一、简介
之前我们把所有源码文件放在一个文件夹下。 这样做存在两个主要问题,第一,代码存放混乱不易阅读。第二,程序可移植性差。如果工程源文件达到几十、甚至数百个的时候,这样一股脑全部放到根目录下就会使工程显得混乱不堪。所以我们必须对工程文件做管理,将不同功能的源码文件放到不同的目录中。另外我们也需要将源码文件中,所有完成同一个功能的代码提取出来放到一个单独的文件中,也就是对程序分功能管理。
如何对一个工程进行整理,使其美观、功能模块清晰、易于阅读。
二、分类存储代码
修改前的程序结构:

修改后的程序结构:
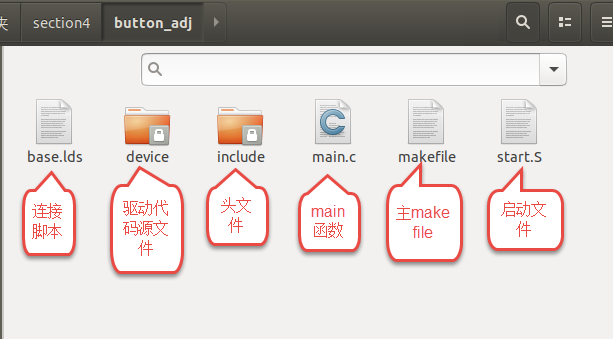
- base.lds :将led.lds更改为base.lds。连接脚本与具体的外设无关,并且后面的程序我们几乎不会去修改链接脚本,这里把它修改为base.lds,你也可以根据自己喜好命令,只要和makefile中一致即可。
- device文件夹 :保存外设驱动的源文件(.c文件)。
- include文件夹 :保存程序中使用的头文件。
- makefile :主makefile 。在主makefile中会调用“device”文件夹下的子makefile。
三、修改makefile
修改makefile主要包括两部分
- 第一部分,在“device”文件夹下添加并编写子makefile。
- 第二部分,修改主makefile。
3.1 编写子makefile
子makefile: 用于将“device”文件夹下的驱动源文件编译为一个“.o”文件
all : button.o led.o
arm-none-eabi-ld -r $^ -o device.o
%.o : %.c
arm-none-eabi-gcc ${header_file} -c $^
%.o : %.S
arm-none-eabi-gcc ${header_file} -c $^
.PHONY: clean
clean:
-rm -f *.o *.bak
- 添加最终目标以及依赖文件
生成最终目标“device.o”。如果程序中新增了某个外设驱动程序,只需要将对应的“.o”文件填入“依赖”处即可。
“$^” 代表所有的依赖文件。
“-o” 指定输出文件名。
all : button.o led.o
arm-none-eabi-ld -r $^ -o device.o
- 添加编译C文件的命令
编译“device”文件夹下的所有“.c”文件并生成对应的“.o”文件,其中“header_file”是头文件路径,它是定义在主makefile的变量。
“$^” 替代要编译的源文件。
%.o : %.c
arm-none-eabi-gcc ${header_file} -c $^
- 添加汇编文件编译命令
编译“device”文件夹下的所有“.S”文件并生成对应的“.o”文件,其中“header_file”是头文件路径,它是定义在主makefile的变量。
“$^” 替代要编译的源文件。
%.o : %.S
arm-none-eabi-gcc ${header_file} -c $^
- 添加清理命令
“.PHONY” 定义了伪目标“clean”。伪目标一般没有依赖,并且 “clean” 伪目标一般放在Makefile文件的末尾。
“clean” 为目标用于删除make生成的文件。
.PHONY: clean
clean:
-rm -f *.o *.bak
3.2 修改主makefile
主makefile的改动主要有两点:
- 在编译命令中指明头文件位置。
- 使用命令调用子makefile,生成依赖文件。
#定义变量,用于保存编译选项和头文件保存路径
header_file := -fno-builtin -I$(shell pwd)/include
export header_file
all : start.o main.o device/device.o
arm-none-eabi-ld -Tbase.lds $^ -o base.elf
arm-none-eabi-objcopy -O binary -S -g base.elf base.bin
%.o : %.S
arm-none-eabi-gcc -g -c $^
%.o : %.c
arm-none-eabi-gcc $(header_file) -c $^
#调用其他文件的makefile
device/device.o :
make -C device all
#定义清理伪目标
.PHONY: clean
clean:
make -C device clean
-rm -f *.o *.elf *.bin
- 添加编译选项和头文件保存路径
定义变量 “header_file”。在makefile中“变量”更像C原因中的宏定义。
“-fno-builtin” 是一个编译选项,用于解决库函数与自己编写函数同名问题。
“-I$(shell pwd)/include” 用于指定头文件路径。
“export header_file” 声明后可以在其他makefile中调用。
header_file := -fno-builtin -I$(shell pwd)/include
export header_file
all : start.o main.o device/device.o
- 添加链接命令
“-Tbase.lds” 表示使用base.lds链接脚本链接程序。
“$^” 代表所有的依赖文件。
“-o” 指定输出文件名。
arm-none-eabi-ld -Tbase.lds $^ -o base.elf
- 添加格式转换命令
“-O binary” 指定输出二进制文件。
“-S” 不从源文件中复制重定位信息和符号信息。
“-g” 不从源文件中复制可调试信息。
arm-none-eabi-objcopy -O binary -S -g base.elf base.bin
- 添加汇编文件编译命令
“$^” 替代要编译的源文件。
%.o : %.S
arm-none-eabi-gcc -g -c $^
- 添加编译C文件的命令
“$^” 替代要编译的源文件。
%.o : %.c
arm-none-eabi-gcc $(header_file) -c $^
- 添加调用其他文件的makefile
定义生成“device/device.o”的命令,“device.o”文件由子makefile生成,所以这里只需要调用子makefile即可。
device/device.o :
make -C device all
- 添加清理命令
在清理命令中不但要清理主makefile所在文件夹的内容还要调用子makefile的清理命令以清理子makefile所在文件夹的内容。
“.PHONY” 定义了伪目标“clean”。伪目标一般没有依赖,并且 “clean” 伪目标一般放在Makefile文件的末尾。
“clean” 为目标用于删除make生成的文件。
.PHONY: clean
clean:
make -C device clean
-rm -f *.o *.elf *.bin
• 由 Leung 写于 2023 年 2 月 21 日
• 参考:9. 整理工程文件
i.MX6ULL裸机开发 四:BSP 工程管理
IMX6ULL——BSP工程管理Makefile文件格式
【Linux裸机开发】-C语言点灯-基于NXP官方库及BSP项目工程管理
IMX6Ull_BSP工程整理
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)