本文是Deep Learning 之 最优化方法系列文章的Momentum(动量)方法。主要参考Deep Learning 一书。
整个优化系列文章列表:
Deep Learning 之 最优化方法
Deep Learning 最优化方法之SGD
Deep Learning 最优化方法之Momentum(动量)
Deep Learning 最优化方法之Nesterov(牛顿动量)
Deep Learning 最优化方法之AdaGrad
Deep Learning 最优化方法之RMSProp
Deep Learning 最优化方法之Adam
先上结论:
1.动量方法主要是为了解决Hessian矩阵病态条件问题(直观上讲就是梯度高度敏感于参数空间的某些方向)的。
2.加速学习
3.一般将参数设为0.5,0.9,或者0.99,分别表示最大速度2倍,10倍,100倍于SGD的算法。
4.通过速度v,来积累了之间梯度指数级衰减的平均,并且继续延该方向移动:
再看看算法:
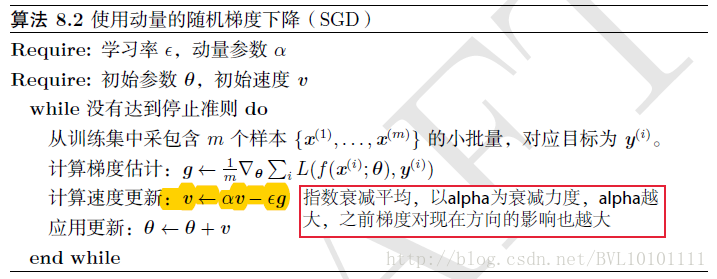
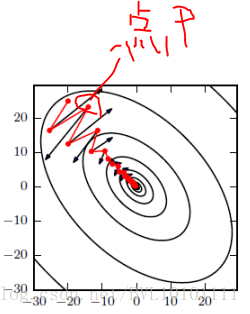
动量算法直观效果解释:
如图所示,红色为SGD+Momentum。黑色为SGD。可以看到黑色为典型Hessian矩阵病态的情况,相当于大幅度的徘徊着向最低点前进。
而由于动量积攒了历史的梯度,如点P前一刻的梯度与当前的梯度方向几乎相反。因此原本在P点原本要大幅徘徊的梯度,主要受到前一时刻的影响,而导致在当前时刻的梯度幅度减小。
直观上讲就是,要是当前时刻的梯度与历史时刻梯度方向相似,这种趋势在当前时刻则会加强;要是不同,则当前时刻的梯度方向减弱。
从另一个角度讲:
要是当前时刻的梯度与历史时刻梯度方向相似,这种趋势在当前时刻则会加强;要是不同,则当前时刻的梯度方向减弱。
假设每个时刻的梯度g总是类似,那么由 我们可以直观的看到每次的步长为:
我们可以直观的看到每次的步长为:

即当设为0.5,0.9,或者0.99,分别表示最大速度2倍,10倍,100倍于SGD的算法。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)