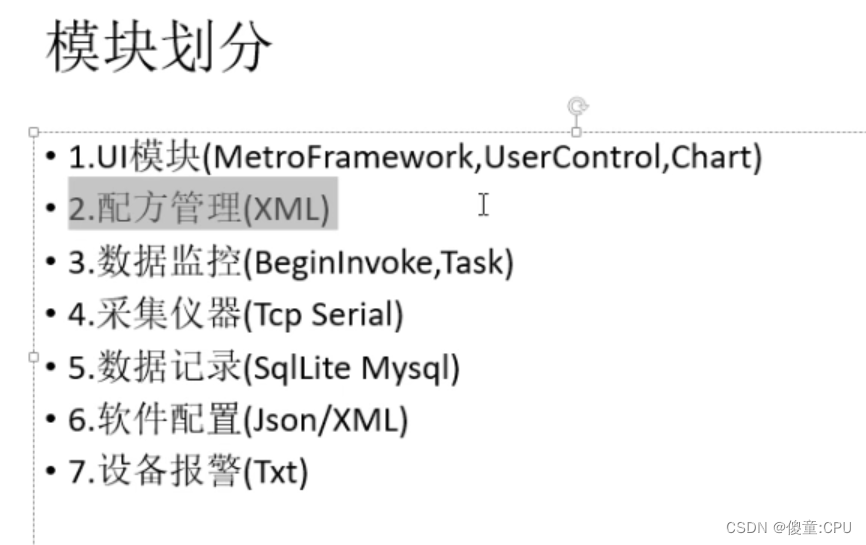
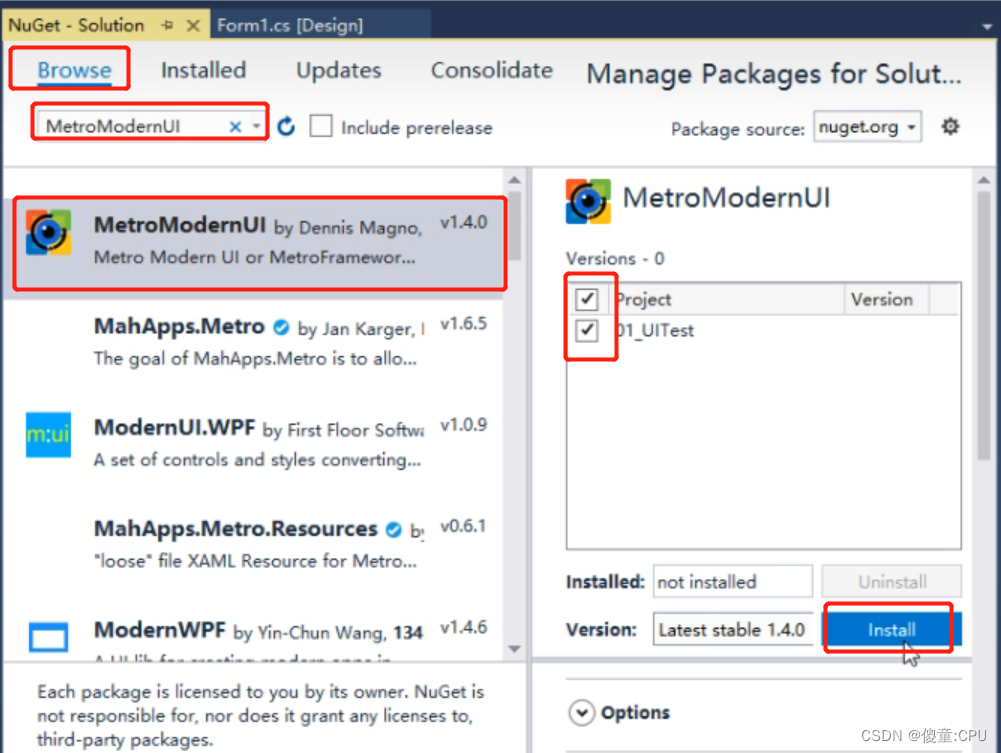
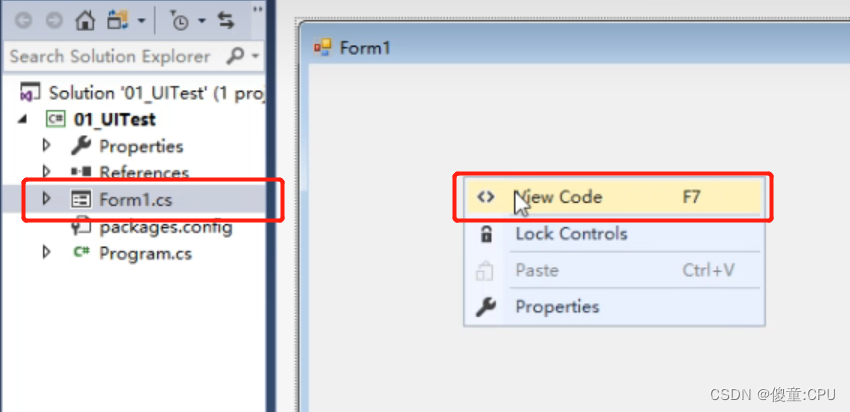
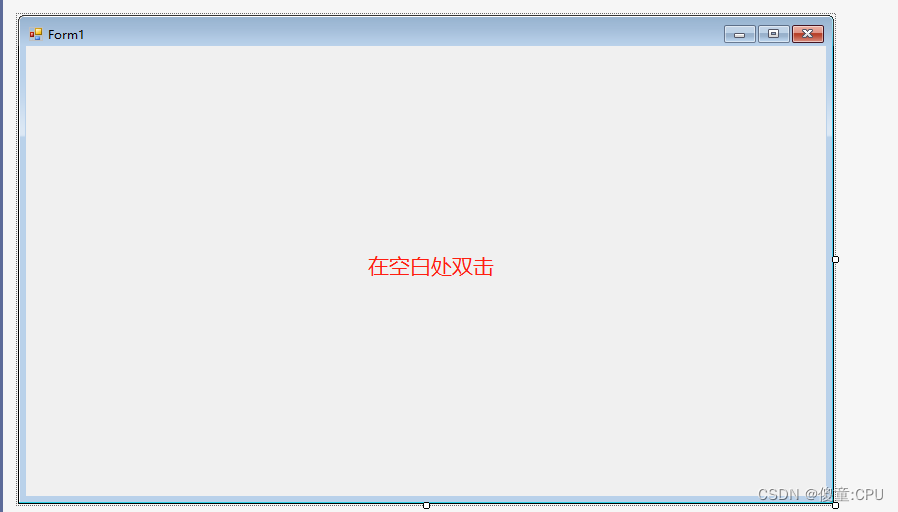
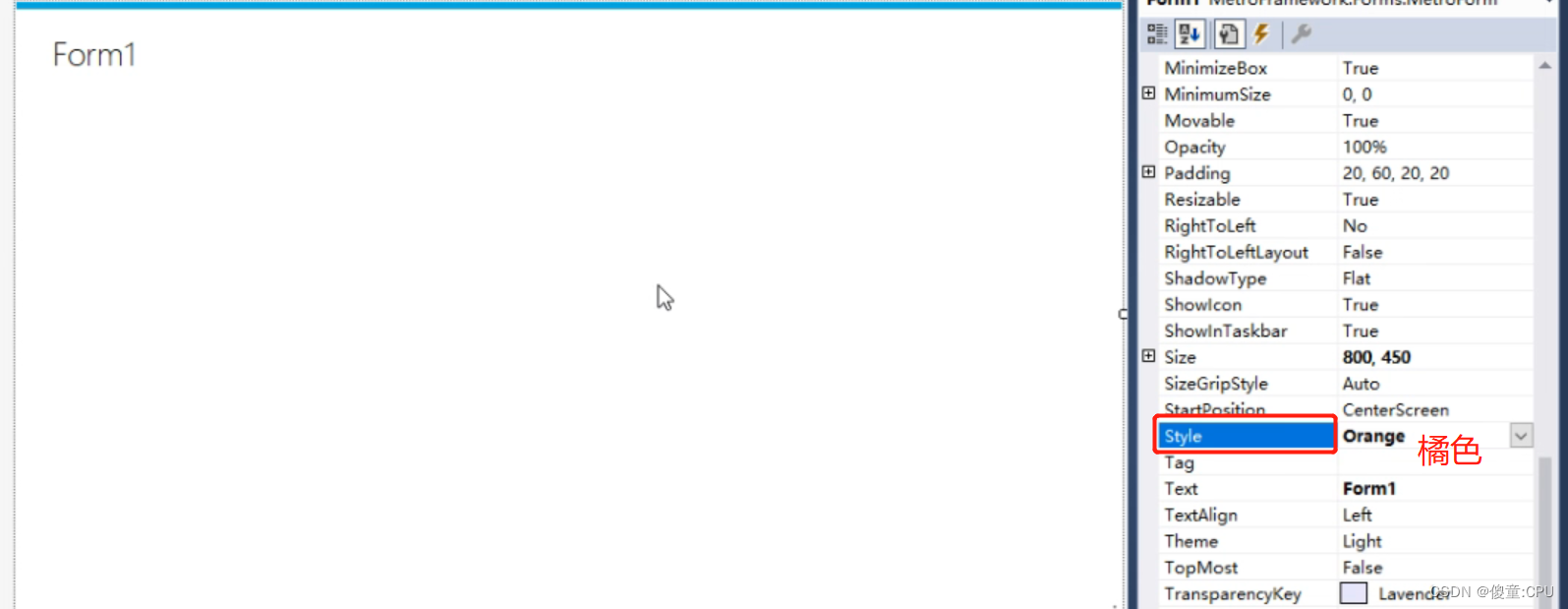
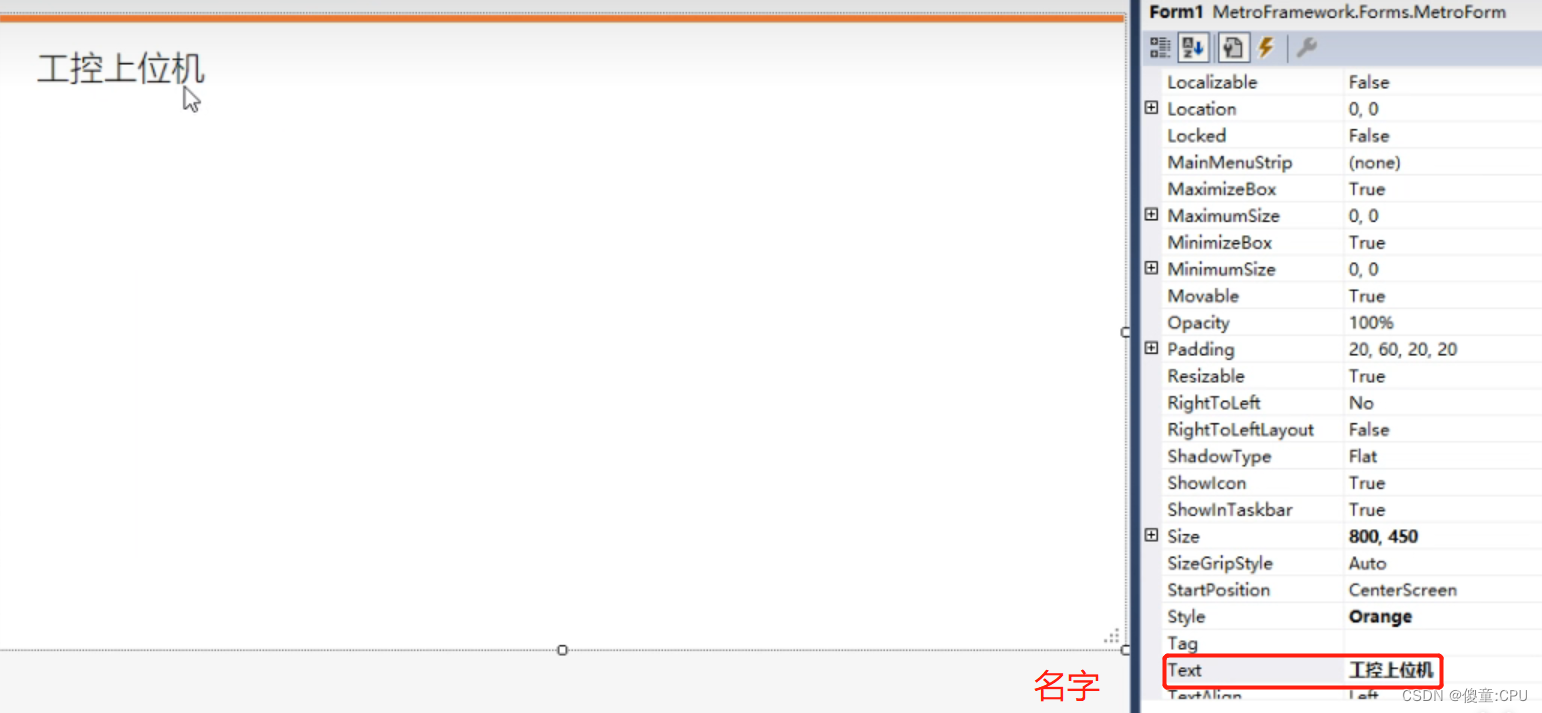
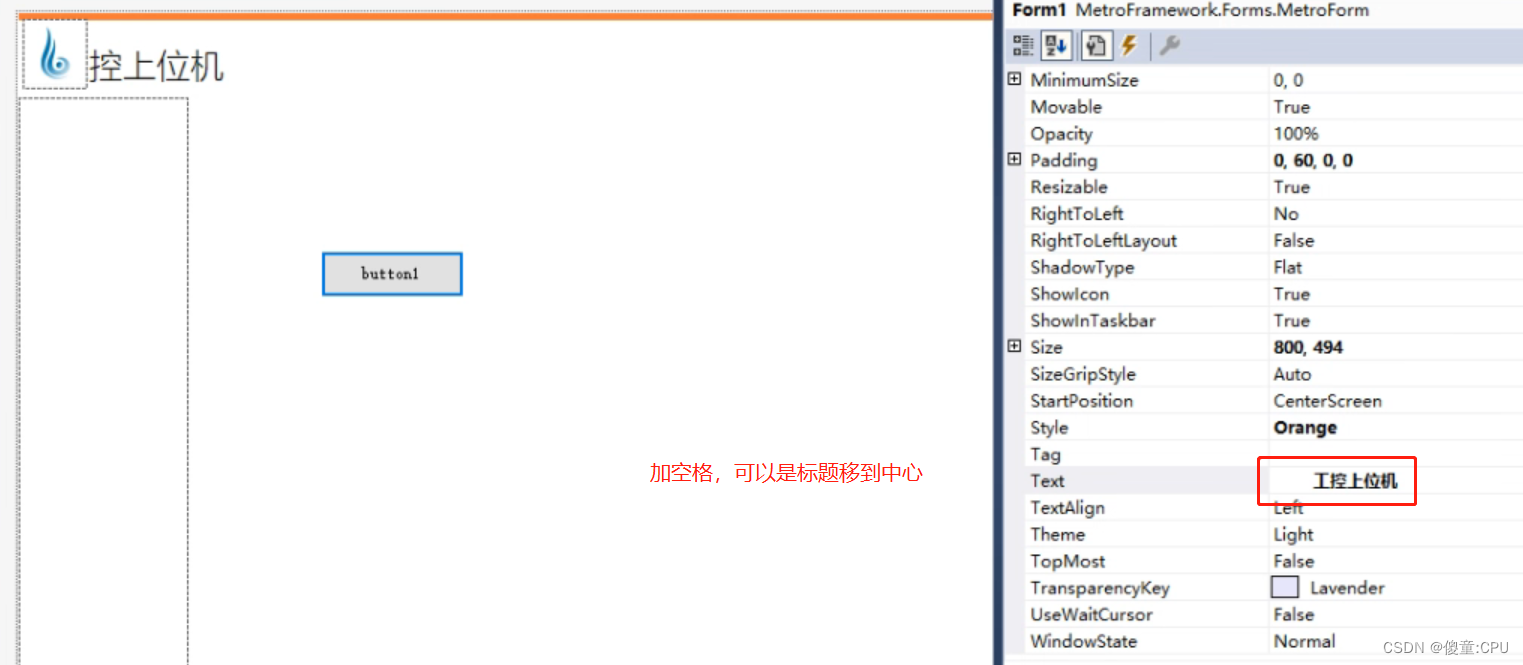
第一部分:UI模块
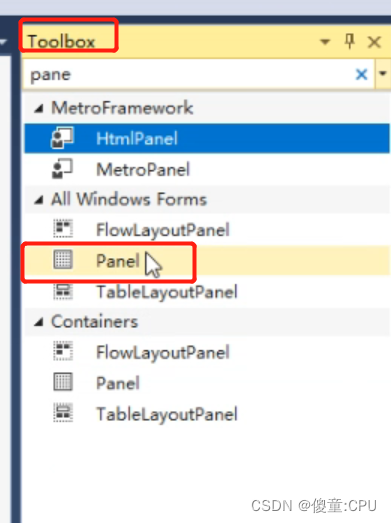
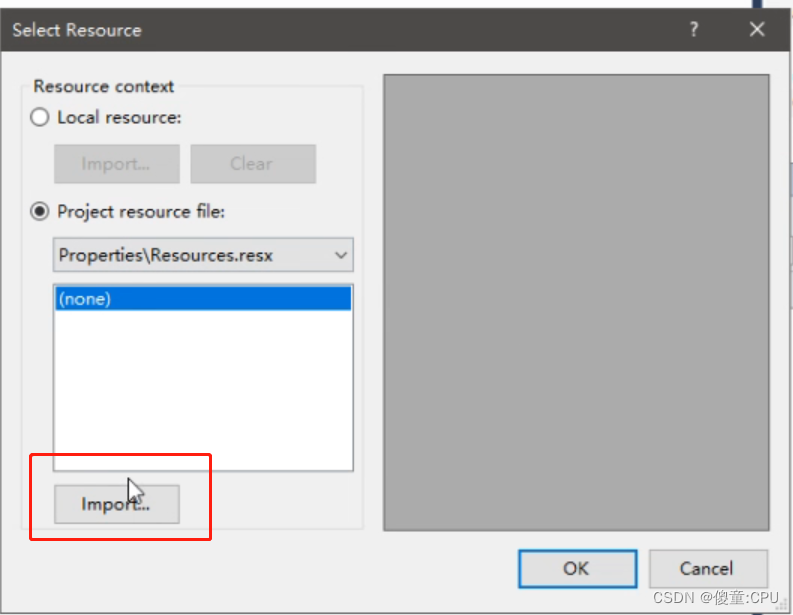
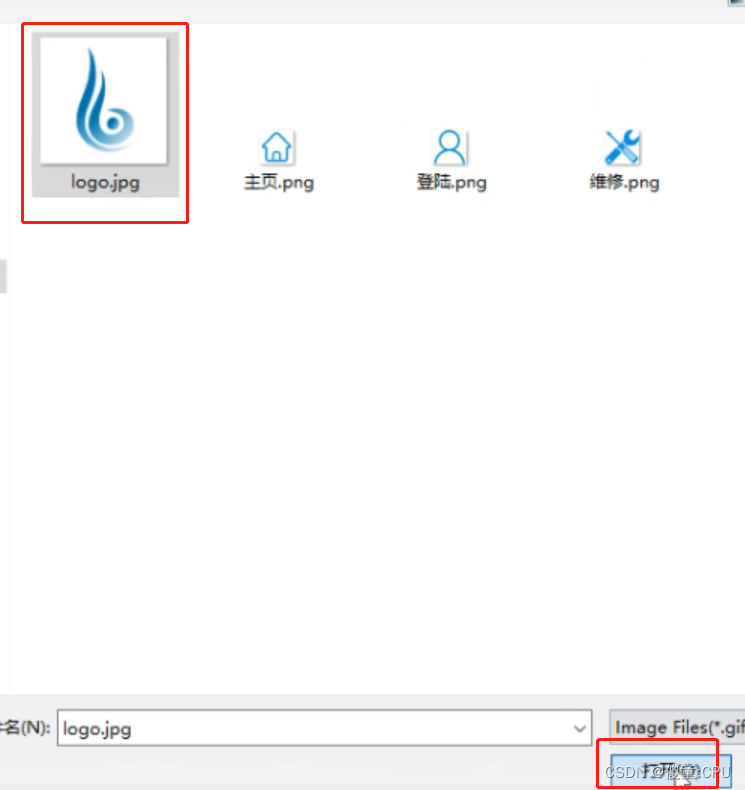
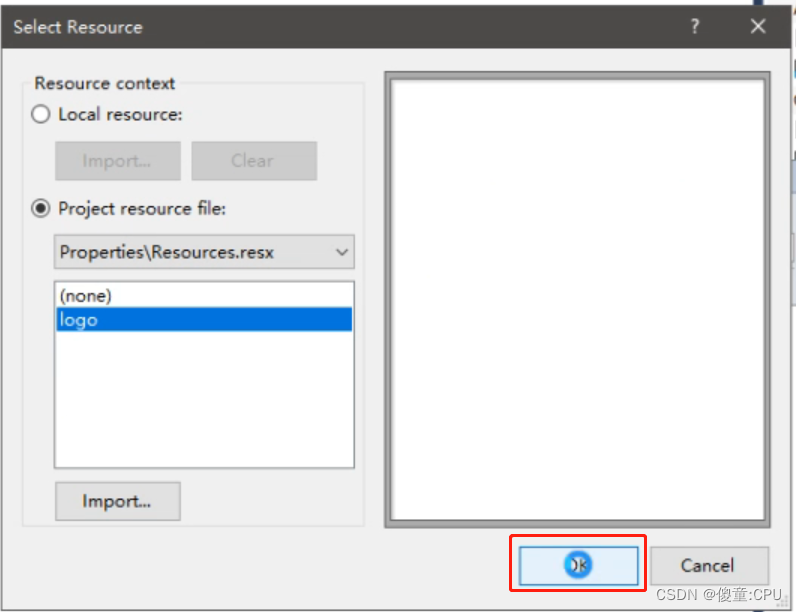
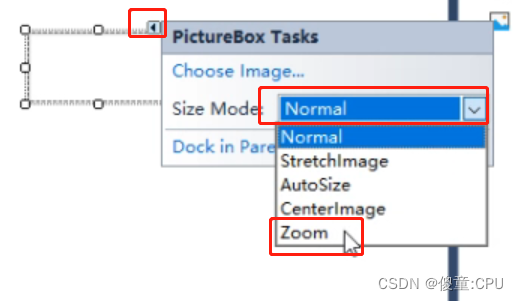
