一、输入输出系统应用编程
1.输入系统简介
1.1 输入设备
常见的输入设备有键盘、鼠标、遥控杆、书写板、触摸屏等等,用户通过这些输入设备与 Linux 系统进行数据交换。
1.2 输入系统
Linux 系统为了统一管理这些输入设备,实现了一套能兼容所有输入设备的 框架:输入系统。驱动开发人员基于这套框架开发出程序,应用开发人员就可以 使用统一的 API 去使用设备。
2.输入系统框架及调试
2.1 框架概述
如图1所示为输入系统框架。
 图1 输入系统框架
图1 输入系统框架
假设用户程序直接访问/dev/input/event0 设备节点,或者使用 tslib 访问设备节点,数据的流程如下:
①
APP
发起读操作,若无数据则休眠;
② 用户操作设备,硬件上产生中断;
③ 输入系统驱动层对应的驱动程序处理中断:
读取到数据,转换为标准的输入事件,向核心层汇报。 所谓输入事件就是一个“struct input_event”结构体。
④ 核心层可以决定把输入事件转发给上面哪个
handler
来处理:
从 handler
的名字来看,它就是用来处输入操作的。有多种
handler
,比 如:evdev_handler、
kbd_handler
、
joydev_handler
等等。
最常用的是 evdev_handler
:它只是把
input_event
结构体保存在内核 buffer 等,
APP
来读取时就原原本本地返回。它支持多个
APP
同时访问输入设 备,每个 APP
都可以获得同一份输入事件。 当 APP
正在等待数据时,
evdev_handler
会把它唤醒,这样
APP
就可以返回数据。
⑤
APP
对输入事件的处理:
APP 获 得 数 据 的 方 法 有
2
种 : 直 接 访 问 设 备 节 点
(
比如/dev/input/event0,1,2,...),或者通过
tslib
、
libinput
这类库来间接访 问设备节点。这些库简化了对数据的处理。
2.2 编写 APP 需要掌握的知识
1.内核中怎么表示一个输入设备?
使用 input_dev 结构体来表示输入设备,如图2所示.
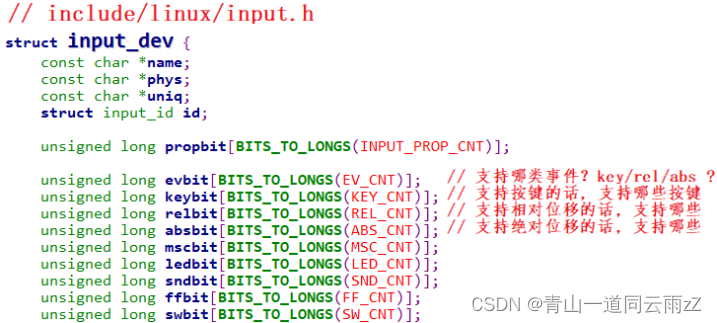 图2 输入设备结构体
图2 输入设备结构体
2.APP可以得到什么数据?
可以得到一系列的输入事件,就是一个一个“struct input_event”,如图3所示为定义。
 图3 输入设备结构体
图3 输入设备结构体
每个输入事件 input_event 中都含有发生时间:timeval 表示的是“自系 统启动以来过了多少时间”,它是一个结构体,含有“tv_sec、tv_usec”两项 (即秒、微秒)。 输入事件 input_event 中更重要的是:type(哪类事件)、code(哪个事件)、 value(事件值)。
①
type
:表示哪类事件;
②
code
:表示该类事件下的哪一个事件;
③
value
:表示事件值;
④ 事件之间的界线:驱动程序上报完一系列的数据后,会上报一个“同步事件”,表示数据上报完毕。APP 读到“同步事件”时,就知道已经读完了当前的数据。 同步事件也是一个 input_event 结构体,它的 type、code、value 三项都是 0。
3.输入子系统支持完整的API操作
支持这些机制:阻塞、非阻塞、POLL/SELECT、异步通知。
2.3 调试技巧
1.确定设备信息
输入设备的设备节点名为/dev/input/eventX(也可能是/dev/eventX,X 表示 0、1、2 等数字)。查看设备节点,可以执行以下命令:
ls /dev/input/* -l
#或
ls /dev/event* -l
想要获得设备节点对应的硬件,可以执行以下命令:
cat /proc/bus/input/devices
这里的 I、N、P、S、U、H、B 对应的含义如下:
①
I:id of the device(
设备 ID) ,该参数由结构体 struct input_id 来进行描述,驱动程序中会定义这样的结构体:
//include/uapi/linux/input.h
struct input_id{
__u16 bustype;
__u16 vendor;
__u16 product;
__u16 version;
};
② N:name of the device(设备名称);
③ P:physical path to the device in the system hierarchy(
系统层次结构中设备的物理路径);
④ S:sysfs path(
位于
sys
文件系统的路径);
⑤ U:unique identification code for the device(if device has it) (
设备的唯一标识码);
⑥ H:list of input handles associated with the device(
与设备关联的输入句柄列表);
⑦
B:bitmaps(
位图
) 。
2.使用命令读取设备
调试输入系统时,直接执行类似下面的命令,然后操作对应的输入设备即可 读出数据:
hexdump /dev/input/event0
3.APP访问硬件
1.APP 访问硬件的 4 种方式:妈妈怎么知道孩子醒了?
