1.现象
开机后正常运转,出现[11.548785] piix4_smbus 0000:00:07.3: SHBus Host Controller not enabled !i12.241671] sd 32:0:0:0:[sda] Assuming drive cache: urite through后突然暴毙,光标停止运动,系统加载不进去。
使用时光回溯(快照)后正常使用,一段时间后重复出现同一问题。
2.原因
虚拟机硬盘被填满了,这时手动删除一些没用或有用但以后还能装回来的文件即可。
3.解决
删除一些文件,进入安全模式后用clear,或者使用磁盘管理软件VMware虚拟机中ubuntu开机显示磁盘空间不足开不了机或内部有存储空间但下载资料弹出磁盘空间不足对话框解决办法(已解决)_aizaiyueye的博客-CSDN博客_虚拟机磁盘满了不能开机
1、下载磁盘管理软件DiskGenius,DiskGenius – 正式版下载|免费下载
2、打开下载的软件,并点击左上角的磁盘-->打开虚拟磁盘文件-->选择Ubuntu安装的磁盘如下所示:
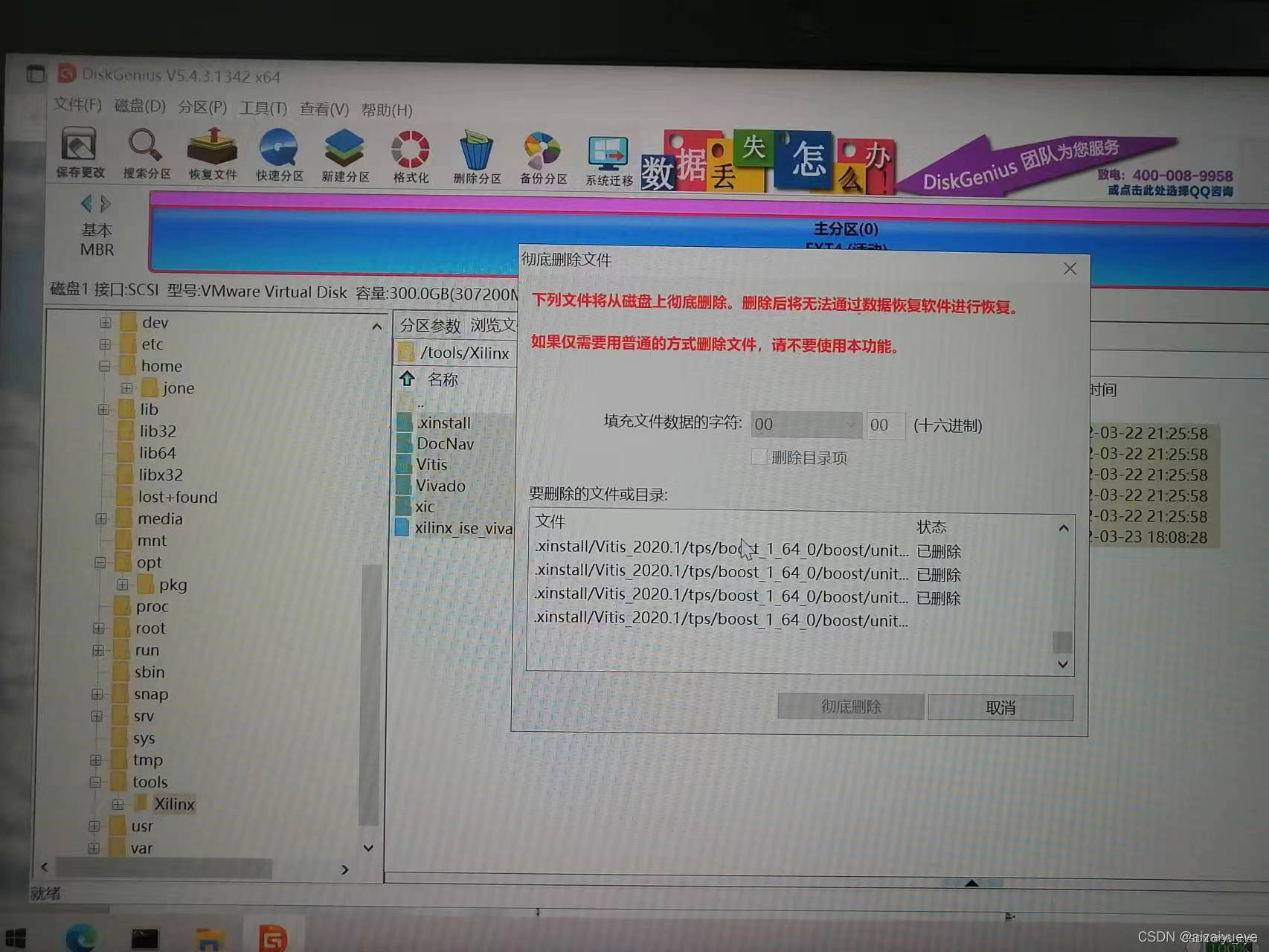
3、选择ubuntu中较大的文件进行拷贝备份后删除,匀出磁盘空间后退出该软件
4、重新打开虚拟机启动Ubuntu
5、打开Ubuntu虚拟机的终端(进不去系统的话可以再进一次recovery模式,可以进入Recovery Menu选择clean后再进一次)
sudo su
#使用root权限
cat /dev/zero > zero.fill
#将占用空间却无法清理的东西转变成一个 zero.fill文件,这个过程的时间会比较长(注意不要退出关闭ubuntu),最后出现:
cat: 写入错误: 设备上没有空间(没有关系,不要退出关闭ubuntu)
rm -f zero.fill
#将这个zero.fill文件彻底删除
注意:在此过程中并不会增大虚拟机vmdk文件的容量,因此不用担心硬盘分区被挤爆。
sudo shutdown now
#关闭虚拟机
6、VMWare硬盘压缩
编辑虚拟机设置——硬件——硬盘(SATA),选择实用工具——压缩(C)
过一段时间,等压缩完毕后,将VMWare关闭。
7、重新打开VMWare,查看一下硬盘——容量——当前大小
然后就能进去了,然后虚拟机设置那里分配一些空间,进入界面后下载gparted操作空间
Ubuntu磁盘空间不足?一招轻松扩容 - 哔哩哔哩
步骤:
首先windows下给虚拟机磁盘扩容,将物理磁盘扩容。比如我这个虚拟机是在G盘200G,就需要在磁盘管理中分配一些空间给G盘,如果电脑磁盘不够,就需要自己额外加物理磁盘。这步自行处理即可。总之确保实际物理磁盘空间要足够后面给虚拟机分配的磁盘空间大小。
1、虚拟机添加扩容硬盘。
2、在虚拟机中搜索GParted分区编辑器,没有的话在Ubuntu软件中安装。
执行下面指令也可以直接安装此软件。
sudo apt update
sudo apt install gparted

然后在系统中搜索关键词gparted找到这个软件并打开。

,主区空间拉满!搞定!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)