四旋翼在其四个轴臂上四个桨的高速转动作用下,会受到四个桨的拉力,拉力方向与机身垂直,当四个桨产生的拉力总和大于机身重力时,飞机处于上升状态;当总拉力小于机身重力时,飞机处于下降状态;当总拉力等于机身重力时,飞机处于悬停状态。

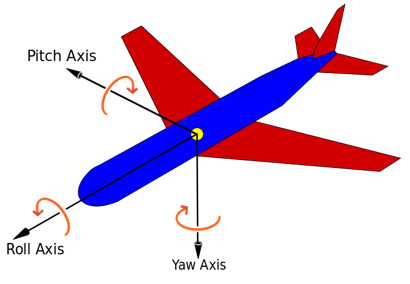
拉力大于重力和拉力小于重力时上升或下降。当然,飞机的运动方式没有这样简单,在实际飞行过程中飞机可能会受各种不同因素的共同作用成产生6个自由度的运动组合。为了掌握飞机的基本运动规律,我们先来了解一下飞机的三个基本姿态:横滚roll、俯仰pitch、偏航yaw。下图为这三个基本姿态的图解:
针对四旋翼来具体分析其三个基本姿态,先来看看十字型四旋翼的拉力情况,在不考虑其它因素的情况下,当四个螺旋桨的拉力相同时,飞机处于水平状态:

假设让左右两个电机的转速不同,它们所带动螺旋桨所产生的拉力也就会不同。例如,可以使电机0和电机2的转数不变,而使电机1的转数加快,使电机3的转速减慢。结果就会使右侧的拉力增加,而左侧的拉力减小,从而对飞机产生一个力矩,在这个力矩的所用下,飞机会向左侧横滚。
同理,如果让电机1和3的转速不变,而使电机2的转速增加,电机0的转速减慢,飞机则会产生一个力矩,在这个力矩的作用下飞机会出现俯仰姿态。
实际上,如果四个电机转动的方向是一致的,比如都做顺时针转动,在反作用力的效果下,飞机会受到一个跟电机转动方向相反的力矩,使得飞机生产逆时针的自旋。
这并不是想要的,由于四旋翼结构上的对称性我们可以将电机0和电机2顺时针转动,而让电机1和电机3逆时针转动。这样电机0和电机1对飞机产生的反向力矩就会与电机1和电机3产生的反向力矩相抵消。飞机不再产生自旋。
事实上,并不会完全禁止飞机的自旋,而是希望可以控制其自旋,也就是在想要改变飞机航向时,让其自旋;当不想改变其航向时,就不让其自旋。例如:可以使电机0和电机2加速,同时使电机1和电机3减速。由于电机0和2是顺时针转动,就会产生一个逆时针的力矩,电机1和3是逆时针运动,产生一个顺时针和力矩。由于电机0和2转速比1和3快,所以逆时针的力矩会比顺时针的力矩大,所以飞机会逆时针自旋,也就是偏航运动。反过来,让电机0和2转速减慢,而让电机1和3转数增大,飞机就会进行顺时针的偏航运动。
当飞机处于不同的姿态时,四旋翼的四个桨对飞机产生的拉力会有很大的不同,会对飞机产生上升、下降、前进、后退、左移、右移这6个自由度的运动。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)