① 时不时进房间看一下:
查询方式
简单,但是累
② 进去房间陪小孩一起睡觉,小孩醒了会吵醒她:
休眠
-
唤醒
不累,但是妈妈干不了活了
③ 妈妈要干很多活,但是可以陪小孩睡一会,定个闹钟:
poll
方式
要浪费点时间,但是可以继续干活。 妈妈要么是被小孩吵醒,要么是被闹钟吵醒。
④ 妈妈在客厅干活,小孩醒了他会自己走出房门告诉妈妈:
异步通知
妈妈、小孩互不耽误。
这
4
种方法没有优劣之分,在不同的场合使用不同的方法。
2.获取设备信息
通过 ioctl 获取设备信息,ioctl 的参数如下:
int ioctl(int fd, unsigned long request, ...);
3.查询方式
APP 调用 open 函数时,传入“O_NONBLOCK”表示“非阻塞”。
APP 调用 read 函数读取数据时,如果驱动程序中有数据,那么 APP 的 read 函数会返回数据,否则也会立刻返回错误。
4.休眠-唤醒方式
APP 调用 open 函数时,不要传入“O_NONBLOCK”。
APP 调用 read 函数读取数据时,如果驱动程序中有数据,那么 APP 的 read 函数会返回数据;否则 APP 就会在内核态休眠,当有数据时驱动程序会把 APP 唤 醒,read 函数恢复执行并返回数据给 APP。
5.POLL/SELECT 方式
POLL 机制、SELECT 机制是完全一样的,只是 APP 接口函数不一样。
简单地说,它们就是“定个闹钟”:在调用 poll、select 函数时可以传入 “超时时间”。在这段时间内,条件合适时(比如有数据可读、有空间可写)就会立刻返回,否则等到“超时时间”结束时返回错误。
6.异步通知方式
所谓同步,就是“你慢我等你”。 那么异步就是:你慢那你就自己玩,我做自己的事去了,有情况再通知我。
所谓异步通知,就是 APP 可以忙自己的事,当驱动程序用数据时它会主动给 APP 发信号,这会导致 APP 执行信号处理函数。
二、网络通信
1.网络通信概述
1.1 IP和端口
所有的数据传输,都有三个要素:源、目的、长度。在网络传输中需要使用“IP和端口”来表示源或目的,如图4所示:
 图4 网络源和目的
图4 网络源和目的
1.2 网络传输中的2个对象:server和client
我们经常访问网站,这涉及 2 个对象:网站服务器,浏览器。网站服务器平 时安静地呆着,浏览器主动发起数据请求。网站服务器、浏览器可以抽象成 2 个 软件的概念:server 程序、client 程序,如图5所示。
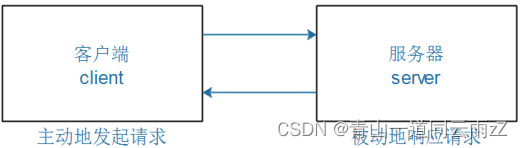 图5 网络客户端和服务器
图5 网络客户端和服务器
1.3 两种传输方式:TCP/UDP
1.TCP和UDP在原理上的区别
TCP 向它的应用程序提供了面向连接的服务。这种服务有 2 个特点:可靠传输、流量控制(即发送方/接收方速率匹配)。它包括了应用层报文划分为短报文, 并提供拥塞控制机制。
UDP 协议向它的应用程序提供无连接服务。它没有可靠性,没有流量控制, 也没有拥塞控制。
2.UDP协议的意义
既然 TCP 提供了可靠数据传输服务,而 UDP 不能提供,那么 TCP 是否总是 首选呢?