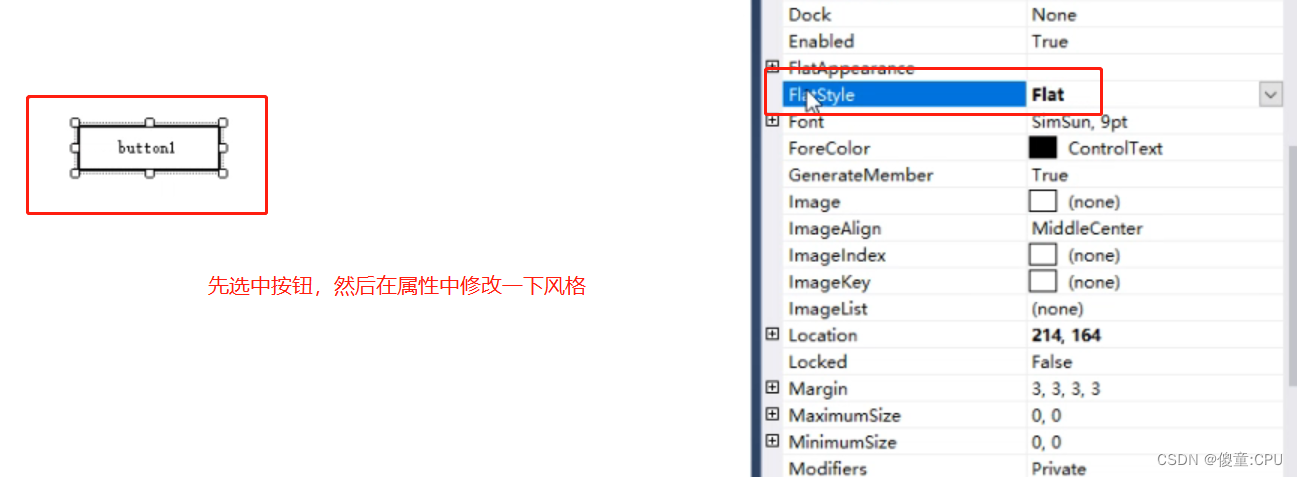
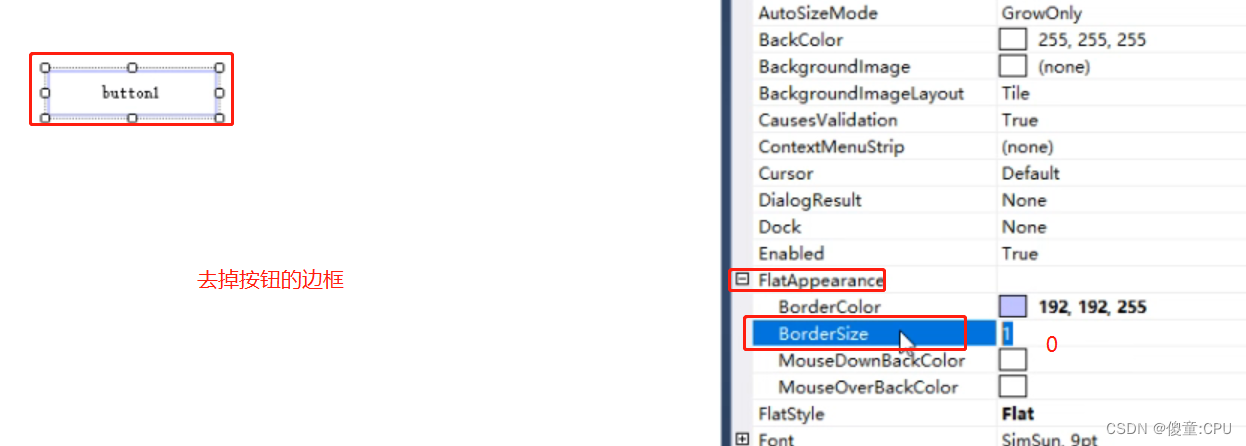
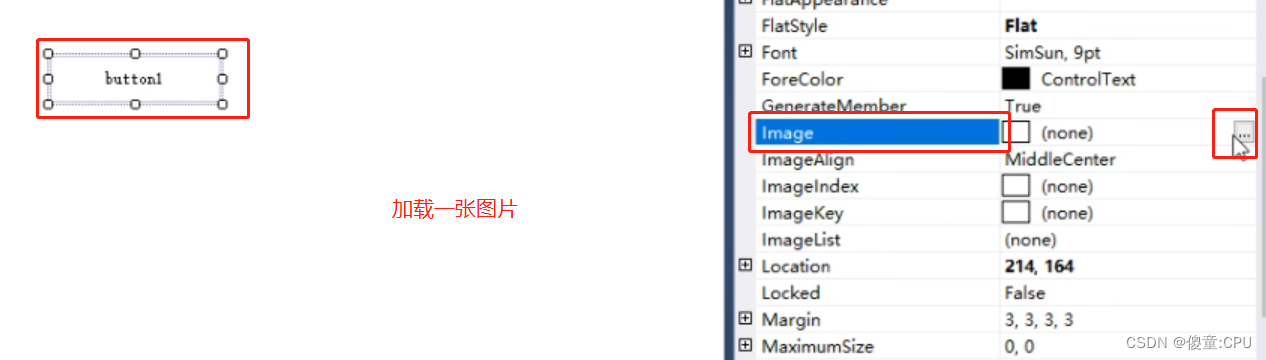
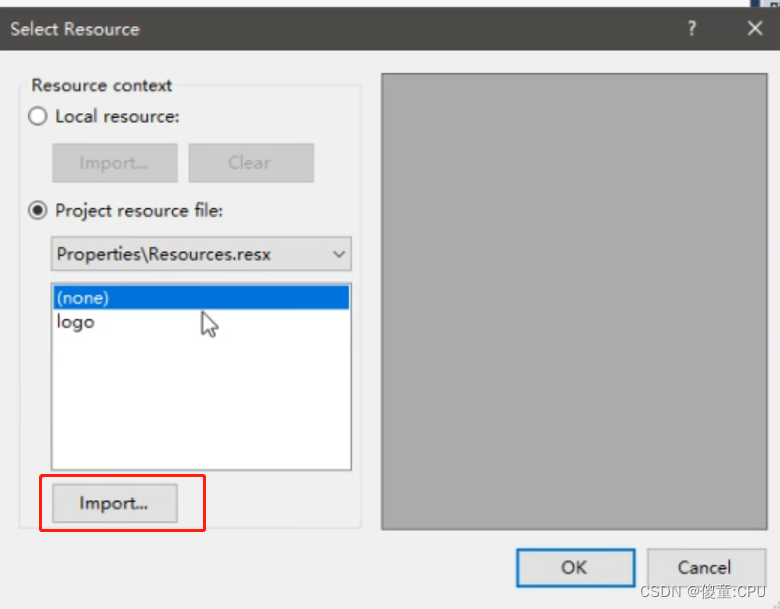
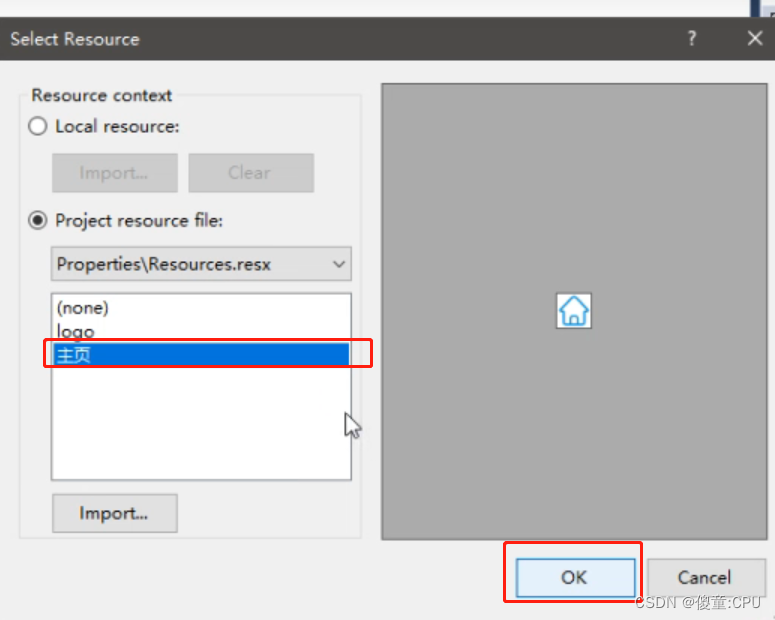
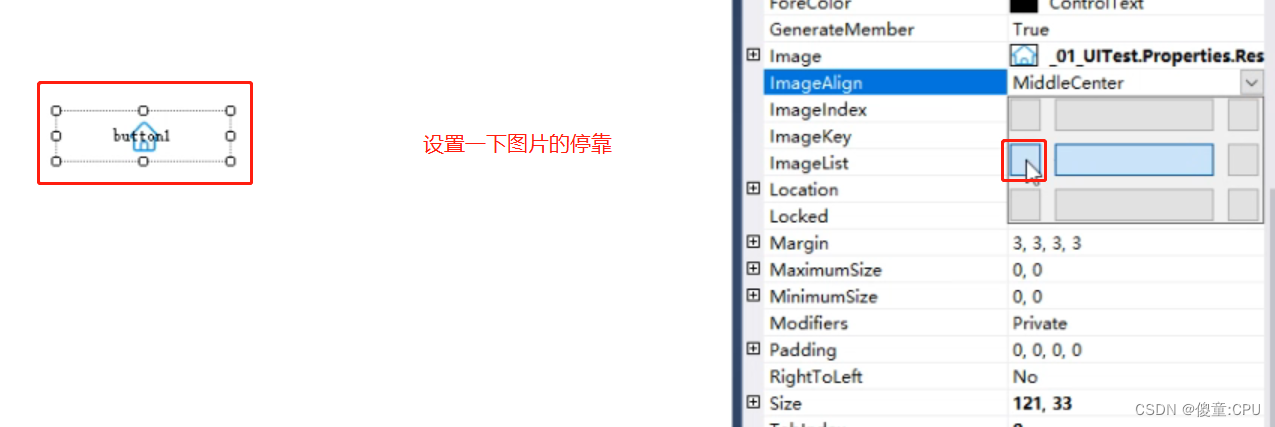
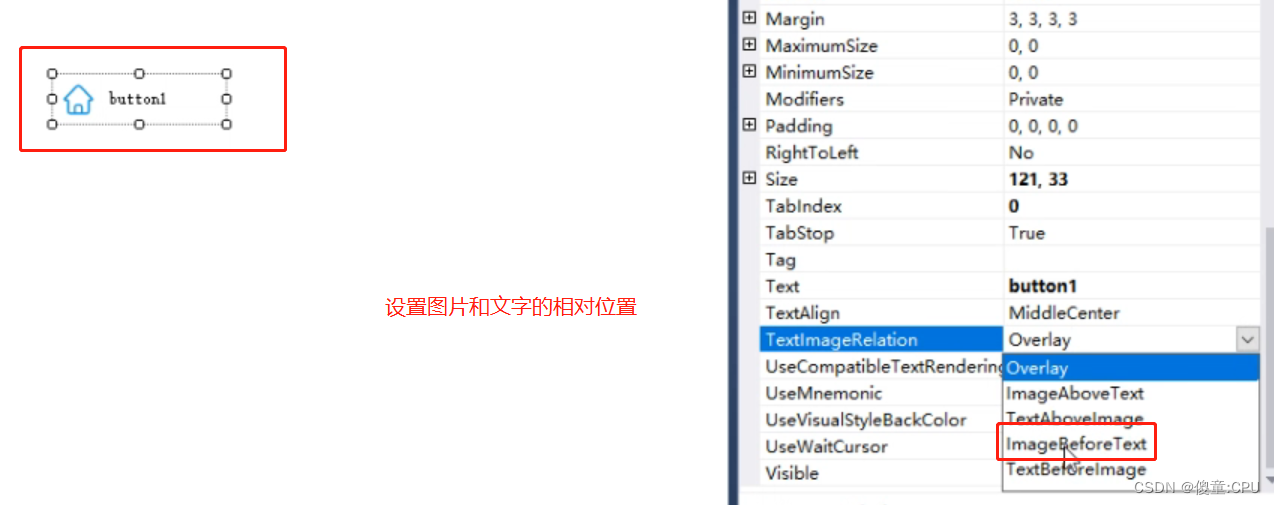
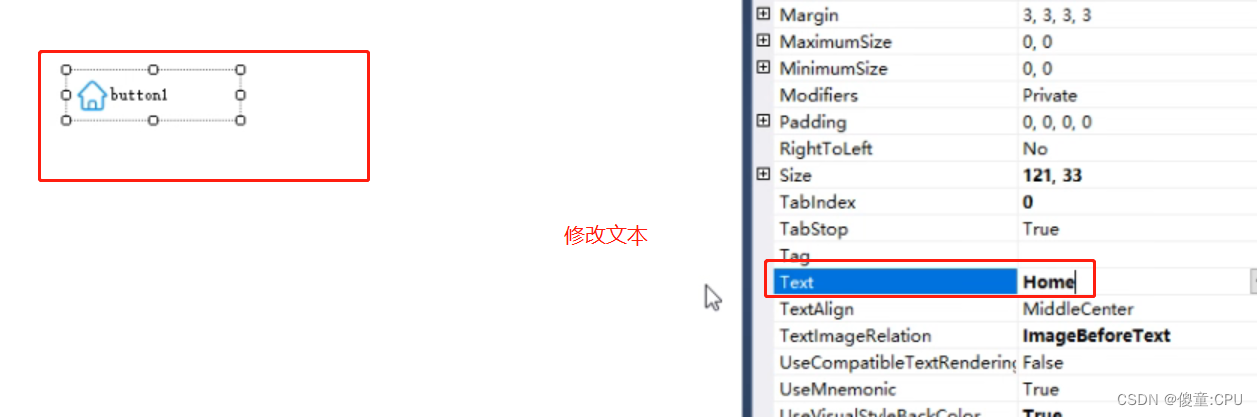
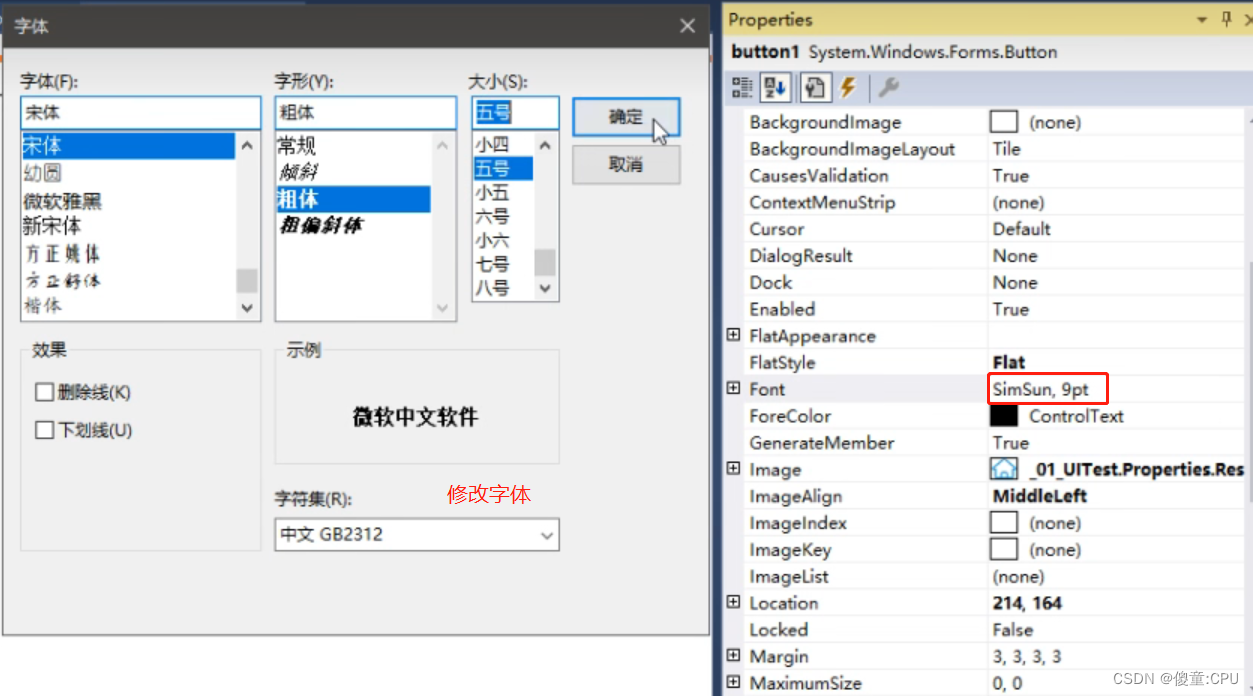
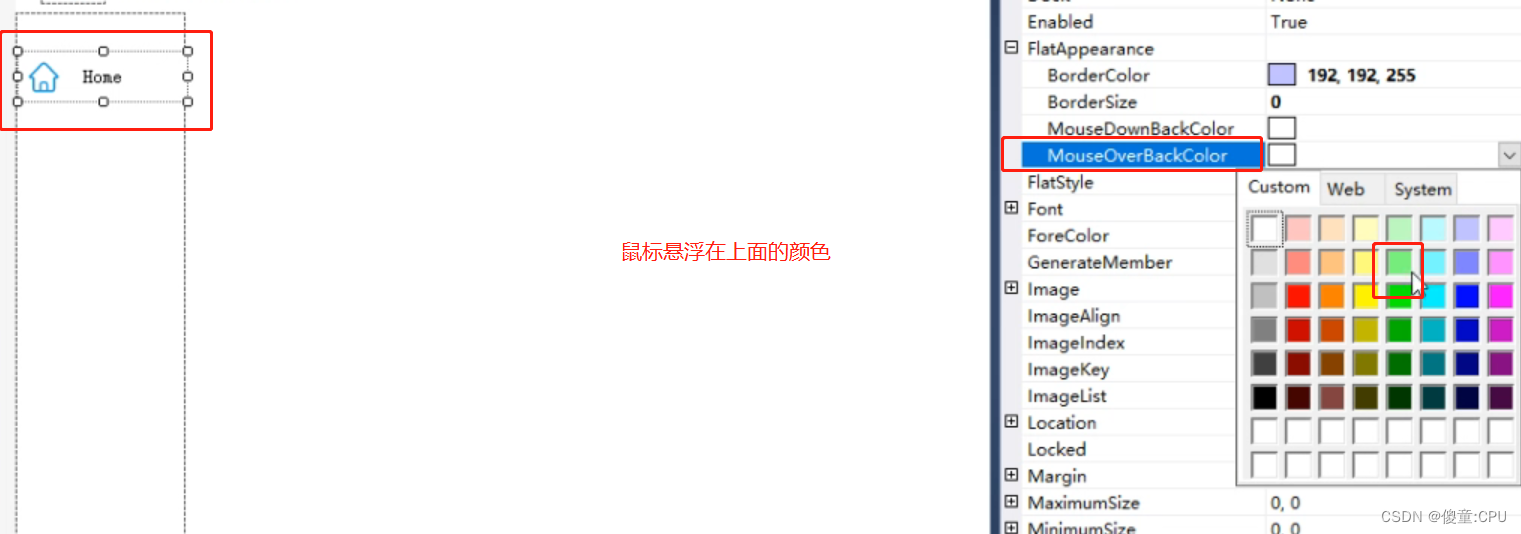
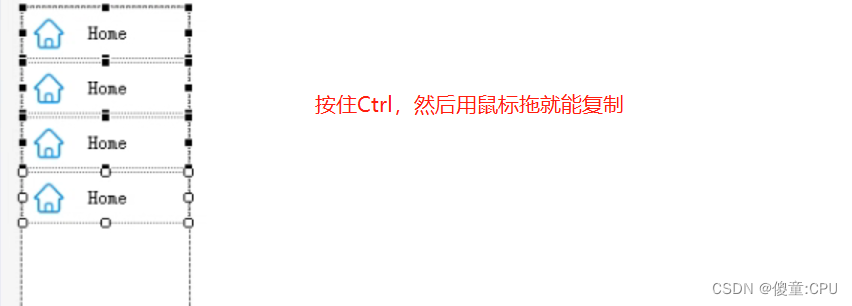
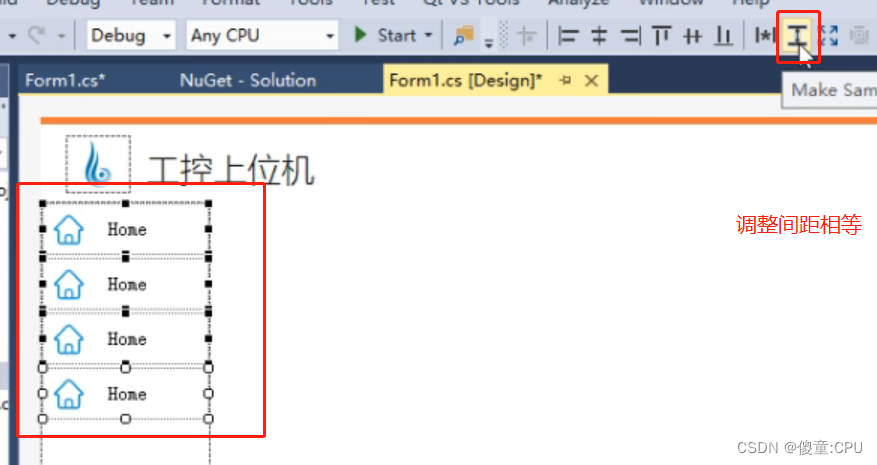
