RoboCup智能机器人足球教程(三)
实现守门员代码
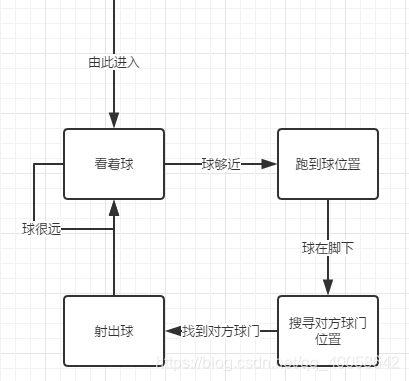
守门员逻辑实现比较容易,但是最好开始的时候画好流程图,理顺逻辑,守门员一直盯着球,当球距离守门员够近的时候,守门员前去扑球,扑到球后朝对面射出,逻辑图为:
实现逻辑的办法就是定义状态变量,用if控制,在这里,我们定义如下几个重要的状态变量:
isCatchBall: 球是否在脚下
isMove: 是否进行了瞬移,守门员扑到球后是可以进行瞬移的,我们要利用好。
主要架构的伪代码为:
if isCatchBall == true
search goal
kick
else
if ball_distance < 1
catch ball
else
look at ball
下面是完全的代码:
if(id == 1){
if (std::strncmp(msg, "(see ", 5)==0){
if(isCatchBall == 0){
double ball_distance = 0; // 球的方向
double ball_direction = 0; // 球的角度
char *p;
p = strstr(msg, "(ball)");
if (p == 0) { // 表示看不见球
sprintf(command, "(turn 50)"); // 转50度
sendMessage(command);
return;
}
std::sscanf(p, "(ball) %lf %lf", &ball_distance, &ball_direction);
// 如果与球的角度相差太大,转向球的方向
if (ball_direction >5 || ball_direction < -5) {
sprintf(command, "(turn %lf)", ball_direction);
sendMessage(command);
return;
}
// 当球非常远的时候
if(ball_distance > 13){
isMove=0; isCatchBall = 0; // 这里是进行防错处理的
}
// 当球不近也不远的时候
if(ball_distance>1 && ball_distance<13){
sprintf(command, "(dash 200)"); // 冲向球的位置
sendMessage(command);
isMove=0; isCatchBall = 0; // 这里是进行防错处理的
return;
}
// 当球很近的时候
if (ball_distance<1) { // 如果与球的距离小于3
sprintf(command, "(catch %lf)", ball_direction); //发送catch命令以捕获球
sendMessage(command);
isCatchBall = 1; // 抓住球的布尔变量
return;
}
}
// 抓住球的时候
if(isCatchBall == 1)
{ // 如果没有瞬移,先进行瞬移,catch球之后允许瞬移
if(isMove == 0) // 这个布尔变量是为了防止二次瞬移的
{
sprintf(command, "(move -50 0)");
sendMessage(command);
isMove = 1;
return;
}
// 现在开始看门
double goal_distance = 0; // 门距离
double goal_dirction = 0; // 门方向
char *p;
if(side == 1) p = strstr(msg, "(goal r)"); // 找到门的字符串地址
else p = strstr(msg, "(goal l)");
if (p != 0) // 获取门的位置信息
{
if(side == 1) std::sscanf(p, "(goal r) %lf %lf", &goal_distance, &goal_dirction);
else std::sscanf(p, "(goal l) %lf %lf", &goal_distance, &goal_dirction);
// 踢球!
sprintf(command, "(kick 100 %lf)", goal_dirction+20); // 朝门的方向踢球
sendMessage(command);
isCatchBall = 0;
isMove = 0;
}
else{ // 没看到门,转身看门
sprintf(command, "(turn 50)");
sendMessage(command);
}
return;
}
}
}
RoboCup智能机器人足球教程(二)
RoboCup智能机器人足球教程(四)
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)