前言
作为使用yolov5后一次简单的尝试
准备工作
- 通过yolov5训练出自己所需要的模型查看模型训练教程
- 将模型通过tensorflow的python版转换,使用yolov5 6.1以上版本
- 安卓端引入tensorflow远端依赖,并置入模型文件在项目工程里
这里我并没有去看tensorflow的api,而是直接参考了yolov5-android
注意事项
- 模型我全部用的是demo默认模型
- 运行demo时请打开悬浮窗权限
配置gradle
需要执行cmake来生成通过jni调用的资源
在app目录下的CmakeList.txt文本可以查看具体配置
这里不过多描述,只描述构建过程
远程引入tensorflow依赖
externalNativeBuild {
cmake {
path "CMakeLists.txt"
}
}
defaultConfig {......
ndk {
abiFilters 'armeabi-v7a', 'arm64-v8a'
}
}
dependencies {......
implementation 'org.tensorflow:tensorflow-lite:2.4.0'
}
迁移文件
将在modle_tflite下的文件夹复制到如下图所示
将在main/cpp的文件夹也复制到如下图所示
postprocess.cpp文件提供了供java调用的检测函数,这里可以去参考Tensorflow官方网站,是将结果通过jni给回调至客户端
编写悬浮窗
使用了XToast,我是以library形式引入工程的
执行录制屏幕代码
使用的是官方api,MediaProjection,感兴趣可以去查找相关资料
注意在安卓10级以上需要启动一个前台服务才可以使用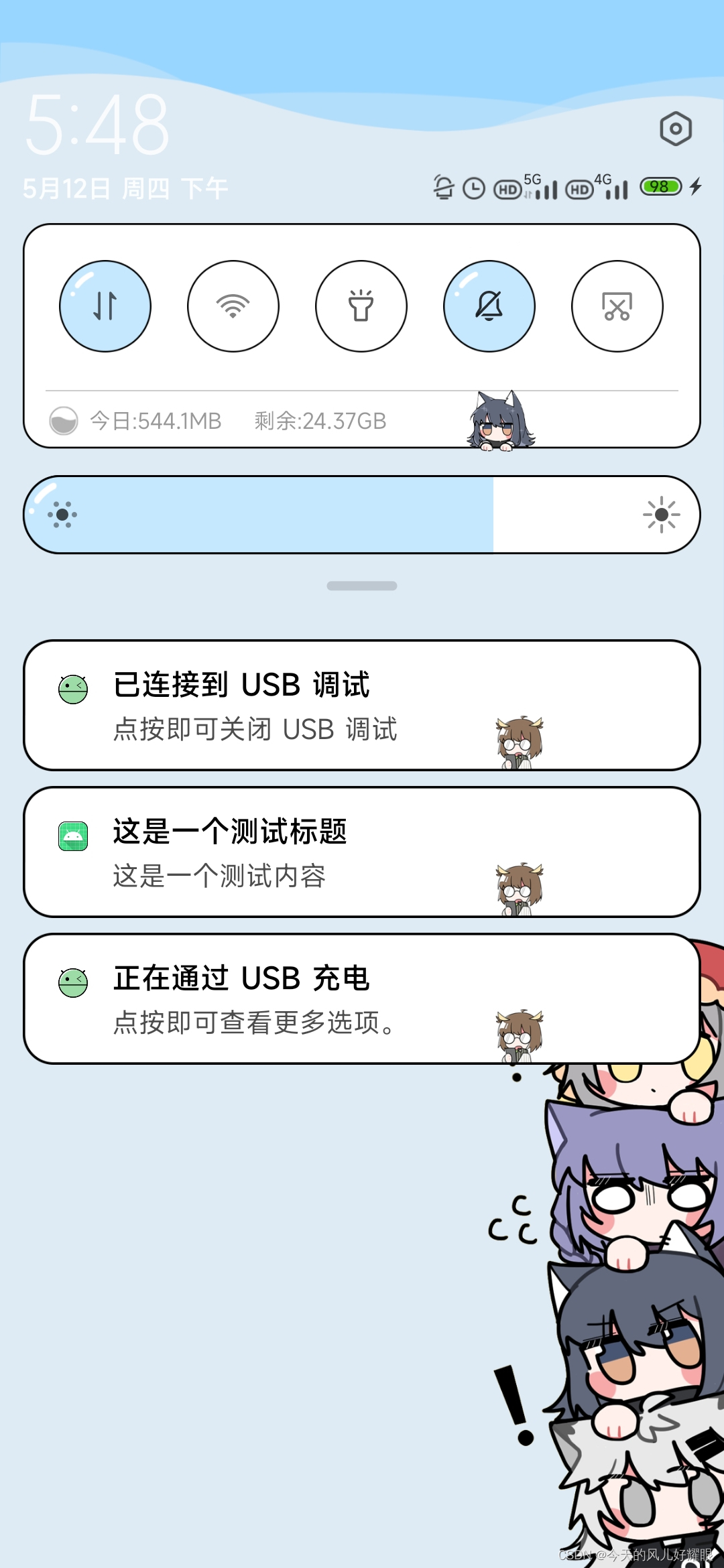
开启录屏部分代码
private var mediaProjection: MediaProjection?=null
private lateinit var projectionManager:MediaProjectionManager
......
