1.需要按照给定配置准备python3.8环境与相关依赖包,全程在windows环境下进行
2.github
thuml/Time-Series-Library: A Library for Advanced Deep Time Series Models. (github.com)
论文
TimesNet: Temporal 2D-Variation Modeling for General Time Series Analysis | OpenReview
3.windows运行shell脚本与注意事项
通过使用git bash运行sh脚本,这里需要在git bash中使用anoconda,没有git可以先安装一个
可参考下面链接
(136条消息) 在 Git Bash 中使用 Anaconda Conda_git bash anaconda_Xovee的博客-CSDN博客
另外需要修改你想要使用的对应sh文件,在最后添加
--num_workers 0
因为linux系统中可以使用多个子进程加载数据,windows系统里是不可以的
别忘了上一行的斜杠
参考(136条消息) RuntimeError: An attempt has been made to start a new process before the current process解决(亲测有效)_小肖爱编程的博客-CSDN博客
论文解读正在进行。。后续更新
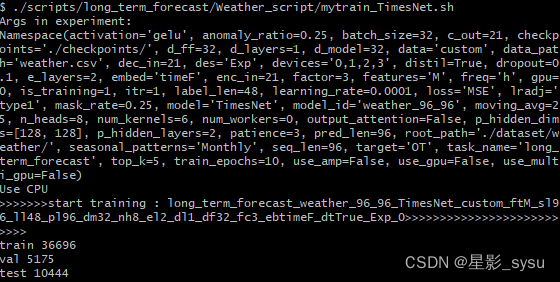
在根目录右键git bash here,跑的scripts/long_ter_forecast/Weather_script/TimesNet.sh
区别是我在每一次批处理后面加了一句 --num_workers 0 ,其他没做改动

测试的时候用的CPU,大家装了cuda的可以改成GPU,可以在脚本里改,也可以在run.py里面改
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)