答案是否定的,因为有许多应用更适合用 UDP,举个例子:视频通话时,使 用 UDP,偶尔的丢包、偶尔的花屏时可以忍受的;如果使用 TCP,每个数据包都 要确保可靠传输,当它出错时就重传,这会导致后续的数据包被阻滞,视频效果 反而不好。
使用
UDP
时,有如下特点:
① 关于何时发送什么数据控制的更为精细
采用 UDP
时只要应用进程将数据传递给
UDP
,
UDP
就会立即将其传递给网络 层。而 TCP
有重传机制,而不管可靠交付需要多长时间。但是实时应用通常不希 望过分的延迟报文段的传送,且能容忍一部分数据丢失。
② 无需建立连接,不会引入建立连接时的延迟。
③ 无连接状态,能支持更多的活跃客户。
④ 分组首部开销较小。
3.TCP/UDP网络通信大概交互图
 图6 面向连接的TCP流模式
图6 面向连接的TCP流模式
 图7 UDP用户数据包模式
图7 UDP用户数据包模式
2.网络编程主要函数介绍
1.socket函数
int socket(int domain, int type,int protocol);
此函数用于创建一个套接字。
domain 是网络程序所在的主机采用的通讯协族(AF_UNIX 和 AF_INET 等)。AF_UNIX 只能够用于单一的 Unix 系统进程间通信,而 AF_INET 是针对 Internet 的,因而可以允许远程通信使用。
type 是网络程序所采用的通讯协议(SOCK_STREAM,SOCK_DGRAM 等) SOCK_STREAM 表明用的是 TCP 协议,这样会提供按顺序的,可靠,双 向,面向连接的比特流。 SOCK_DGRAM 表明用的是 UDP 协议,这样只会提不可靠,无连接的通 信。 protocol,由于指定了 type,所以这个地方一般只要用 0 来代替就可以了。
此函数执行成功时返回文件描述符,失败时返回-1,看 errno 可知道出错的详细情况。
2.bind函数
int bind(int sockfd, struct sockaddr *my_addr, int addrlen);
此函数用于绑定到一个套接字。
sockfd 是由 socket
函数调用返回的文件描述符。
my_addr 是一个指向
sockaddr
的指针。
addrlen 是
sockaddr
结构的长度。
sockaddr
的定义:
struct sockaddr{
unisgned short as_family;
char sa_data[14];
};
不 过 由 于 系 统 的 兼 容 性 ,
我 们 一 般 使 用 另 外 一 个 结 构
(struct sockaddr_in) 来代替。
sockaddr_in
的定义:
struct sockaddr_in{
unsigned short sin_family;
unsigned short sin_port;
struct in_addr sin_addr;
unsigned char sin_zero[8];
}
如果使用
Internet
所以
sin_family
一般为
AF_INET
。
sin_addr
设置为
INADDR_ANY
表示可以和任何的主机通信。
sin_port 是要监听的端口号。
bind 将本地的端口同
socket
返回的文件描述符捆绑在一起
.
成功是返回
0, 失败的情况和 socket
一样。
3.listen函数
int listen(int sockfd,int backlog);
此函数宣告服务器可以接受连接请求。
sockfd 是
bind
后的文件描述符。
backlog 设置请求排队的最大长度。当有多个客户端程序和服务端相连时,使用这个表示可以介绍的排队长度。
listen 函数将
bind
的文件描述符变为监听套接字,返回的情况和
bind
一样。
4.accept函数
int accept(int sockfd, struct sockaddr *addr,int *addrlen);
服务器使用此函数获得连接请求,并且建立连接。
sockfd 是
listen
后的文件描述符。
addr,
addrlen
是用来给客户端的程序填写的
,
服务器端只要传递指针就可以了, bind,listen
和
accept
是服务器端用的函数。
accept 调用时,服务器端的程序会一直阻塞到有一个客户程序发出了连接。accept 成功时返回最后的服务器端的文件描述符,这个时候服务器端可以向该描述符写信息了,失败时返回-1
。
5.connect函数
int connect(int sockfd, struct sockaddr * serv_addr,int addrlen);
可以用 connect 建立一个连接,在 connect 中所指定的地址是想与之通信的服务器的地址。
sockfd 是
socket
函数返回的文件描述符。
serv_addr 储存了服务器端的连接信息,其中
sin_add
是服务端的地址。
addrlen 是
serv_addr
的长度
connect 函数是客户端用来同服务端连接的
.
