目录
1.CANdb++ Editor
2.数据库Networks
3.数据库ECUs
4.数据库Network Node
5.数据库Messages
6.数据库Signals
国庆节倒计时前两天更。
本节将对CAN总线数据库文件的创建过程进行介绍。
1.CANdb++ Editor
在汽车的整个CAN总线系统中,车上各个ECU之间进行通信及其所要发送和接收报文的关系等都是由总线Database文件定义的,其通用格式为.dbc。
在CANoe中有专门的总线数据库创建工具CANdb++ Editor,用户可通过Tools菜单栏来打开,其界面如下图所示。

点击File菜单创建一个database,并保存值CANdb文件夹下,如下图所示。

2.数据库Networks
在数据库的Networks模块里面可以修改网络名及协议等。

3.数据库ECUs
显示系统中所使用的各ECU名,与网络节点的设计相关。
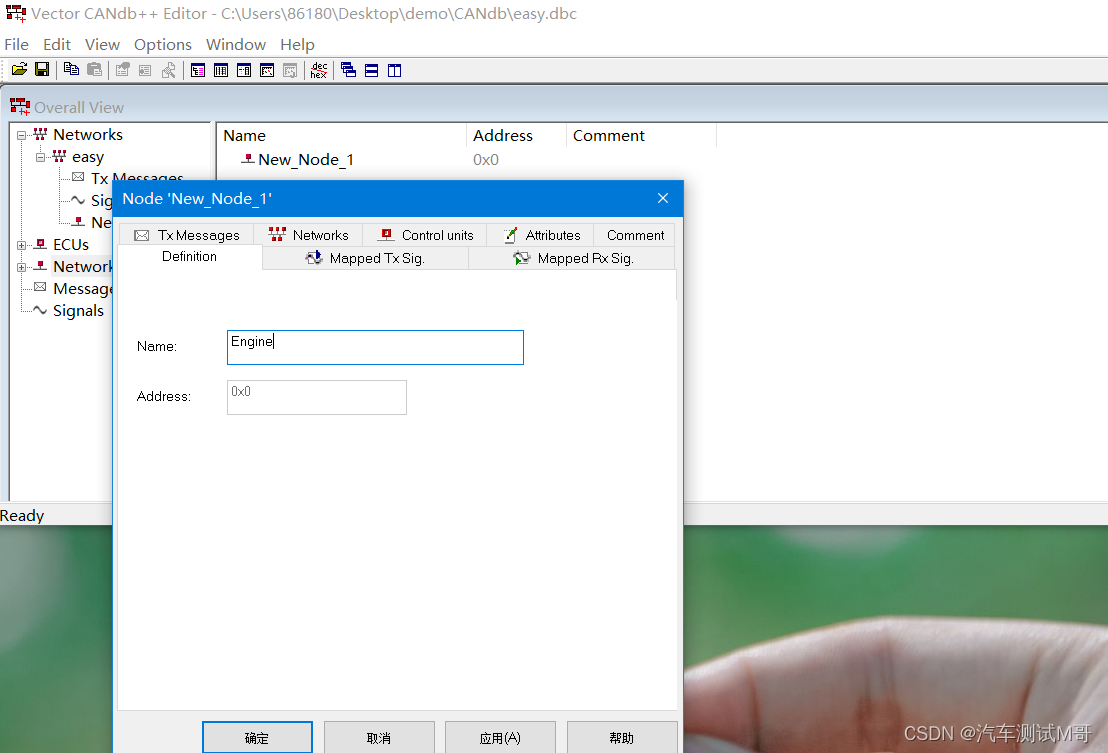
4.数据库Network Node
各ECU通过网络节点实现总线上报文的发送与接收,根据需要的ECU创建对应的网络节点。鼠标在Network Node右击创建名为Engine,地址为0x0的网络节点,如下。
同样的道理,创建名为Display和Light的网络节点。
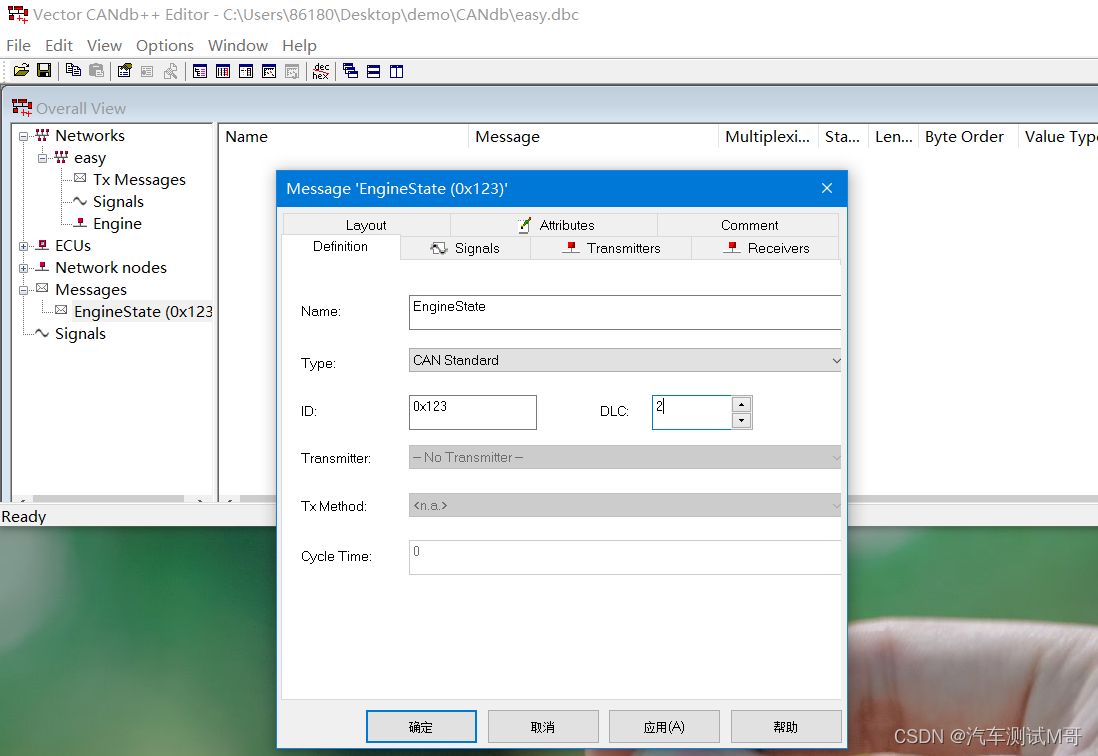
5.数据库Messages
Meaasges(报文)为总线上发送与接收的数据,其符合CAN报文的帧格式,数据通常由不同的信号组成。右击Messages新建一个名为EngineState,ID为0x123,DLC为2的报文,如下。
根据需要在该界面的Transmitter选项下将Engine节点添加为发送节点,其余节点可按范例来操作创建报文及其添加相应的接收发送节点,如下。

6.数据库Signals
Signals是报文中的最小数据单元。右键Signals创建名为On/Off,长度为1bit的信号,并将其关联到相应的EngineState报文中(在Meaasges中将信号添加到EngineState),其余报文方法类似。

这样,一个简单地数据库就算创建完毕。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)