binding.btnRecord.setOnClickListener {
projectionManager =getSystemService(MEDIA_PROJECTION_SERVICE) as MediaProjectionManager
val captureIntent= projectionManager.createScreenCaptureIntent();
startActivityForResult(captureIntent,20);
}
......
override fun onActivityResult(requestCode: Int, resultCode: Int, data: Intent?) {
super.onActivityResult(requestCode, resultCode, data)
if (requestCode == 20 && resultCode == RESULT_OK) {
FloatUtil.showFloatWindow(application).apply {
contentImageView = this
}
mediaProjection = projectionManager.getMediaProjection(resultCode, data!!);
seeContent()
}
}
开启录屏后,需要用到另外一个东西,就是mediaProjection的createVirtualDisplay函数,其实就是VirtualDisplay,创建一个虚拟显示器。mediaProjection的使用(转载)和关于VirtualDisplay的使用
private fun seeContent() {
mediaProjection?.apply {
createDetector()
createImageReader()
registerCallback(object :MediaProjection.Callback(){
override fun onStop() {
super.onStop()
}
},handler)
dispalyD = createVirtualDisplay("ScreenImageReader",640,640,1000
, DisplayManager.VIRTUAL_DISPLAY_FLAG_AUTO_MIRROR,imageReader.surface,object :VirtualDisplay.Callback(){
override fun onResumed() {
super.onResumed()
}
override fun onPaused() {
super.onPaused()
}
override fun onStopped() {
super.onStopped()
}
},handler)
}
}
这里这里使用imageReader,imageReader它是包含一个surface的,并且它有一个setOnImageAvailableListener可以进行监听视图刷新,在刷新的时候去获取image对象,关于图片的边框添加和识别操作,可以看下面代码片段
override fun onImageAvailable(p0: ImageReader?) {
p0?.apply {
val message = Message()
message.what = 0xdd
message.obj = this
handlerDelayImage.sendMessage(message)
handlerDelayImage.obtainMessage()
}
}
private fun startCacheAndSetInput(p0: ImageReader) {
var nowImage:Image?=null
try {
nowImage = p0.acquireLatestImage()
}catch (e:Exception){
nowImage = p0.acquireLatestImage()
}
nowImage?.apply {
val width = 640
val height = 640
val planes = planes
val buffer: ByteBuffer = planes[0].buffer
val pixelStride = planes[0].pixelStride
val rowStride = planes[0].rowStride
val rowPadding = rowStride - pixelStride * width
var bitmap: Bitmap =
Bitmap.createBitmap(width + rowPadding / pixelStride, height, Bitmap.Config.ARGB_8888)
bitmap.copyPixelsFromBuffer(buffer)
bitmap = Bitmap.createBitmap(bitmap, 0, 0, width, height)
detector.setInput(bitmap)
val bboxes: List<TfliteRunner.Recognition> = detector.runInference()
val resBitmap: Bitmap =ImageProcess.drawBboxes(bboxes, bitmap, 640)
if (bboxes.size>0){
if (bboxes[bboxes.lastIndex].title=="person"){
if (!personClick){
personClick = true
}
}else{
personClick = false
}
}else{
personClick = false
}
runOnUiThread {
contentImageView?.apply {
setImageBitmap(resBitmap)
}
}
close()
}
}
关键使用类
悬浮窗 -FloatUtil
模型检测-TfliteRunner
首页-MainActitvity
边框绘制-ImageProcess
使用效果
最后github地址
yolov5结合tensflow在移动端的方案
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)