成功时返回
0
,
sockfd
是同服务端通讯的文件描述符,失败时返回-1
。
6.send函数
ssize_t send(int sockfd, const void *buf, size_t len, int flags);
sockfd 指定发送端套接字描述符;
buf 指明一个存放应用程序要发送数据的缓冲区;
len 指明实际要发送的数据的字节数;
flags 一般置
0
。
客户或者服务器应用程序都用 send
函数来向
TCP
连接的另一端发送数据
7.recv函数
ssize_t recv(int sockfd, void *buf, size_t len, int flags);
sockfd 指定接收端套接字描述符;
buf 指明一个缓冲区,该缓冲区用来存放
recv
函数接收到的数据;
len 指明
buf
的长度;
flags 一般置
0
。
客户或者服务器应用程序都用 recv 函数从
TCP
连接的另一端接收数据。
8.recvfrom函数
ssize_t recvfrom(int sockfd, void *buf, size_t len, int flags,struct sockaddr *src_addr, socklen_t *addrlen);
recvfrom 通常用于无连接套接字,因为此函数可以获得发送者的地址。
src_addr 是一个 struct sockaddr 类型的变量,该变量保存源机的 IP 地 址及端口号。
addrlen 常置为
sizeof
(
struct sockaddr
)。
9.sendto函数
ssize_t sendto(int sockfd, const void *buf, size_t len, int flags,const struct sockaddr *dest_addr, socklen_t addrlen);
