树莓派安装64bit系统并安装miniconda
某机械臂只有arm64的动态链接库,所以如题…中间过程无比曲折,记录一下。
1、安装64bit系统
1.1 下载系统
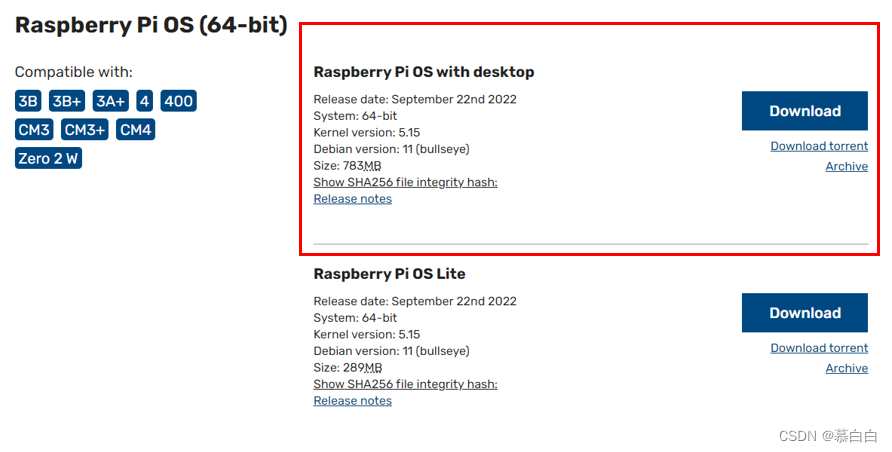
树莓派系统官网:https://www.raspberrypi.org/software/operating-systems/
红框中的是64位带桌面的系统。
1.2 SD Card Formatter 格式化SD卡
1.3 Win32DiskImager把镜像系统文件写入SD卡
1.4 无法在2K显示器上显示桌面
把SD卡插入电脑,修改config.txt文件:
hdmi_force_hotplug=1
hdmi_group=2
hdmi_mode=85
参考链接
2、安装miniconda
2.1 下载miniconda3.4.9
需要python3.8的版本,所以下载对应的miniconda。
wget https://repo.anaconda.com/miniconda/Miniconda3-py38_4.9.2-Linux-aarch64.sh
2.2 安装miniconda3.4.9
bash Miniconda3-py38_4.9.2-Linux-aarch64.sh
这里不要加sudo,否则会装在/root中,只能在root权限下使用,很不方便。
过程中需要输入“yes”
参考链接
中间遇到的问题:系统不能在2k屏上显示、某次拔电后系统无法登录、conda虚拟环境中pip报非法指令、numpy安装不成功、远程桌面连接和VNC都不行(目前依旧不行)、动态链接库厂家说的要求python3.7且有人在nano中使用成功,但我在3.7的环境下报找不到libpython3.8.so.1.0…
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)