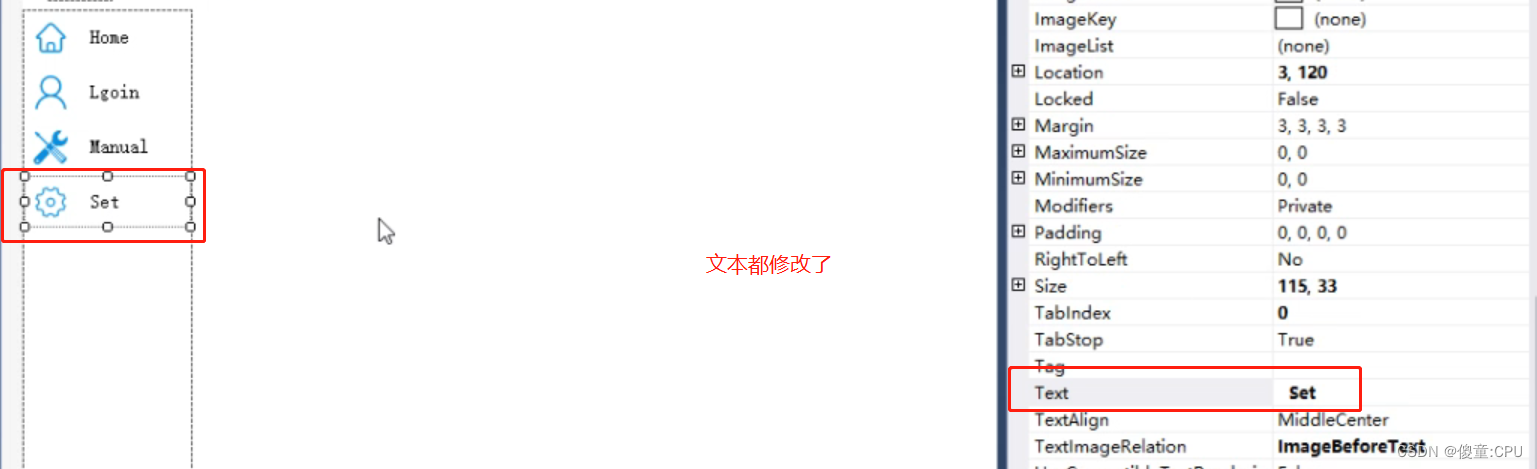
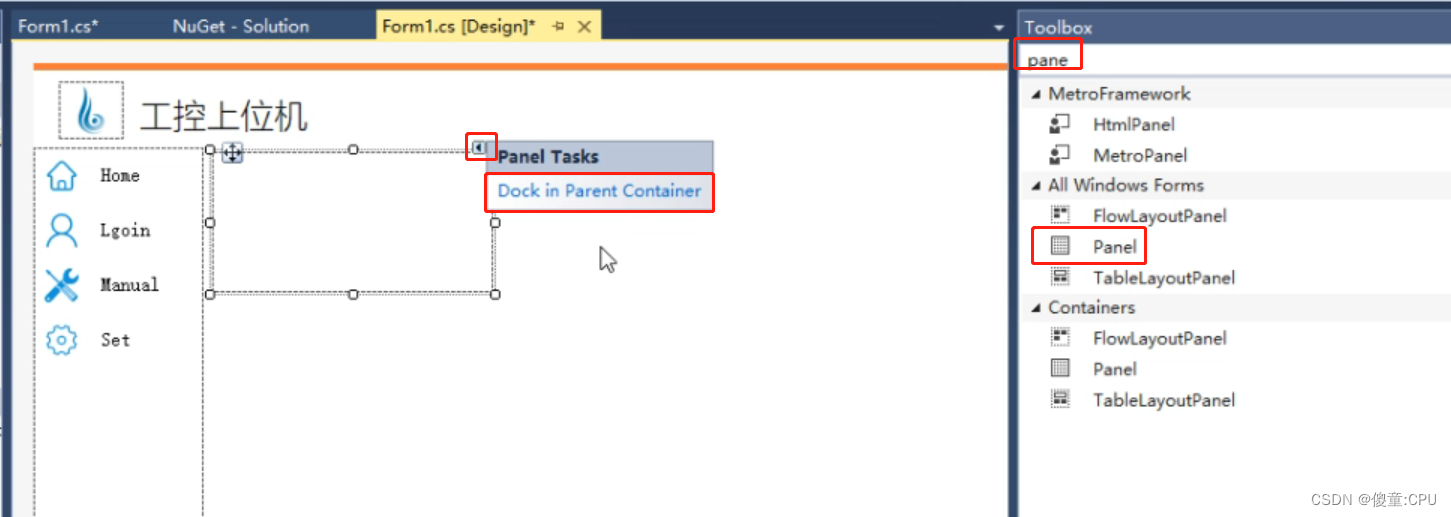
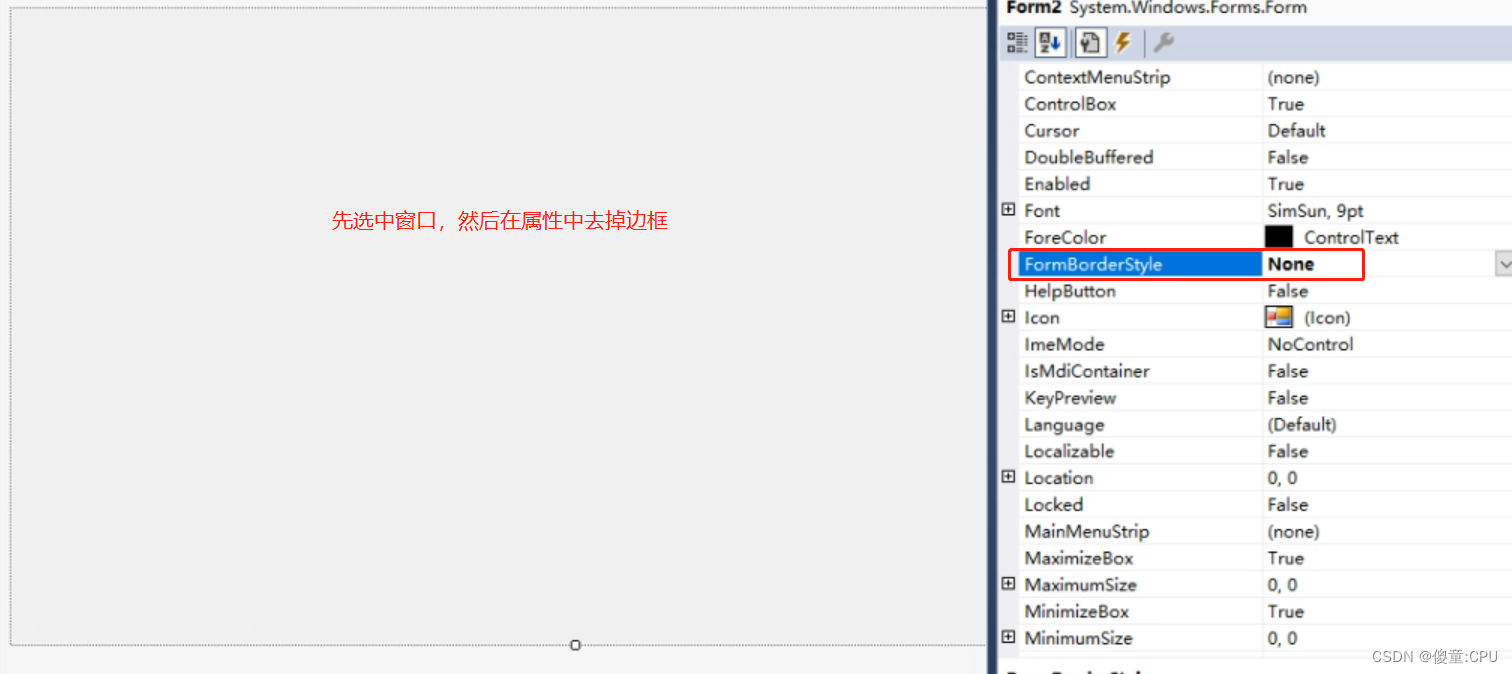
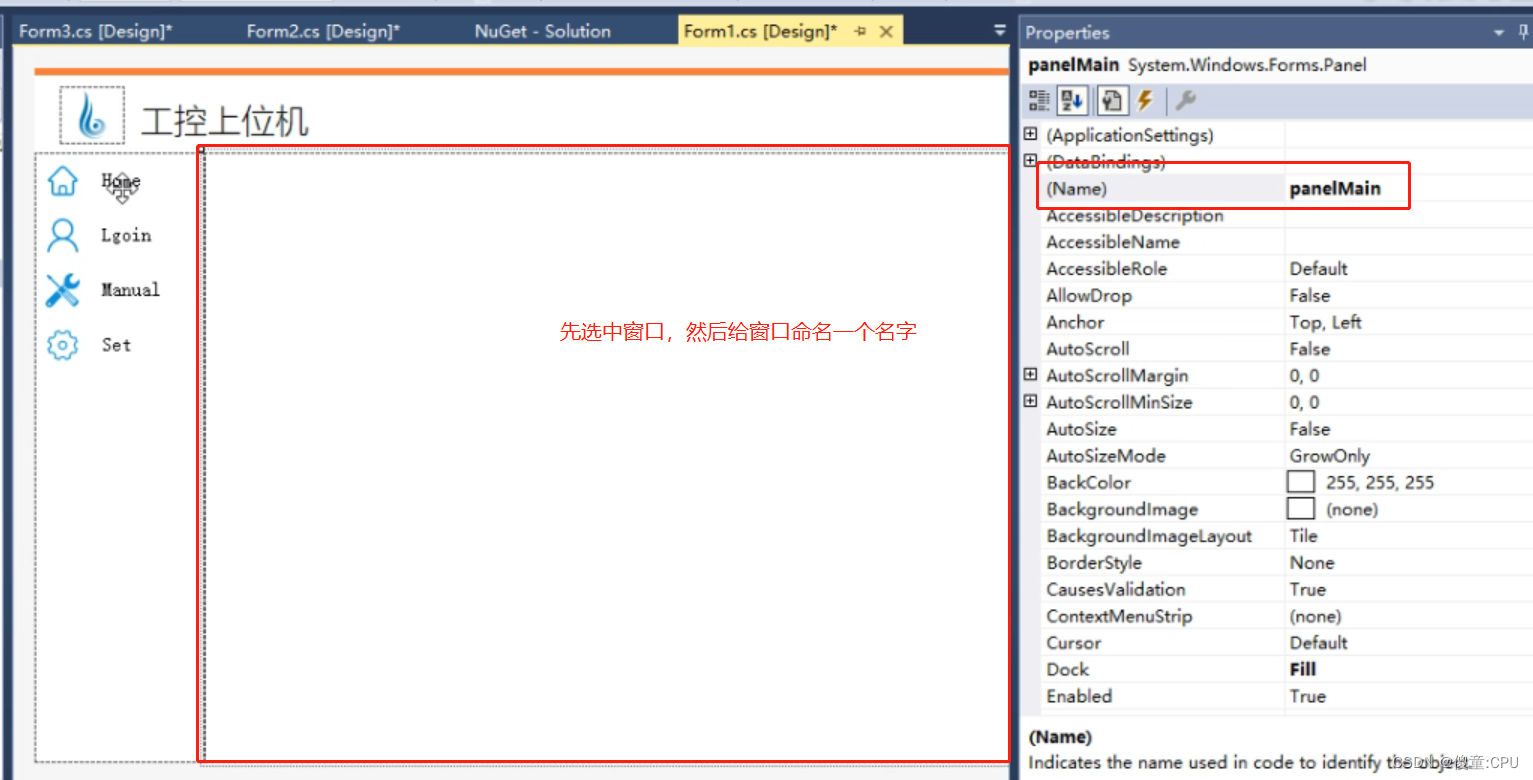
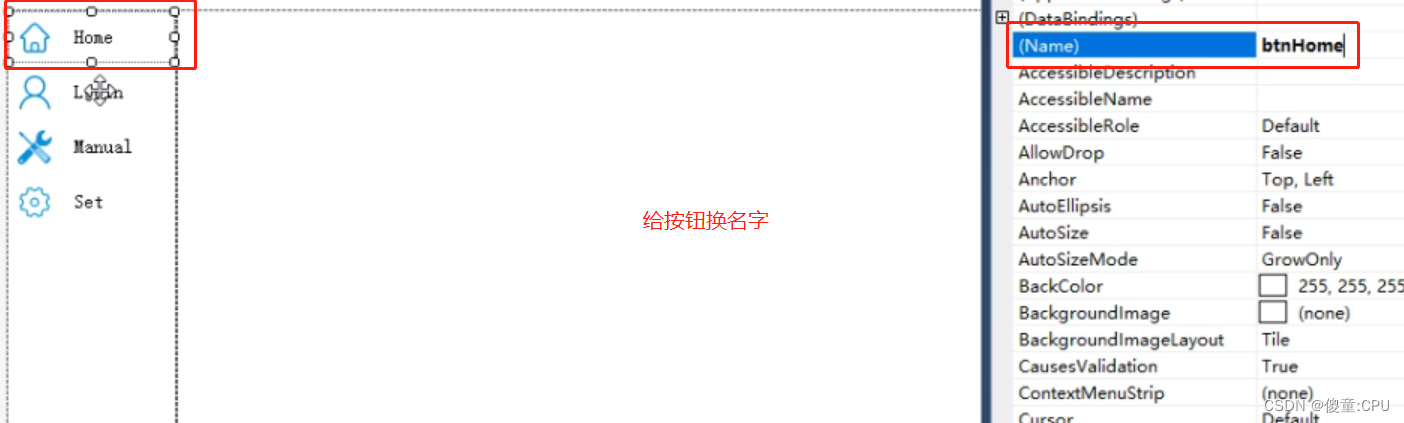
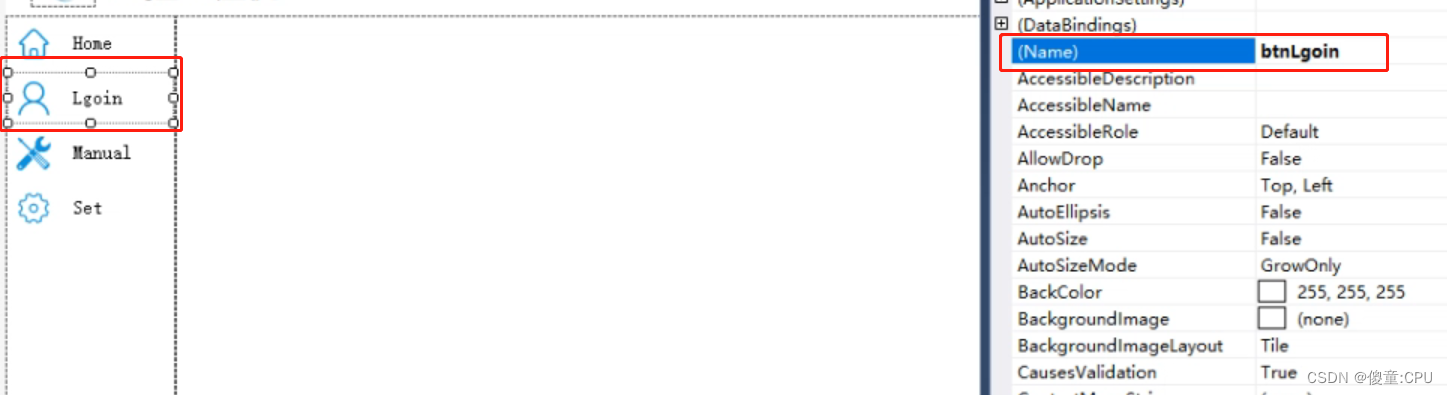
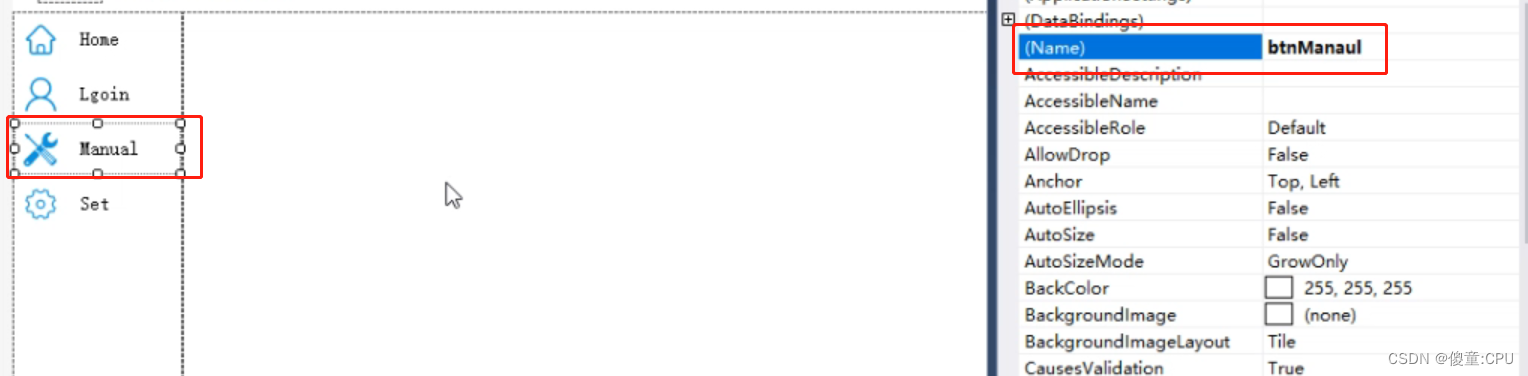
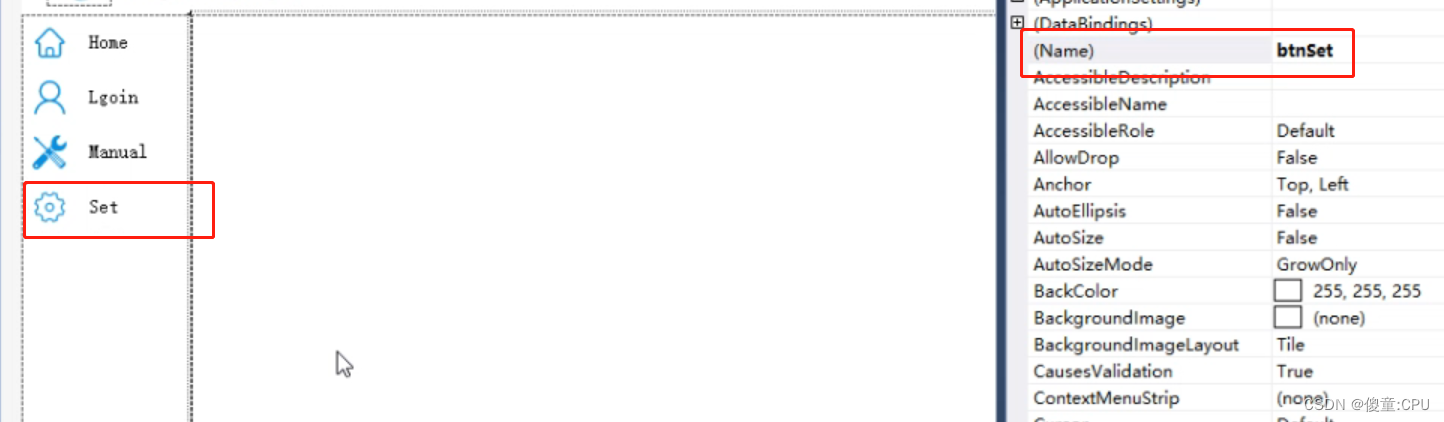
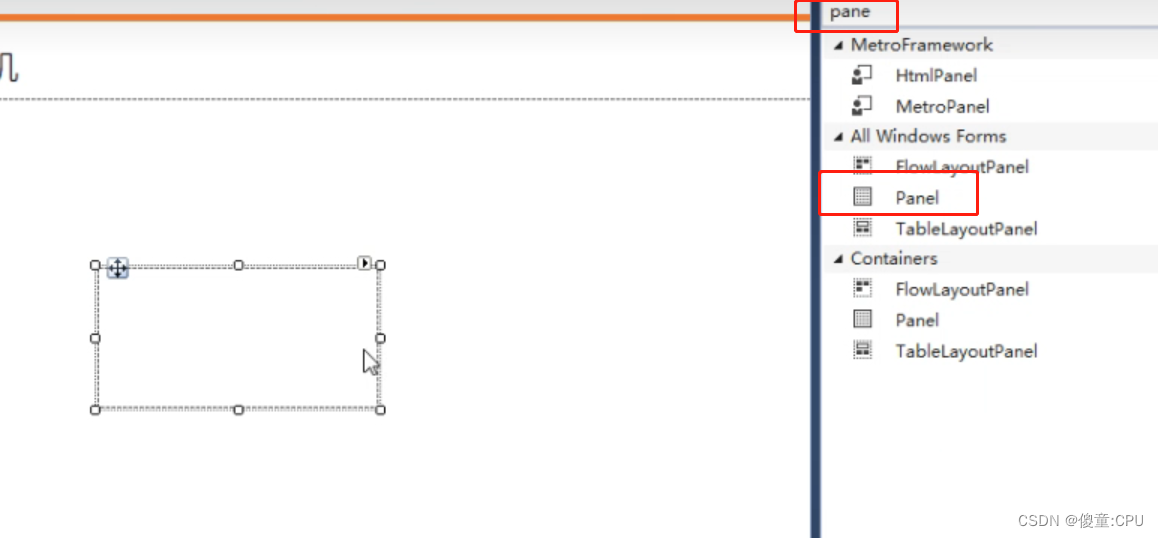
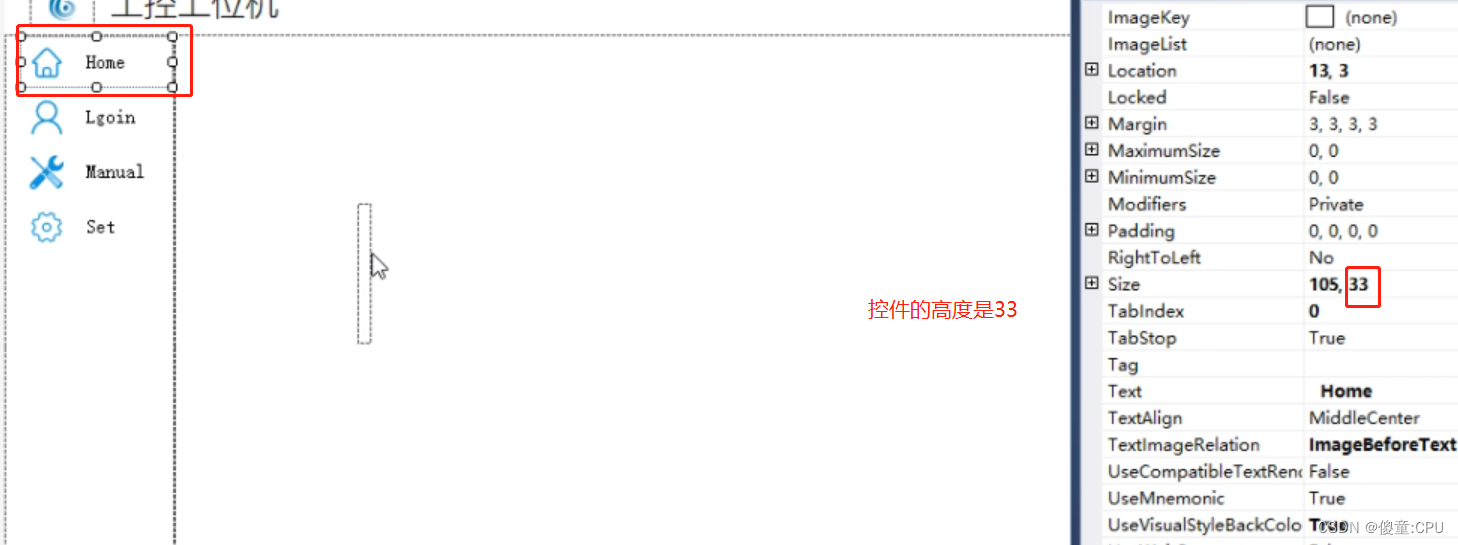
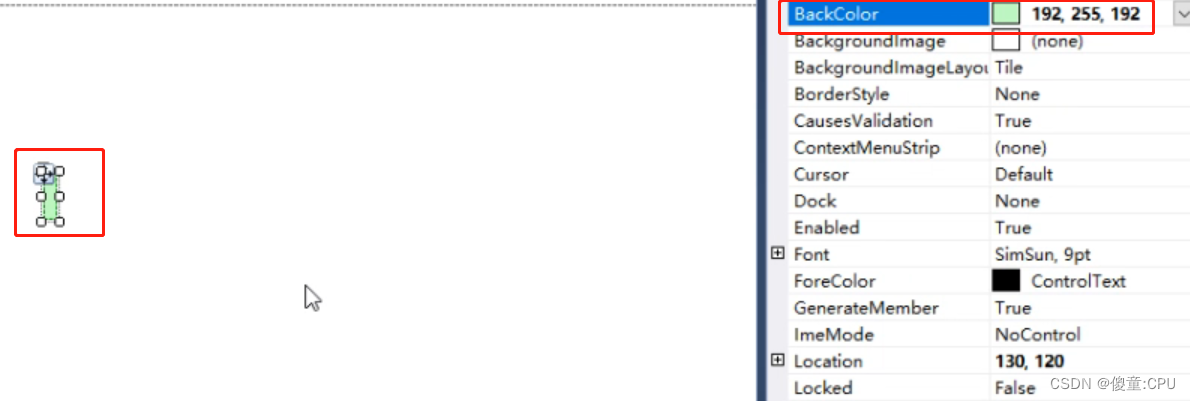
先点击一下Panel,在点击一下屏幕。 先选中Panel,在进行属性设置。 图标连接