sendto 和 send 相似,区别在于 sendto 允许在无连接的套接字上指定一个目标地址。
dest_addr 表示目地机的
IP
地址和端口号信息,
addrlen 常常被赋值为
sizeof
(
struct sockaddr
)。
sendto 函数也返回实际发送的数据字节长度或在出现发送错误时返回
-1
。
三、多线程编程
具体讲解见韦东山《嵌入式Linux应用开发完全手册V5.1_IMX6ULL_Mini开发板》P253—P274。这里只做总结。
1.线程使用
多线程的创建流程如图 8 所示,首先需要创建线程,一旦线程创 建完成后,线程与线程之间会发生竞争执行,抢占时间片来执行线程逻辑。在 创建线程时候,可以通过创建线程的第四个参数传入参数,在线程退出时亦可 传出参数被线程回收函数所回收,获取到传出的参数。
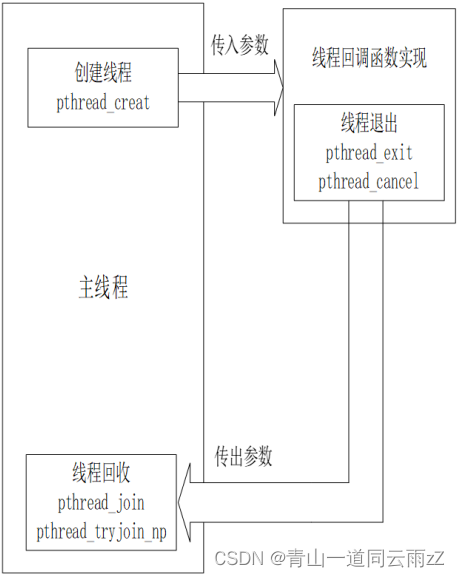 图8 线程使用流程图
图8 线程使用流程图
2.互斥量使用
当多个线程出现后,会遇到同时操作临界公共资源的问题,当线程操作公 共资源时需要对线程进行保护加锁,防止其与线程在此线程更改变量时同时更 改变量,待逻辑执行完毕后再次解锁,使其余线程再度开始竞争。互斥锁创建 流程图如图9所示。
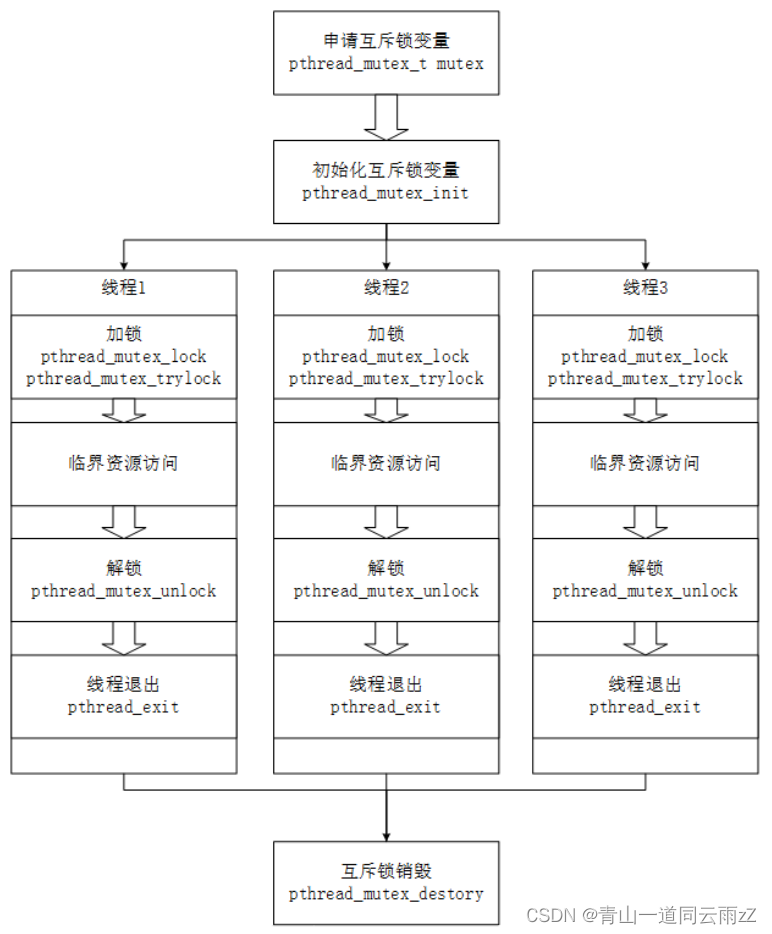 图9 互斥量使用流程图
图9 互斥量使用流程图
3.信号量使用
当多个线程出现后,同时会遇到无序执行的问题。有时候需要对线程的执 行顺序做出限定,变引入了信号量,通过 PV 操作来控制线程的执行顺序,如图10 所示。
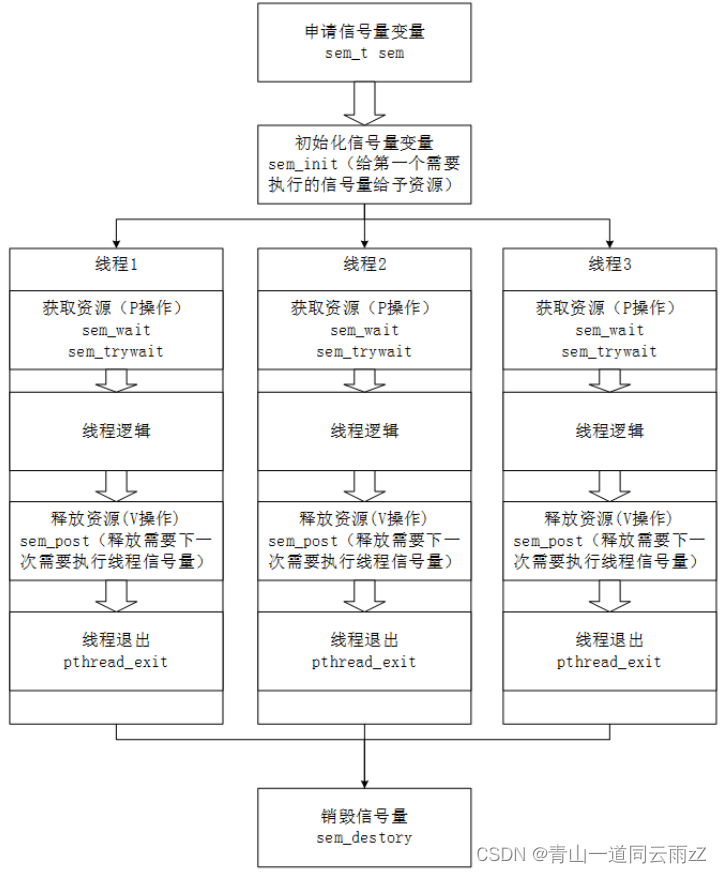 图10 信号量使用流程图
图10 信号量使用流程图
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)