一、确定自己的Ubuntu版本号,并且安装正确的ros版本
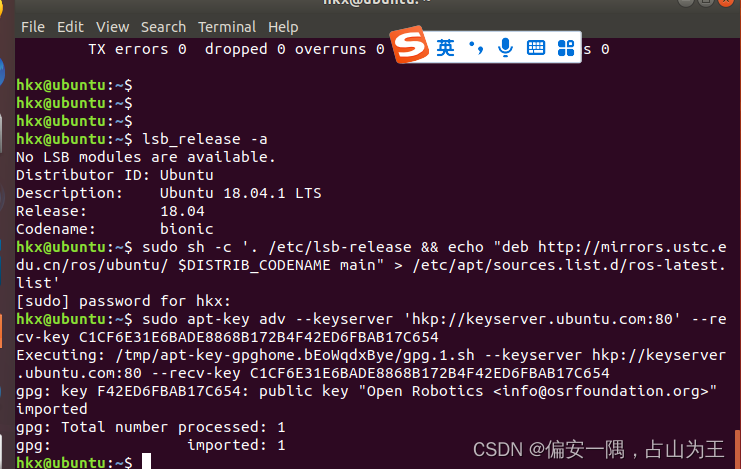
lsb_release -a 查看ubuntu版本

二、更新源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
或者
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
三、设置密钥
这里可能有网络问题,换成手机热点就可以解决
gpg: 从公钥服务器接收失败:Server indicated a failure
可能是网络的原因,检查一下
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
四、安装ros
Ubuntu16的话,安装这个版本ROS,即使用下列命令行
sudo apt-get update
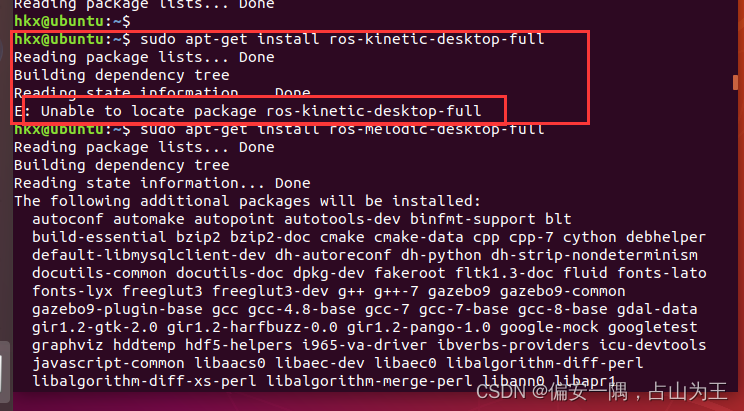
sudo apt-get install ros-kinetic-desktop-full
我的Ubuntu是18.04,安装错了版本
 Ubuntu18的话,安装这个版本ROS
Ubuntu18的话,安装这个版本ROS
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
E: 无法定位软件包 ros-kinetic-desktop-full
版本不对
lsb_release -a 查看ubuntu版本
五、安装完成后,可以用下面的命令来查看可使用的包:
不同版本,这里不一样ros-kinetic
apt-cache search ros-kinetic
六、配置ROS环境到系统
首先呢,需要先初始化 rosdep,rosdep 让你能够轻松地安装被想要编译的 源代码,或被某些 ROS 核心组件需要的系统依赖。然后初始化环境变量, 在终端依次输入下面指令。
sudo rosdep init
rosdep update
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
下面解决一下执行上述语句遇到的问题:
6.1 sudo rosdep init的其他解决办法,
在 rosdep 初始化时,多半会抛出异常。
进入"/usr/lib/python3/dist-packages/" 查找rosdep中和raw.githubusercontent.com相关的内容,调用命令:
find . -type f | xargs grep "raw.githubusercontent"
修改相关文件,主要有: ./rosdistro/__init__.py、./rosdep2/gbpdistro_support.py、./rosdep2/sources_list.py 、./rosdep2/rep3.py。可以使用sudo gedit命令修改文件:
文件中涉及的 URL 内容,如果是:raw.githubusercontent.com/ros/rosdistro/master都替换成步骤1中准备的gitee.com/zhao-xuzuo/rosdistro/raw/master即可。
原文链接:https://blog.csdn.net/DemoFY/article/details/127240083
这里用的哪里的源,修改为什么
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

init成功

下图的问题,可通过修改该目录下下载源20-default.list文件可解决

6.1 sudo rosdep init
问题描述1:

问题解决 :
20210831解决 rosdep init 错误的核武器 - 知乎 (zhihu.com)
sudo apt-get install python3-pip
sudo pip3 install rosdepc
sudo pip3 install rosdepc

问题描述2:

这个问题原因在于,20-default.list在你的系统中已经存在,删除掉:
问题解决:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
6.2 rosdep_update问题,各种链接网页失败
解决6.1(1)后,输入
sudo rosdepc init
rosdepc update
则可以正常更新
补充:
出现错误:
hkx@ubuntu:~$ rosdepc update
命令 'rosdepc' 可在 '/usr/local/bin/rosdepc' 处找到
由于/usr/local/bin 不在PATH 环境变量中,故无法找到该命令。
rosdepc:未找到命令
解决办法:cd到相应目录,再执行update就可以了
hkx@ubuntu:~$ cd /usr/local/bin
6.3 source ~/.bashrc
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
问题描述:

解决方法:
删除该文件下面的几个source,然后重新echo,source
gedit ~/.bashrc
七、验证ROS
关于ROS的启动,我们需要在启动终端窗口的时候,生效一下我们的ROS功能内径, 但是每次打开一个窗口手动生效依次很麻烦,所有我们将需要生效的内容放在~/.bashrc文 件内,这样在每次启动终端的时候就可以自动生效了。记得执行source ~/.bashrc更新一下 当前的环境变量哈。
roscore
出现问题:
目录下有roscore,但是运行却报错。如果没有,就执行sudo apt-get install ros-melodic-desktop。
有,就是环境问题,解决source之后就可以正常使用了


在此之前,我们安装一些ros的依赖
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
然后我们来启动一个小海龟的例程。新打开一个终端,输入:
rosrun turtlesim turtlesim_node
即可出现一个小海龟的画面。
我们再打开一个终端,输入
rosrun turtlesim turtle_teleop_key
来启动键盘控制,通 过↑、↓、←、→来控制小乌龟的移动。
我们可以看到,在小海龟的gui头“撞墙”的时候,我们的turtlesim_node节点(咳咳,概念型的请继续关注接下来的内容)会有提示数据的输出。
我们可以再开启一个终端,查看一下节点关系和话题列表
rqt_graph
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)