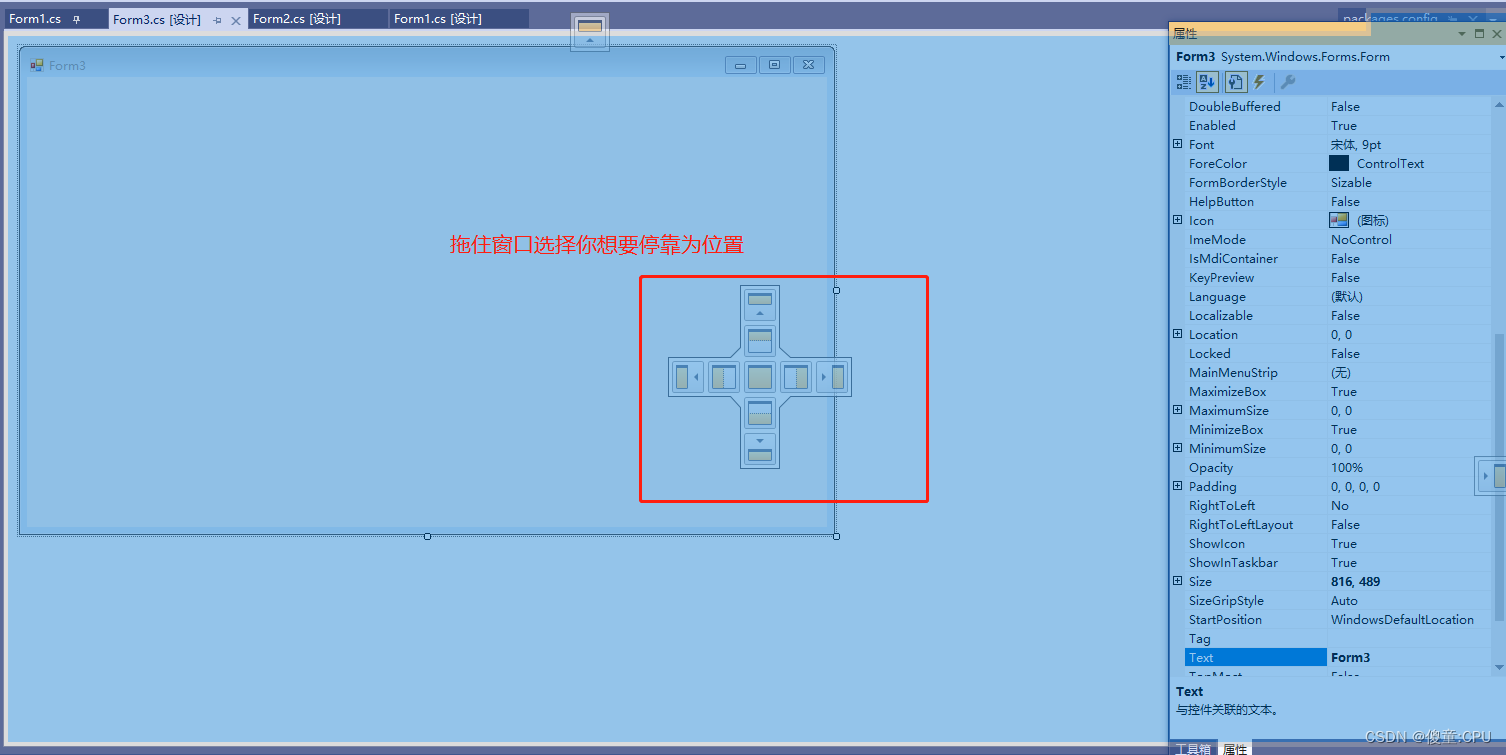
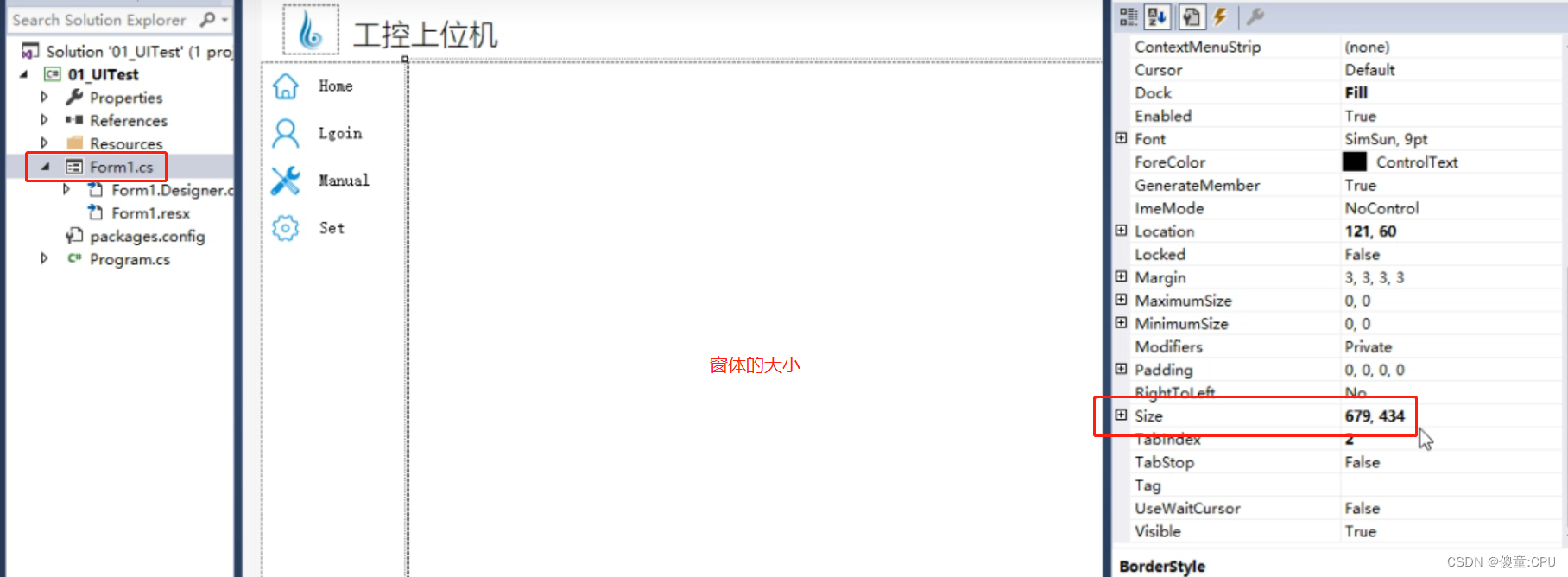
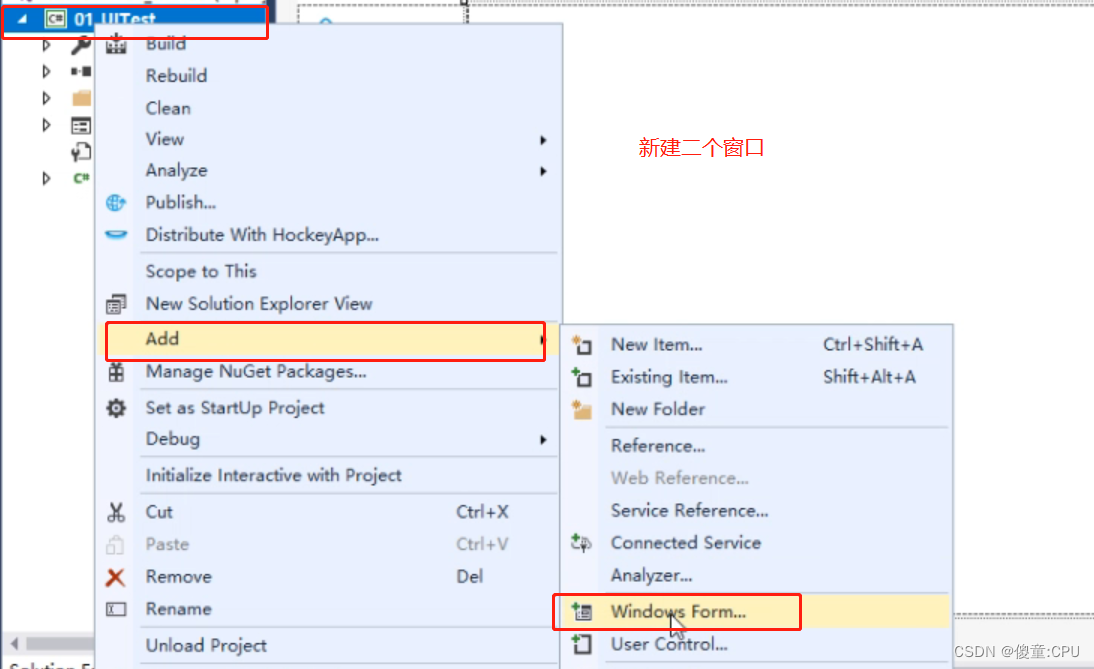
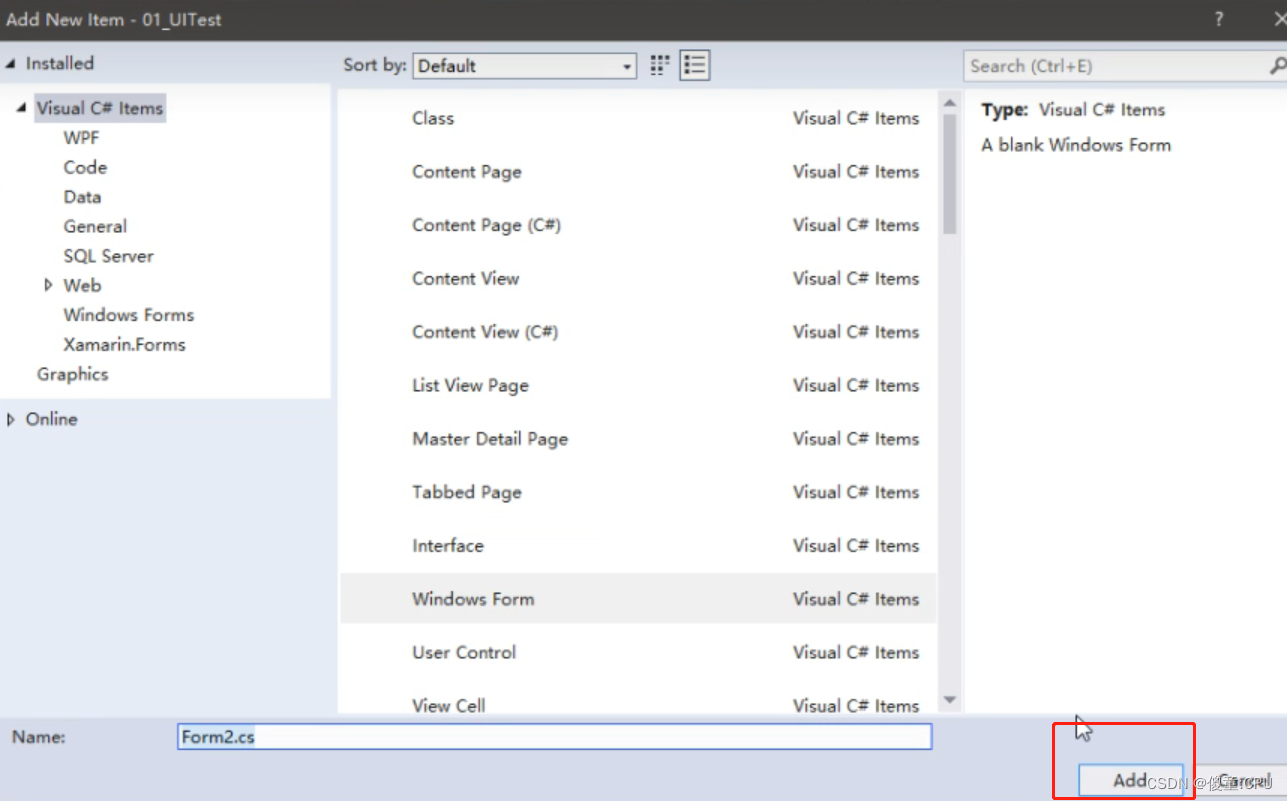
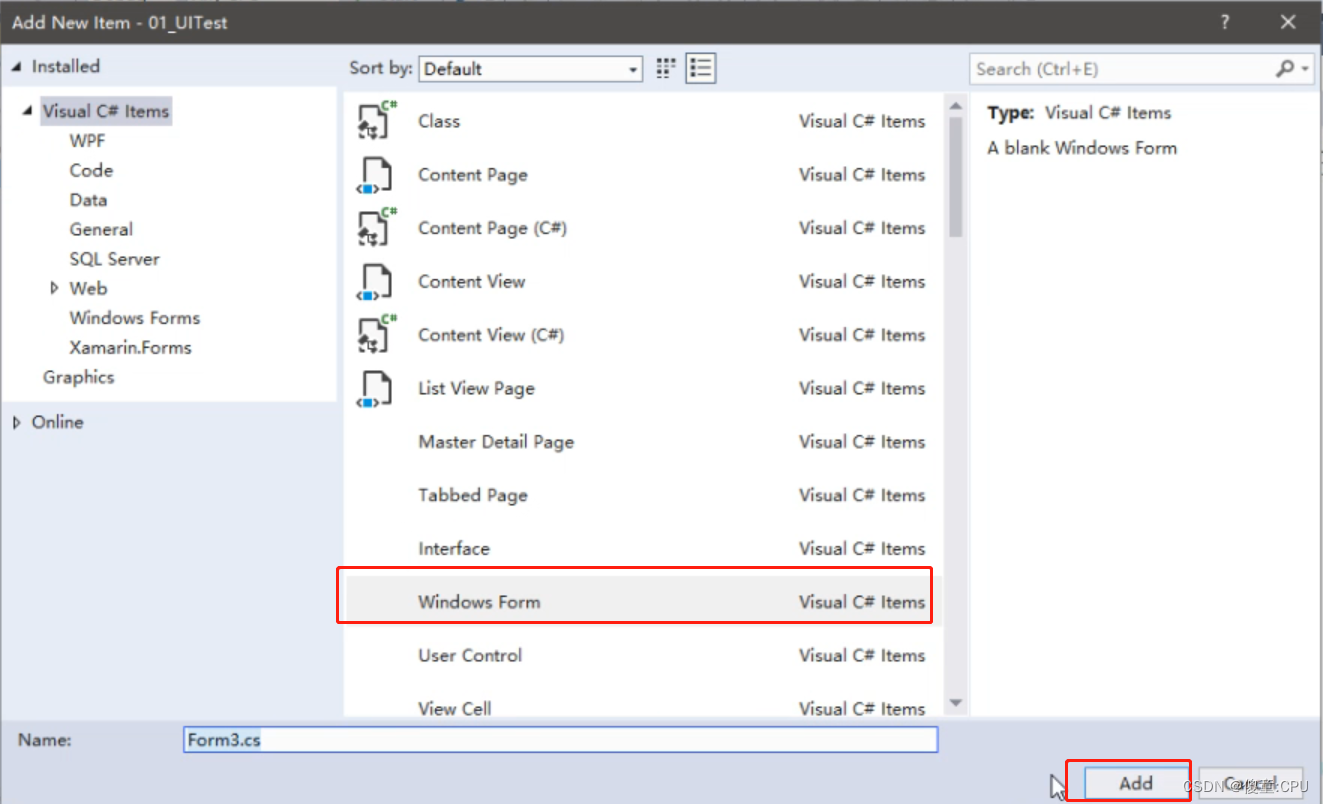
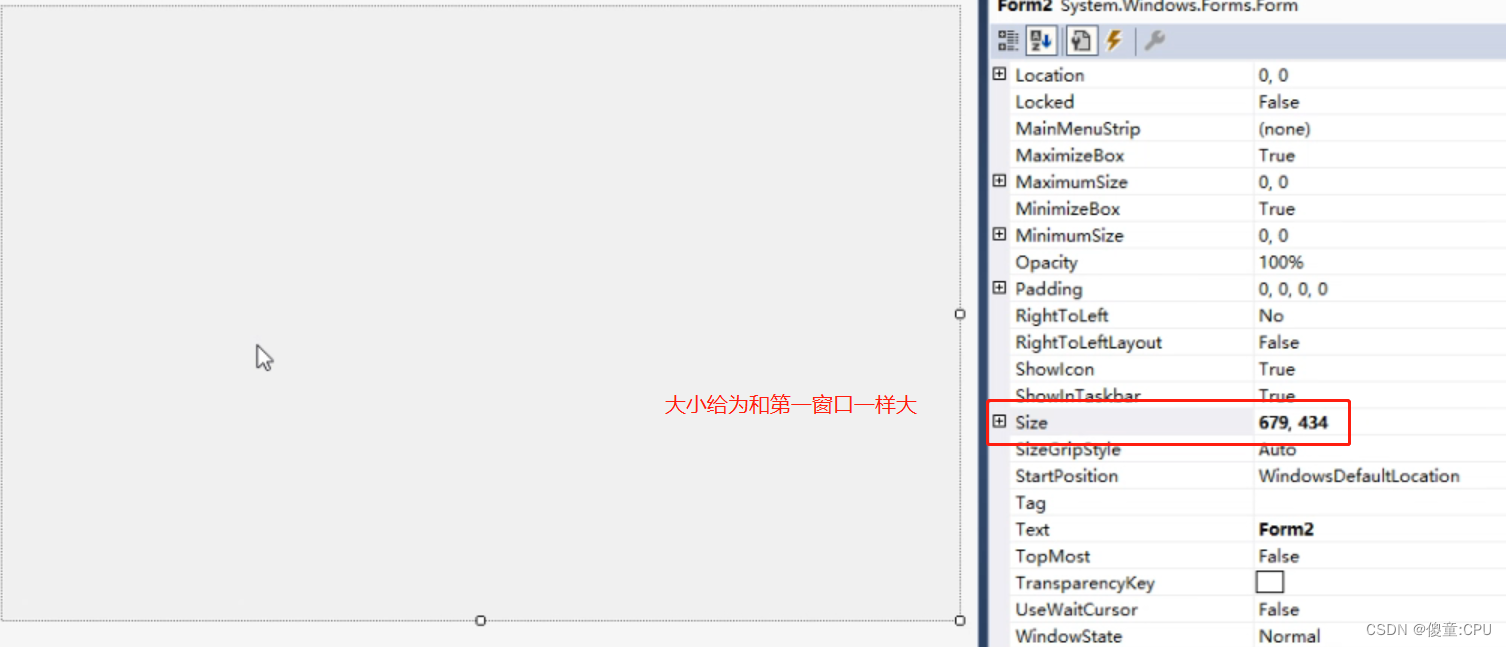
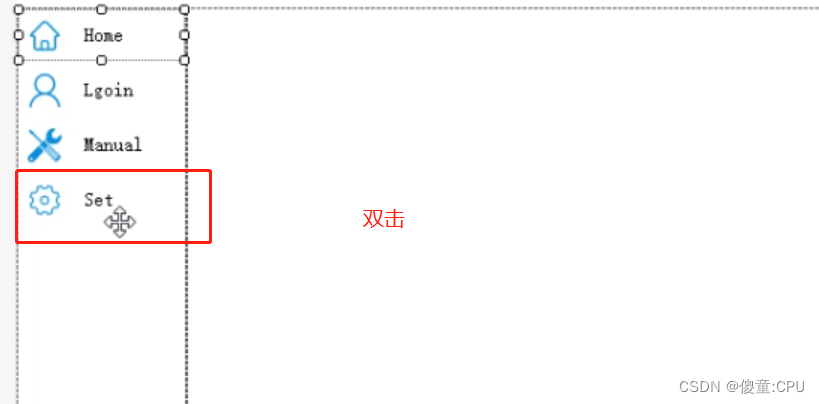
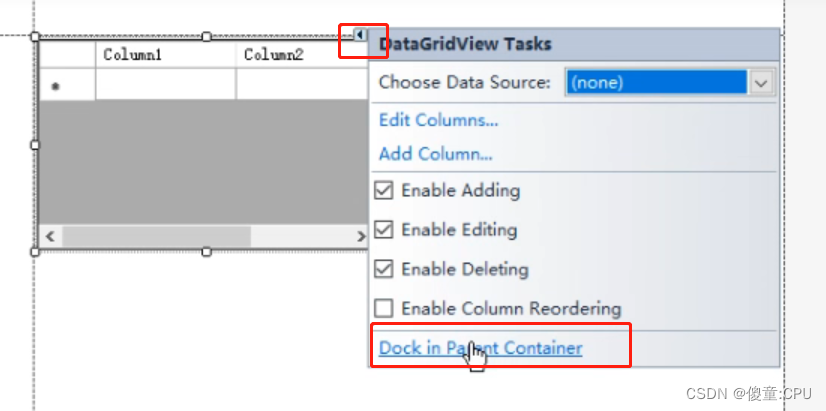
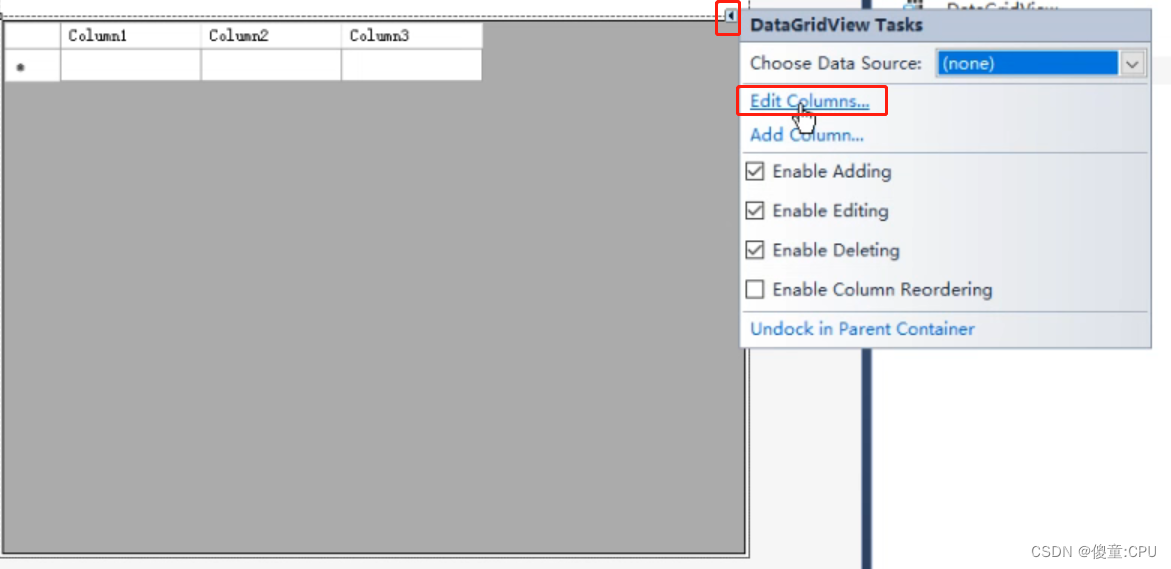
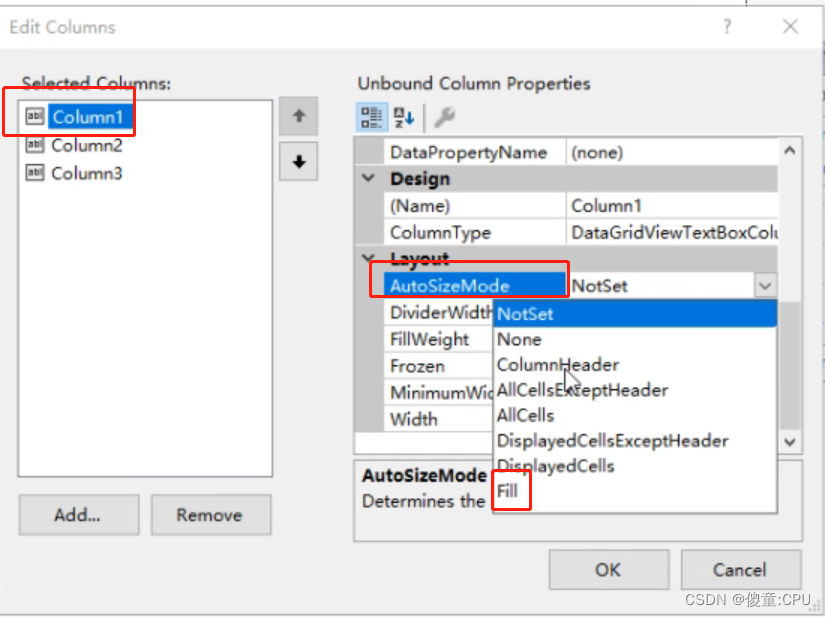
嵌入式窗体
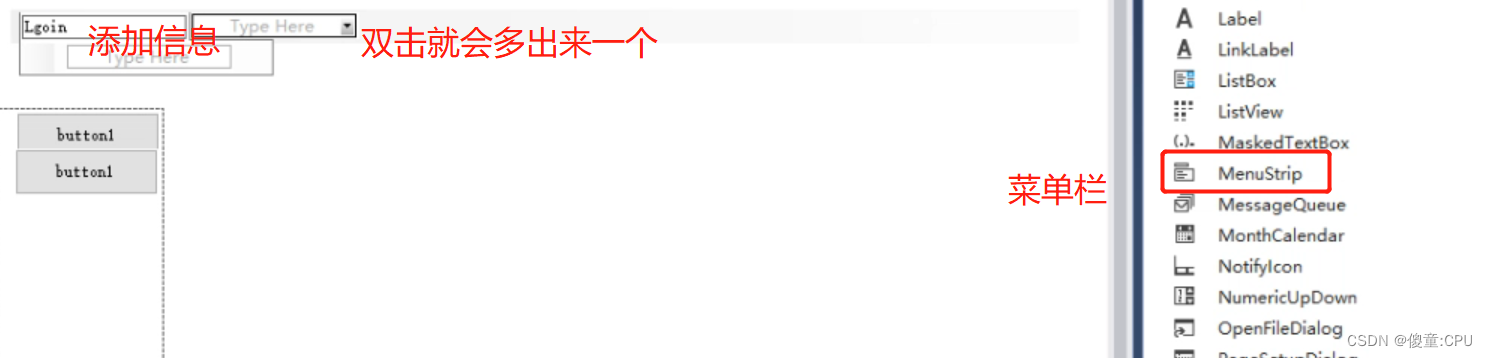
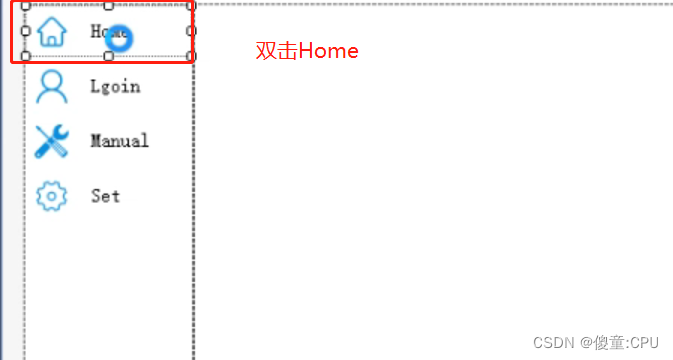
