ESP32-CAM模组的核心芯片:ESP32-S 模块是一款超小体积的多功能通用型 802.11b/g/n WiFi+BT+BLE(蓝牙) SoC 射频模组,采用具有双核处理器的ESP32作为主控,主频高达600DMIPS,模块搭配 PCB 板载天线和 IPEX 座,通过 0Ω 电阻选择(默认使用 PCB 板载天线),功能强大,用途广泛,可用于低功耗传感器网络和要求极高的任务。 产品特性 采用低功耗双核32位CPU,可作应用处理器 主频高达240MHz,运算能力高达 600 DMIPS 内置 520 KB SRAM,外置4M PSRAM 支持UART/SPI/I2C/PWM/ADC/DAC等接口 支持OV2640(我们用的是这个)和OV7670摄像头,内置闪光灯, 支持图片WiFI上传 支持TF卡 支持多种休眠模式。 内嵌Lwip和FreeRTOS 支持 STA/AP/STA+AP 工作模式 支持 Smart Config/AirKiss 一键配网 支持二次开发 详细参数查看安信可官网https://wiki.ai-thinker.com
https://blog.csdn.net/Naisu_kun/article/details/84958561 https://www.arduino.cn/ https://www.arduino.cn/thread-81194-1-1.html下载地址
安装第三方库: https://www.arduino.cc/en/Guide/Libraries?setlang=cn库安装教程 ESPAsyncWebServer:https://github.com/me-no-dev/ESPAsyncWebServer AsyncTCP:https://github.com/me-no-dev/AsyncTCP
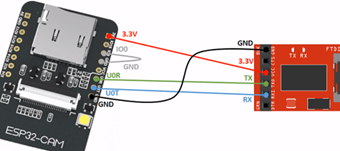
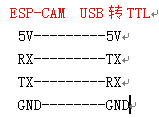
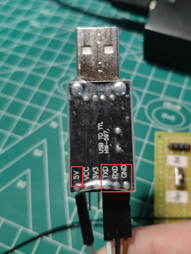
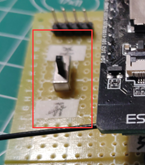
接线
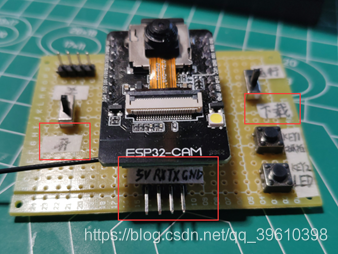
这边已经焊好了方便下载程序。开关打开,下载模式,接线注意多看几次,正负接反就凉了
