
就是旋转轴,
θ
θ
就是我们的旋转角度.一般而言,轴角法和罗德里格斯旋转的转换如下:
- 旋转角度
θ=r.length()
θ
=
r
.
l
e
n
g
t
h
(
)
,其中
length()
l
e
n
g
t
h
(
)
函数为求向量的模长
- 单位向量
(rx,ry,rz)=r/θ
(
r
x
,
r
y
,
r
z
)
=
r
/
θ
;
- 反对称矩阵
⎡⎣⎢0rz−ry−rz0rxry−rx0⎤⎦⎥
[
0
−
r
z
r
y
r
z
0
−
r
x
−
r
y
r
x
0
]
- 罗德里格斯旋转公式:
Vtarget=RV
V
t
a
r
g
e
t
=
R
V
李群李代数基础知识介绍
此部分主要参考高翔博士的slam数学基础博客,可以直接看大佬的博客,来理解反对称矩阵的导数性和正切空间,以及李代数的性质,此处不做过多介绍,直接上链接:高博士对李群李代数的介绍
特技模式的几个曲线
在mc_att_control中,有几个在特技模式下对油门曲线的调整,原理暂时不清楚,用python把图画出来了.
exp:
supexp:
参考资料
PID Attenuation and scaling
轴角法-维基
罗德里格斯公式推导
视觉SLAM中的数学基础 第三篇 李群与李代数
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)