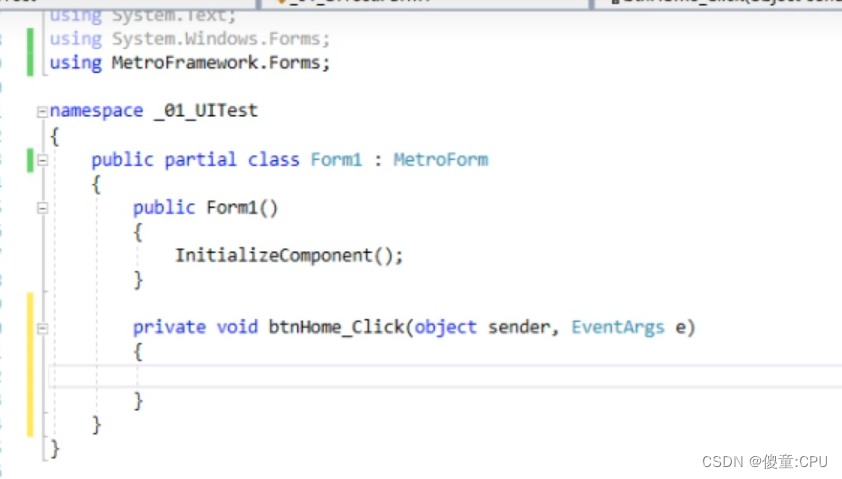
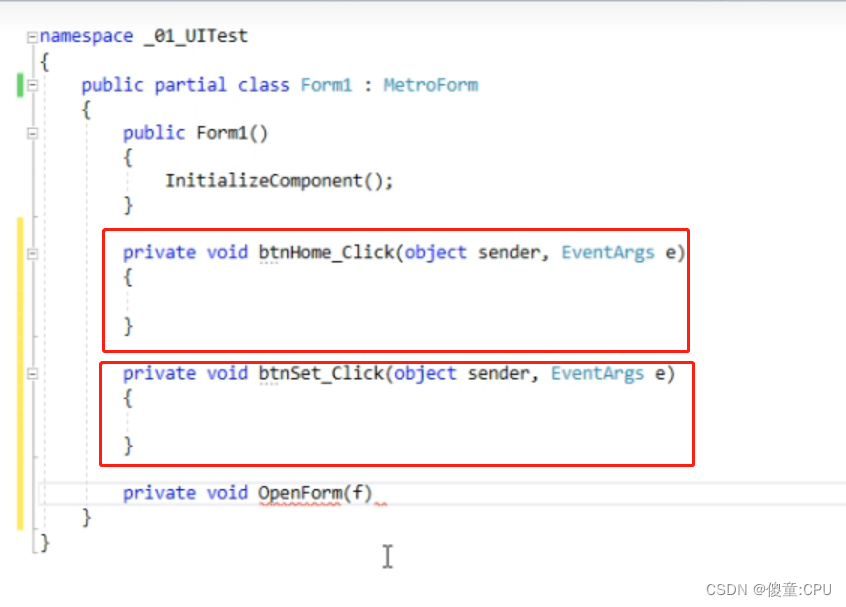
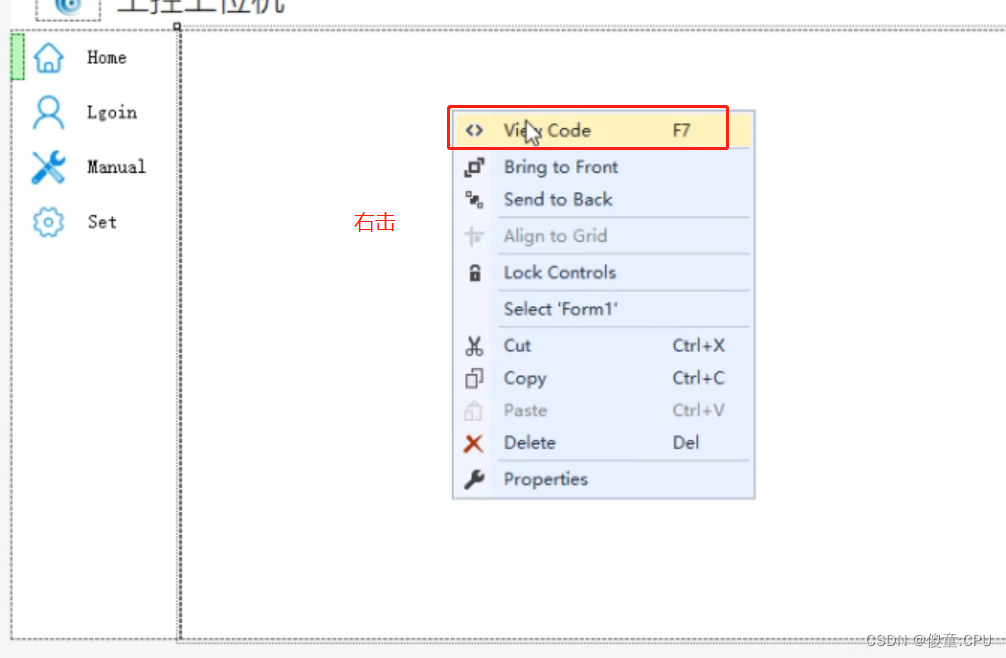
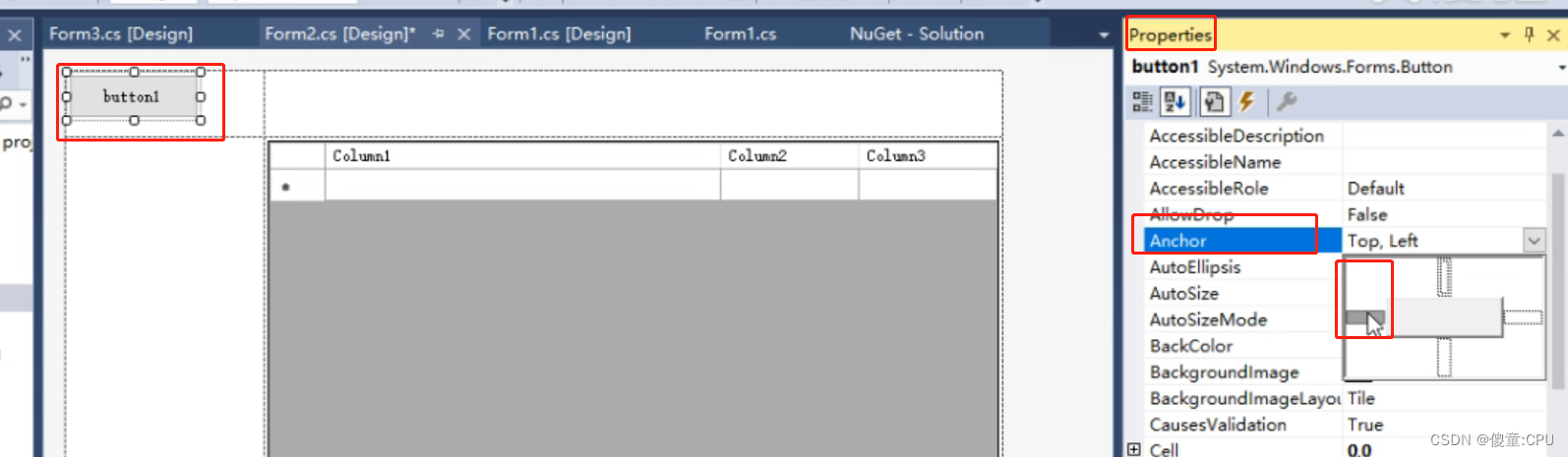
设置按键的事件
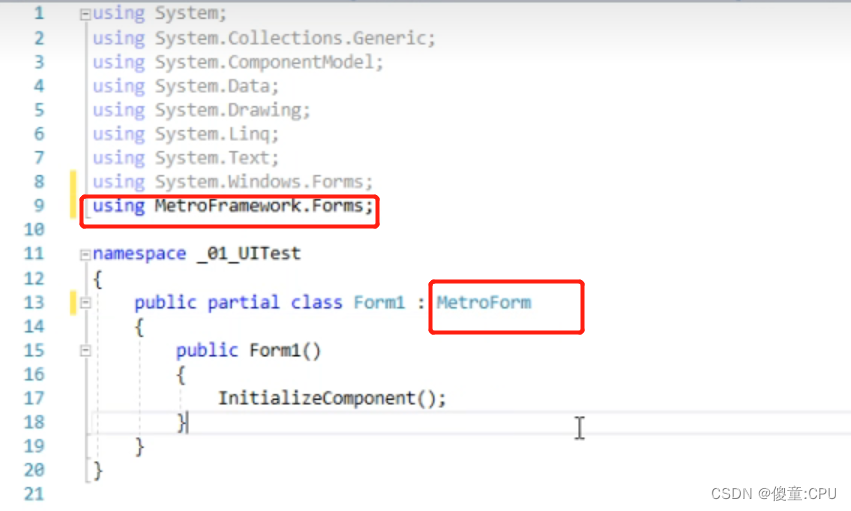
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; using MetroFramework.Forms; namespace _01_UITest { public partial class Form1 : MetroForm { public Form1() { InitializeComponent(); } //第一个按钮的点击事件 private void Form1_Load(object sender, EventArgs e) { } //第二个按钮的点击事件 private void