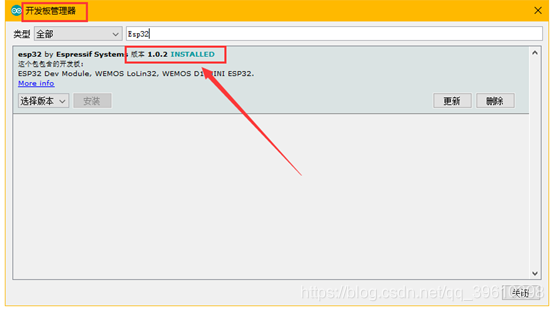
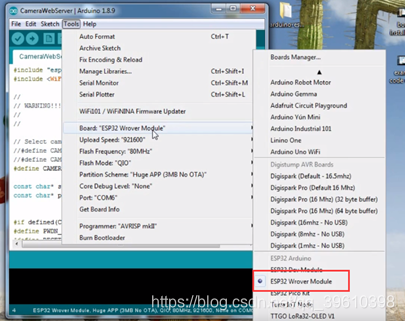
点开程序 开发板选择
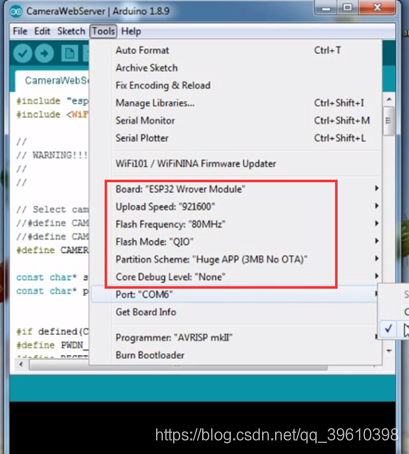
下载模式配置
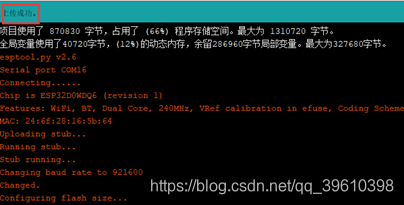
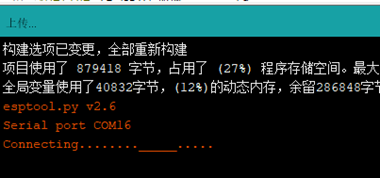
等待编译…需要一会 如果出现下面这种 把板上开关重新开关开 再重新下载
切换到运行模式 这里设置的wifi是这个"DY"; “1403119048”;手机开启热点
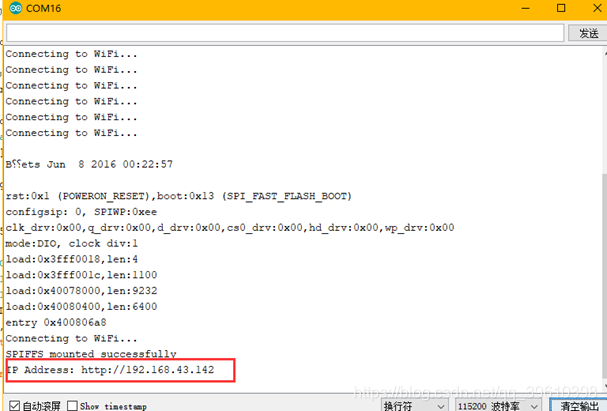
打开串口监视器 开关电源重启模块,查看串口输出内容;这里我是自动分配到这个IP http://192.168.43.142 程序启动时板载LED打开,等待初始化完成时(wifi连接上后)灯灭,没灭就再开关电源重启几次,下图串口输出是成功界面
内部主要初始化WebServer 、摄像头OV2620 、LED、按钮、串口等 串口接收指令、判断是否抓拍、按键扫描三部分
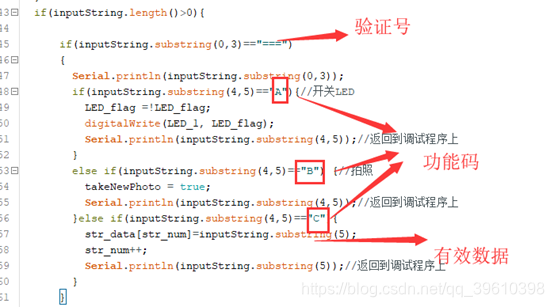
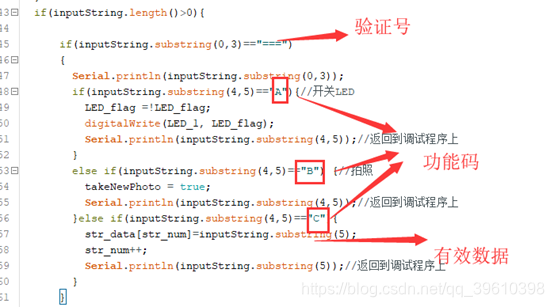
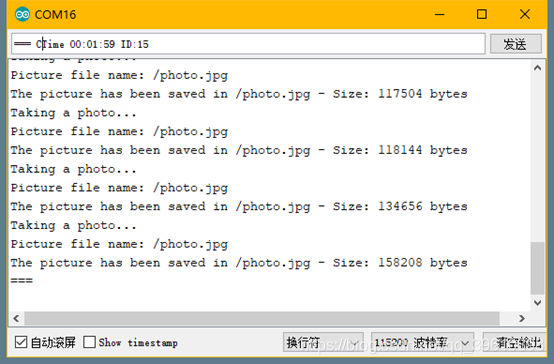
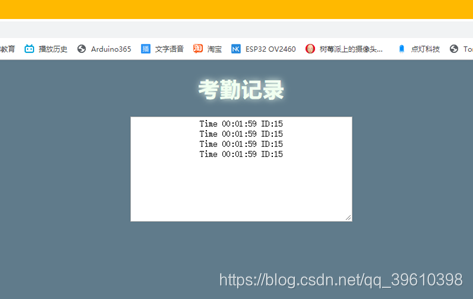
串口测试 “=== A”LED开关控制 “=== B”抓拍控制 “=== CXXXXXXXXXX” 接收考勤记录数据,在指纹验证成功是发送过来 例 “=== CTime 00:01:59 ID:15”提取有效数据“Time 00:01:59 ID:15” 发送‘=== A’后LED灯亮,再发一次‘=== A’LED又灭了
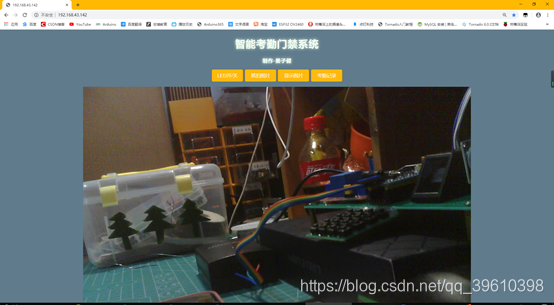
Web测试 线连接上手机热点前面提到的wifi是这个"DY"; “1403119048”; 浏览器输入前面串口得到的IP 可以控制LED开关,抓拍图片后3s左右点击显示图片可以显示刚刚抓拍的图片, 串口发送几次“=== CTime 00:01:59 ID:15”
拍照缓存到Flash中需要时间,5S左右拍照一次最佳