升级本地wsl
首先你要确保你的windows版本
对于x64系统:1903 版或更高版本,内部版本18362或更高版本。
ARM64 系统:20H1(2004) 版本或更高版本,内部版本19041年或更高版本。

升级已安装的wsl需要先将我们系统的wsl升级,下面是两种架构的升级包,如果你不知道你是什么架构哪下x64就对了。
x64: https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_x64.msi
arm64: https://wslstorestorage.blob.core.windows.net/wslblob/wsl_update_arm64.msi
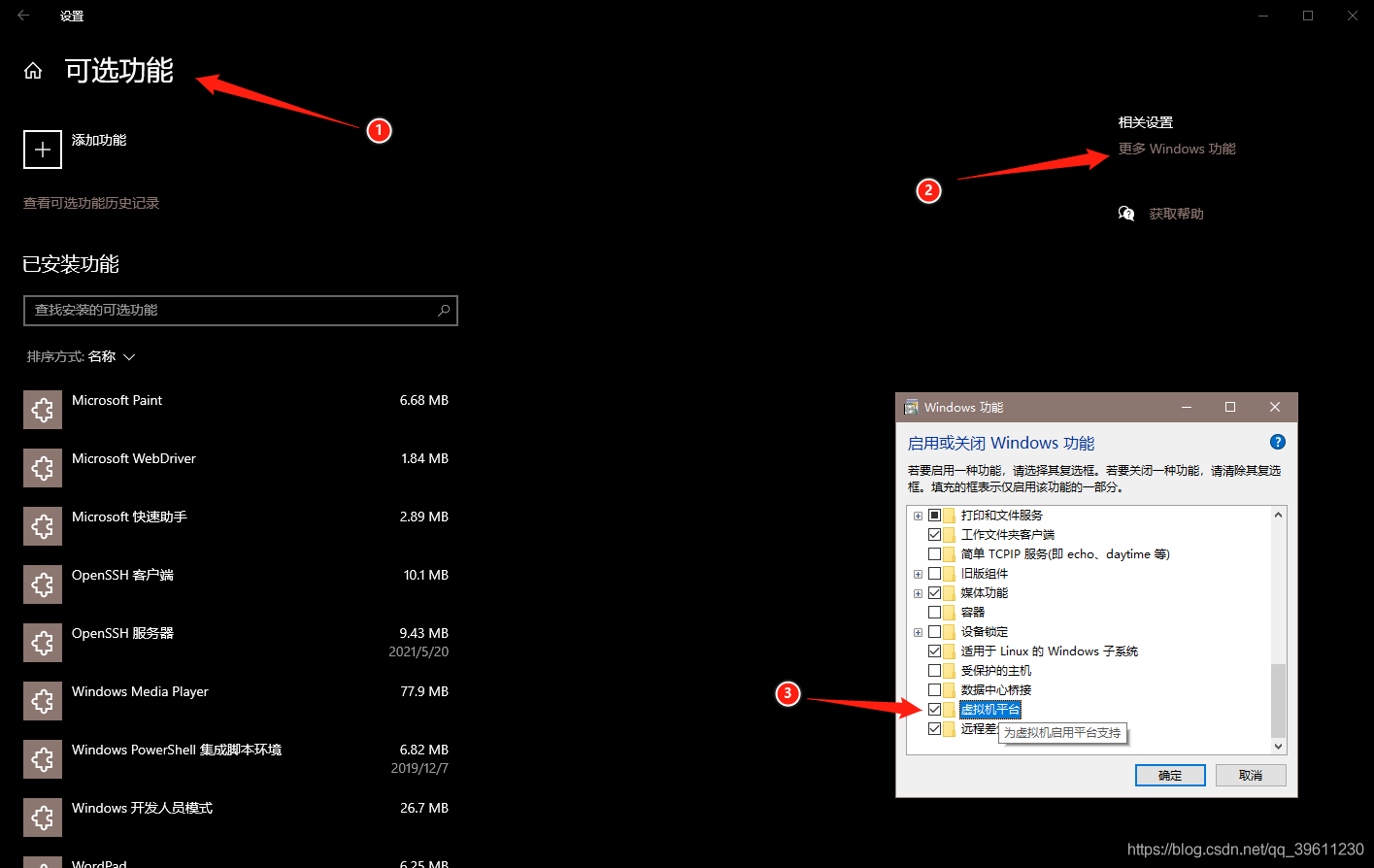
安装完成后我们需要安装一个windows功能,在设置->应用->可选功能->更多windows功能->虚拟机平台或者在管理员启动的powershell中输入dism.exe /online /enable-feature /featurename:VirtualMachinePlatform /all /norestart
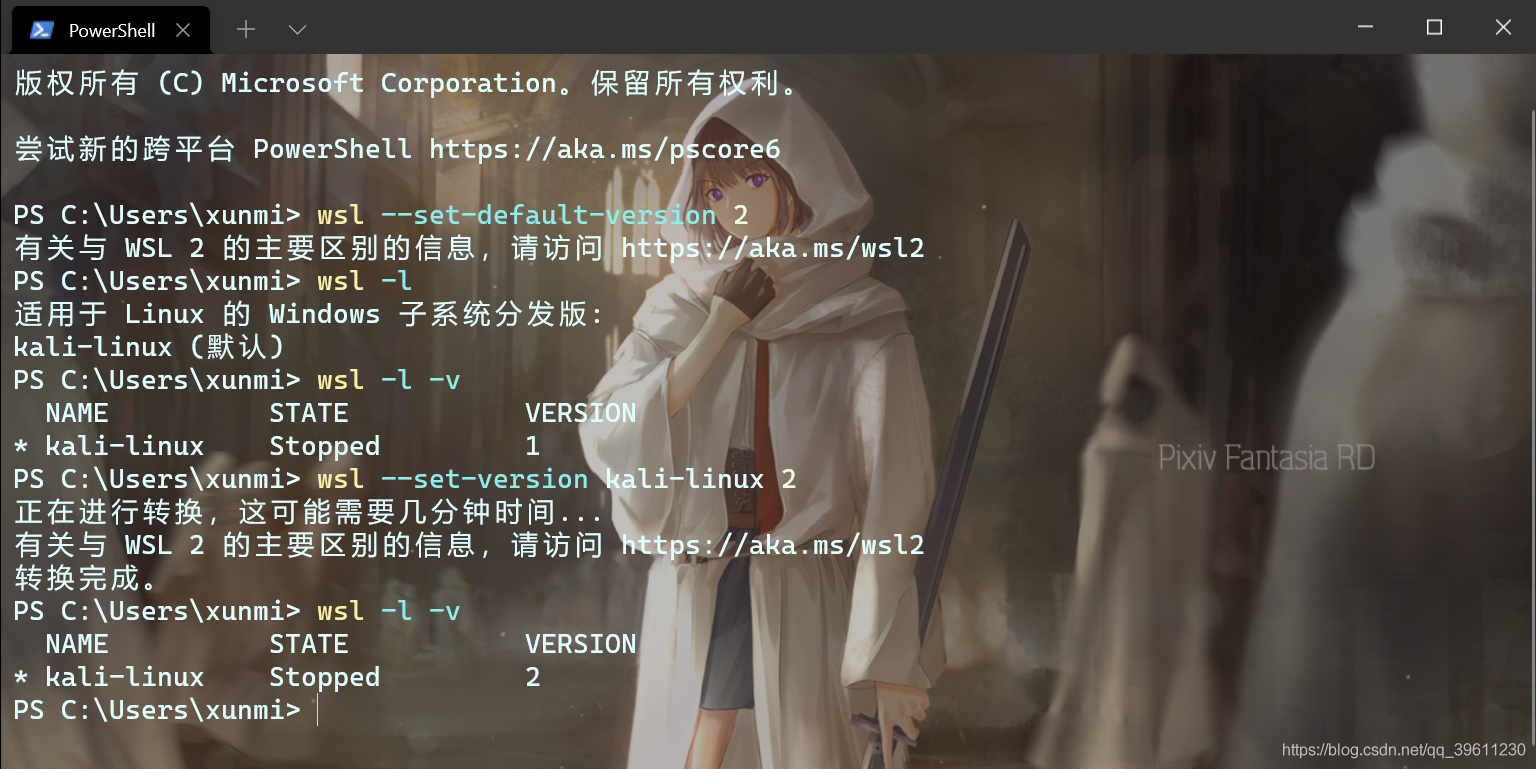
执行完上述操作后,使用更改默认分支: wsl --set-default-version 2命令,之后我们在新安装的wsl都会默认使用wsl2的内核(不这样做的话新安装的wsl还是会使用wsl1作为内核)
升级已安装的wsl
如果你想将已经安装的wsl升级为wsl2主需要执行wsl --set-version wsl名字 2即可。比如wsl --set-version kali-linux 2。(使用wsl -l可以查看已安装的wsl,wsl -l -v可以看出当前已安装的wsl使用的内核版本)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)