btnHome_Click(object sender, EventArgs e) { OpenForm(new Form2()); } private void btnSet_Click(object sender, EventArgs e) { OpenForm(new Form3()); } //定义一个开窗的方法 private void OpenForm(Form frm)//传入一个参数,参数为窗口的名字 { frm.TopLevel = false; frm.TopMost = false; this.panelMain.Controls.Clear(); this.panelMain.Controls.Add(frm); frm.Show(); } } }
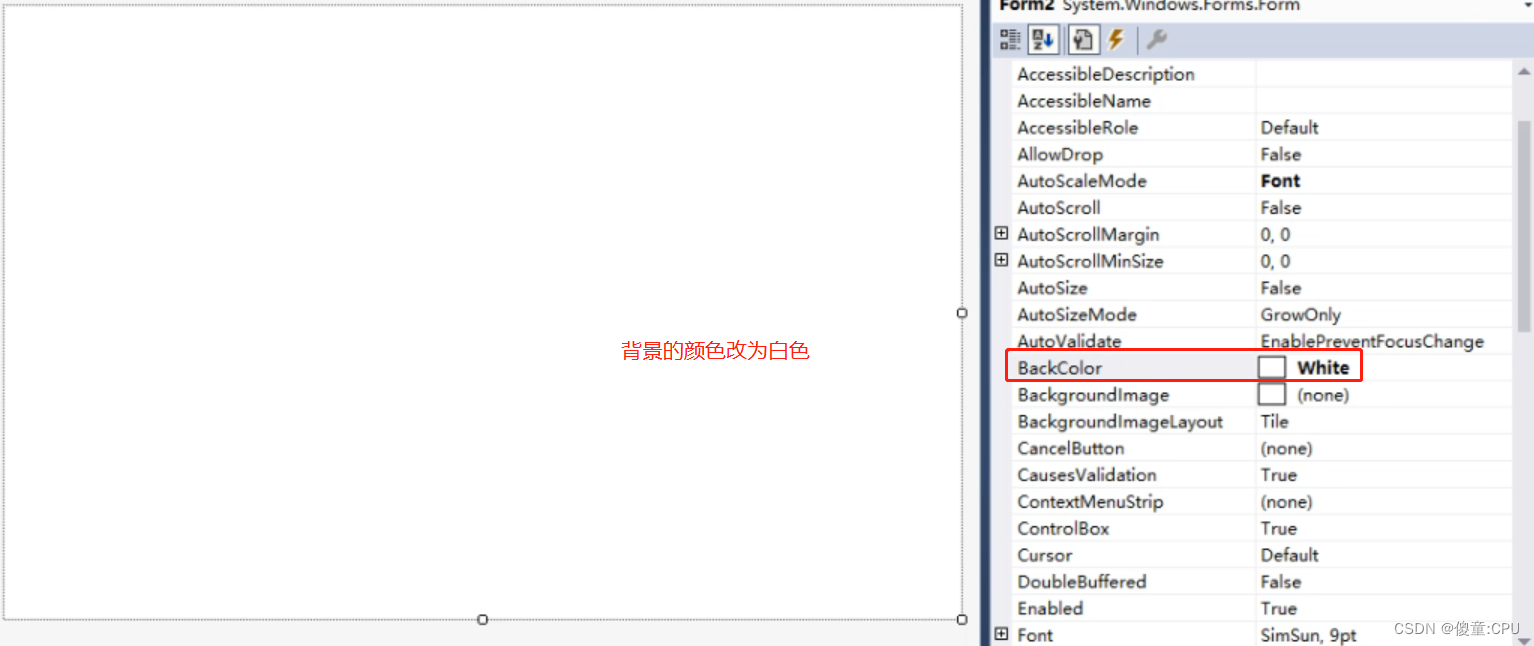
修改一下背景颜色。
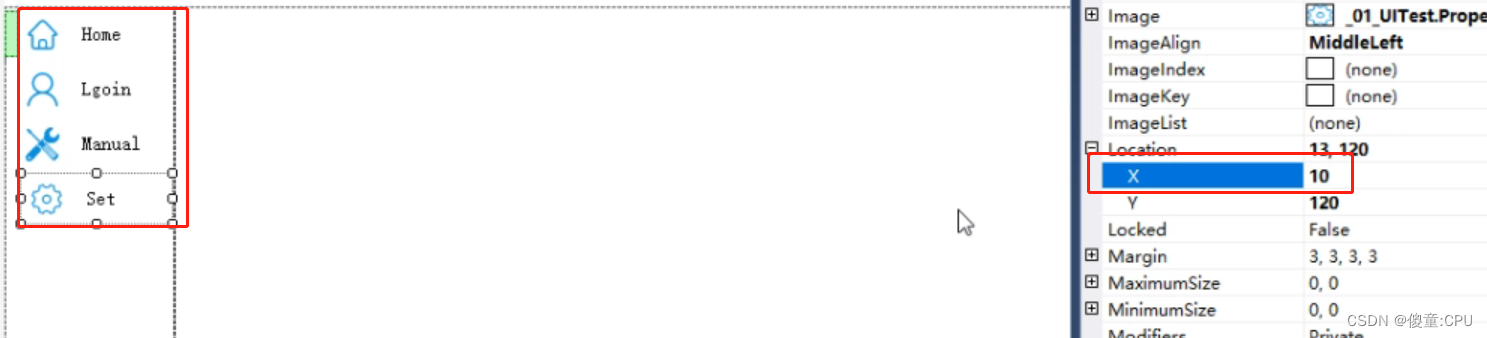
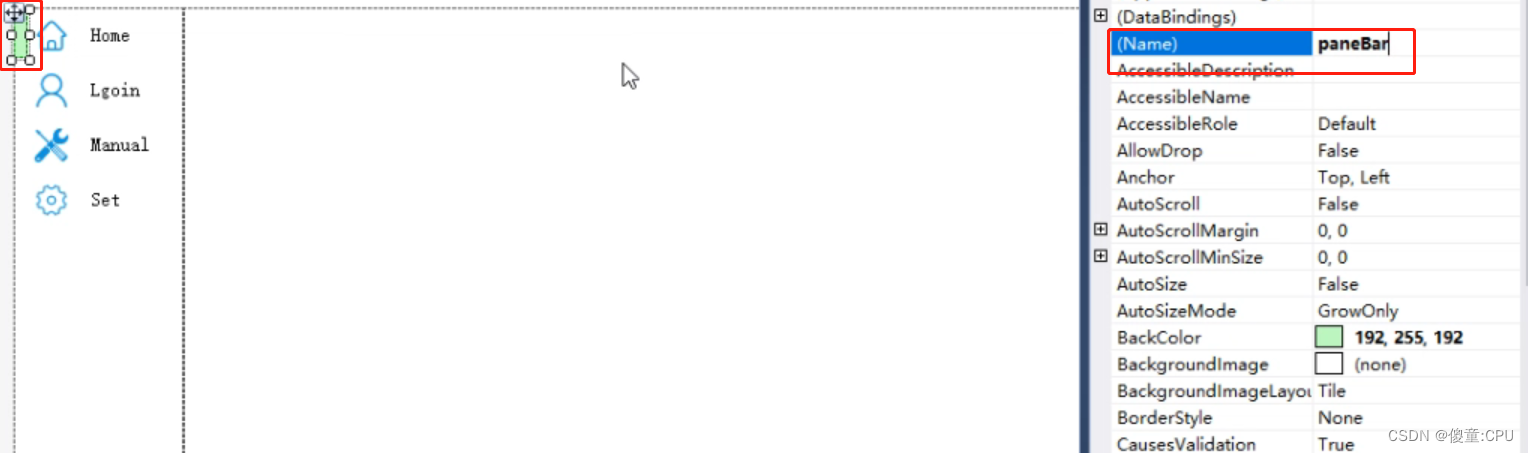
