经上篇博客安装好系统后,
先不要拔出SD卡,因为树莓派默认不开启ssh,所以先打开SD卡在里面新建文件命名为 ssh (一定要小写),然后找到cmdline.txt文件打开并在开头写入 ip=192.168.137.1,保存拔出SD卡放到树莓派上。
在开启树莓派前,先找到电脑(我的是win10)的设置》网络和Internet》以太网(win7为本地连接)》更改适配器选项,找到以太网

右击》属性,找到TCP/IPv4,点击属性
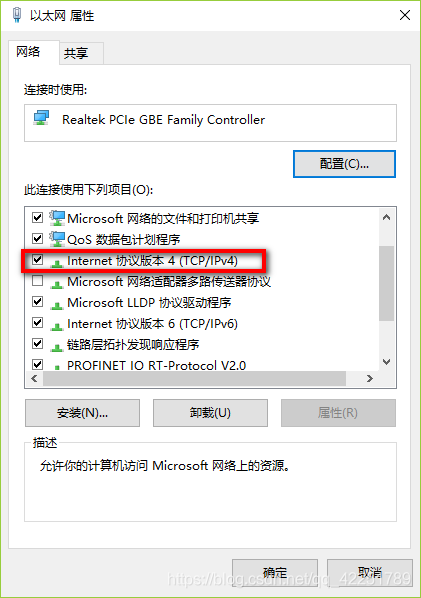
设置如下,然后点击确定保存即可。

开启树莓派,用网线连接树莓派3和电脑,下载两个工具,
提取码:hh1d
分别是 putty(用于ssh连接)和 VNC viewer(用于图形界面),
打开putty,在红框内输入192.168.137.1,点击Open
出现如下画面则表示连接成功,如果每连成功多细看上面的步骤
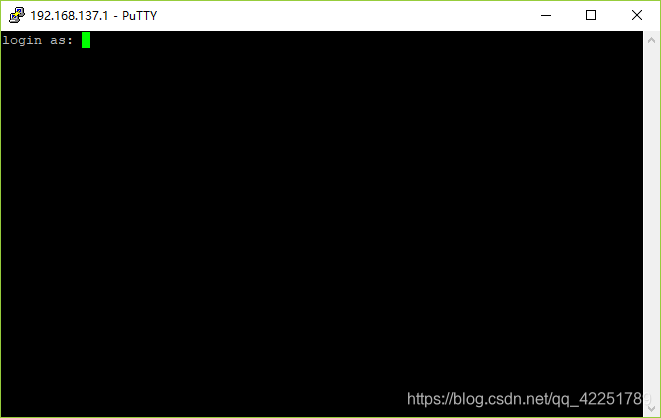
树莓派初始账户: pi 密码:raspberry
登陆成功后,接下来就是连接WIFI了
在命令行输入sudo vi /etc/wpa_supplicant/wpa_supplicant.conf
在文件末尾输入如下:

保存退出过几秒就可以连上了,可以输入sudo apt-get update测试一下,如果没连上重启在试一试。
关于vi,如果出现上下左右键乱码,可以输入 vi /etc/vim/vimrc.tiny
将 set compatible 更改为 set nocompatible
增加一行 set backspace=2
修改完如下:

为了网速更快,可以将apt软件源更改成中科大的
输入如下:sudo nano /etc/apt /sources.list
将原来的用 # 号注释掉,并在末尾粘贴
deb http://mirrors.ustc.edu.cn/raspbian/raspbian/ stretch main contrib non-free rpi
然后ctrl + O保存,回车,ctrl+X退出
还需更改如下文件
nano /etc/apt/sources.list.d/raspi.list
将原理的注释掉,在末尾添加
deb http://mirrors.ustc.edu.cn/archive.raspberrypi.org/ stretch main ui
保存退出即可
最后sudo apt-get update 和sudo apt-get upgrade更新即可
接下来就需要安装VNC了,
先开启树莓派的VNC
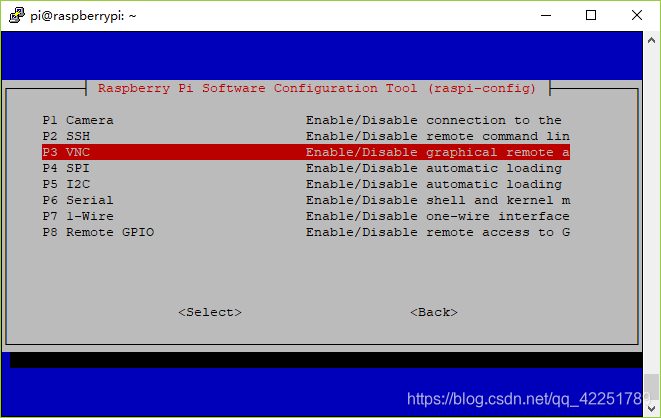
输入:sudo raspi-config
找到interfacing Options并进入找到VNC回车确认开启
安装:sudo apt-get install tightvncserver
设置密码: vncpasswd
设置开启自启动:sudo nano /etc/init.d/tightvncserver
### BEGIN INIT INFO
# Provides: tightvncserver
# Required-Start: $local_fs
# Required-Stop: $local_fs
# Default-Start: 2 3 4 5
# Default-Stop: 0 1 6
# Short-Description: Start/stop tightvncserver
### END INIT INFO
# More details see:
# http://www.penguintutor.com/linux/tightvnc
### Customize this entry
# Set the USER variable to the name of the user to start tightvncserver under
export USER='pi'
### End customization required
eval cd ~$USER
case "$1" in
start)
# 启动命令行。此处自定义分辨率、控制台号码或其它参数,
# 800x600可以定义成自己电脑的分辨率
su $USER -c '/usr/bin/tightvncserver -depth 16 -geometry 800x600 :1'
echo "Starting TightVNC server for $USER "
;;
stop)
# 终止命令行。此处控制台号码与启动一致。
su $USER -c '/usr/bin/tightvncserver -kill :1'
echo "Tightvncserver stopped"
;;
*)
echo "Usage: /etc/init.d/tightvncserver {start|stop}"
exit 1
;;
esac
exit 0
退出保存,然后输入
sudo chmod 777 /etc/init.d/tightvncserver
sudo update-rc.d tightvncserver defaults
开启自启
在PC端打开VNC viwer,输入如下,注意IP地址后面的 :1
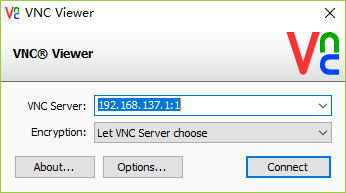
点击connect即可,出现如下画面就说明成功了
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)