using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Threading.Tasks; using System.Windows.Forms; using MetroFramework.Forms; namespace _01_UITest { public partial class Form1 : MetroForm { public Form1() { InitializeComponent(); } //第一个按钮的点击事件 private void Form1_Load(object sender, EventArgs e) { } //第二个按钮的点击事件 private void btnHome_Click(object sender, EventArgs e) { OpenForm(new Form2()); ShowBar(sender as Button); } private void btnSet_Click(object sender, EventArgs e) { OpenForm(new Form3()); ShowBar(sender as Button); } //定义一个开窗的方法 private void OpenForm(Form frm)//传入一个参数,参数为窗口的名字 { frm.TopLevel = false; frm.TopMost = false; this.panelMain.Controls.Clear(); this.panelMain.Controls.Add(frm); frm.Show(); } //让蓝色的框框下移 private void ShowBar(Button btn) { this.panelBar.Location = new Point(btn.Location.X - 10,btn.Location.Y );//12表示宽度 } } }
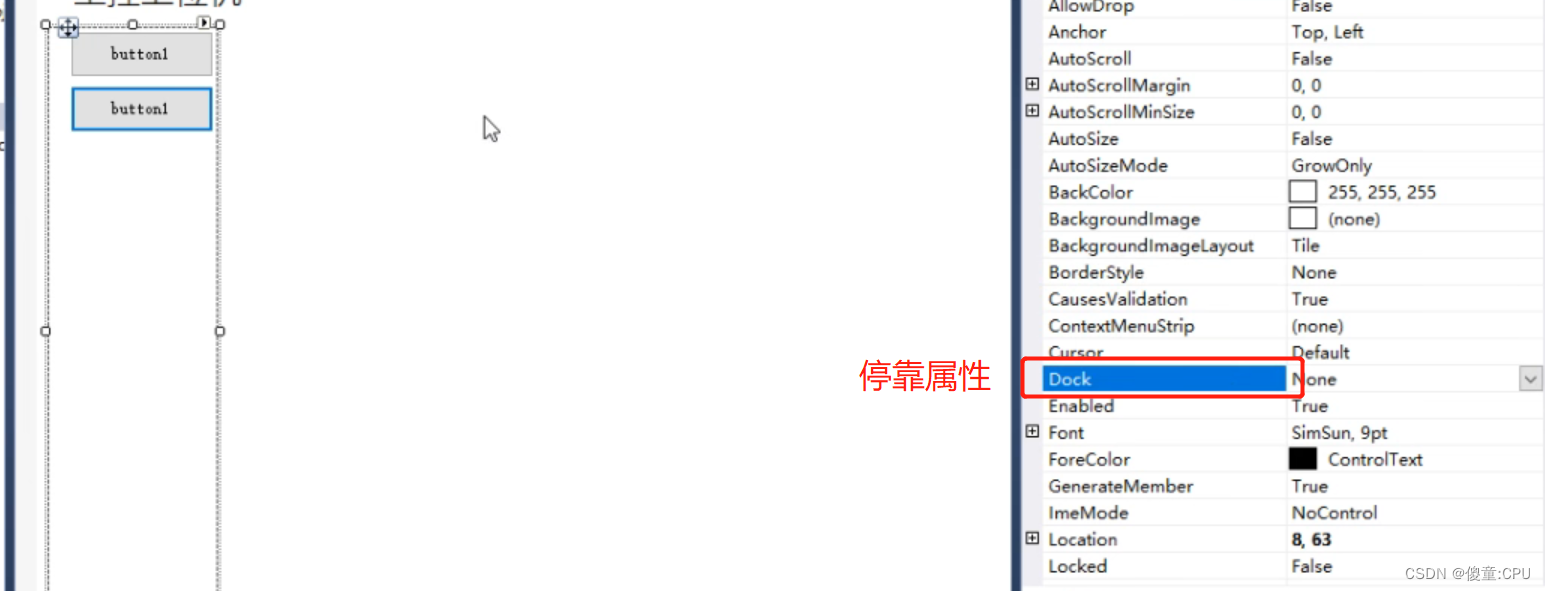
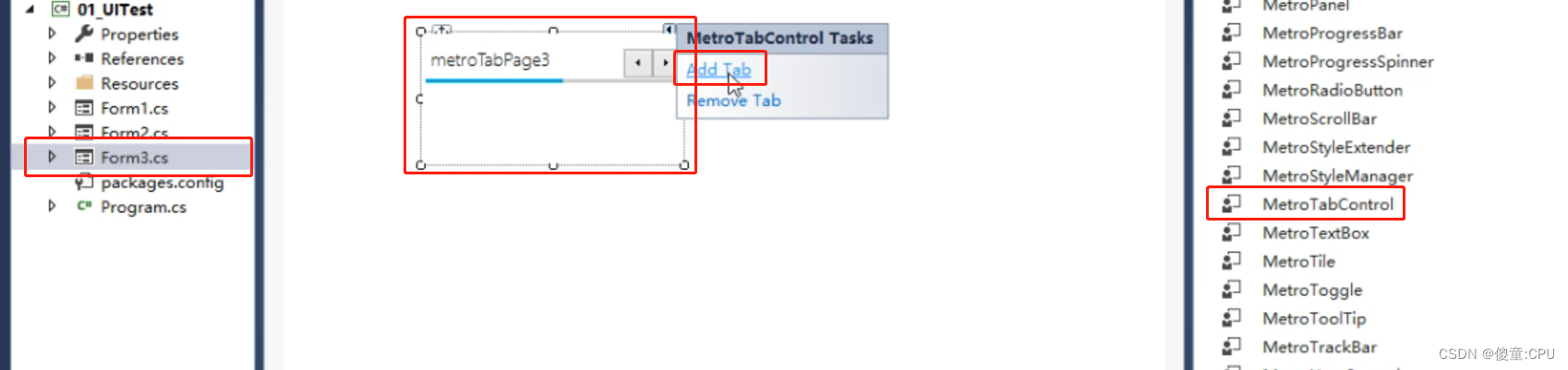
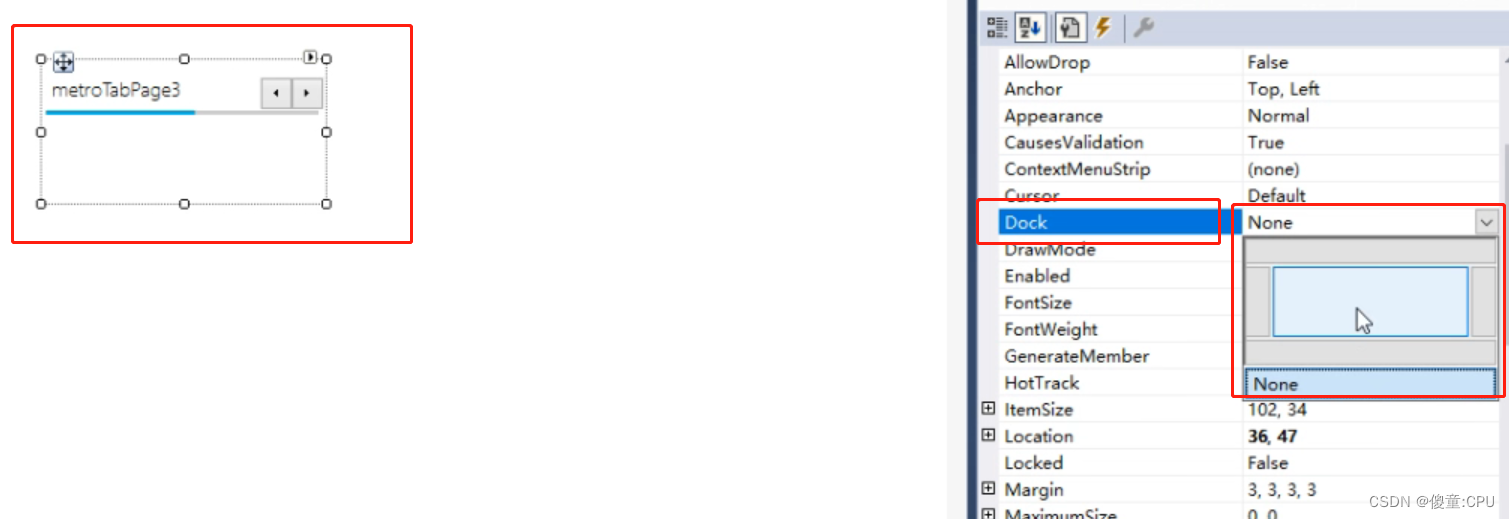
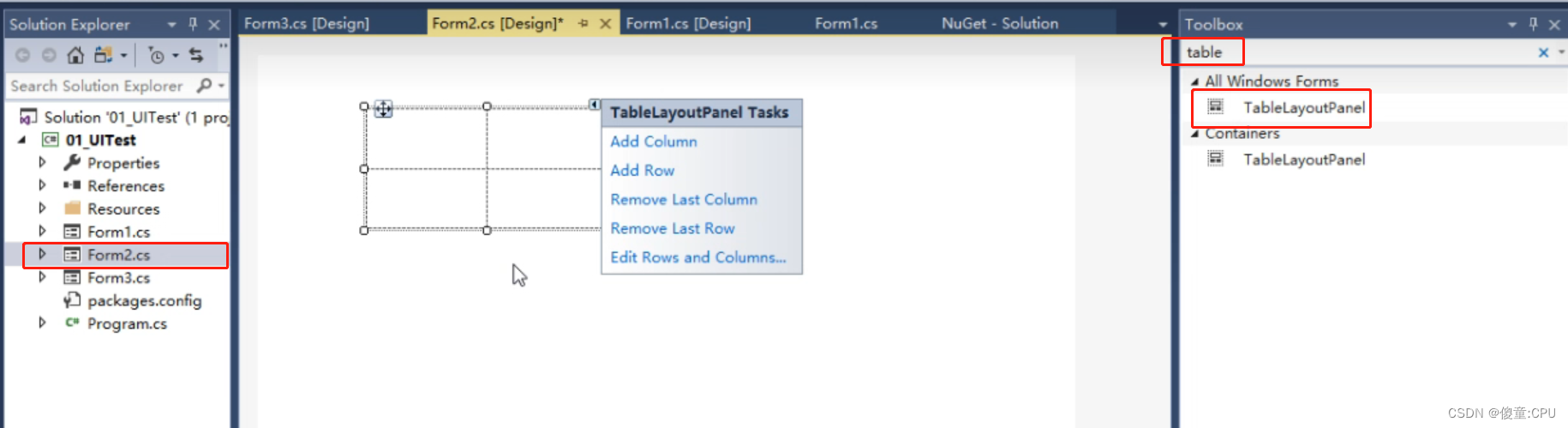
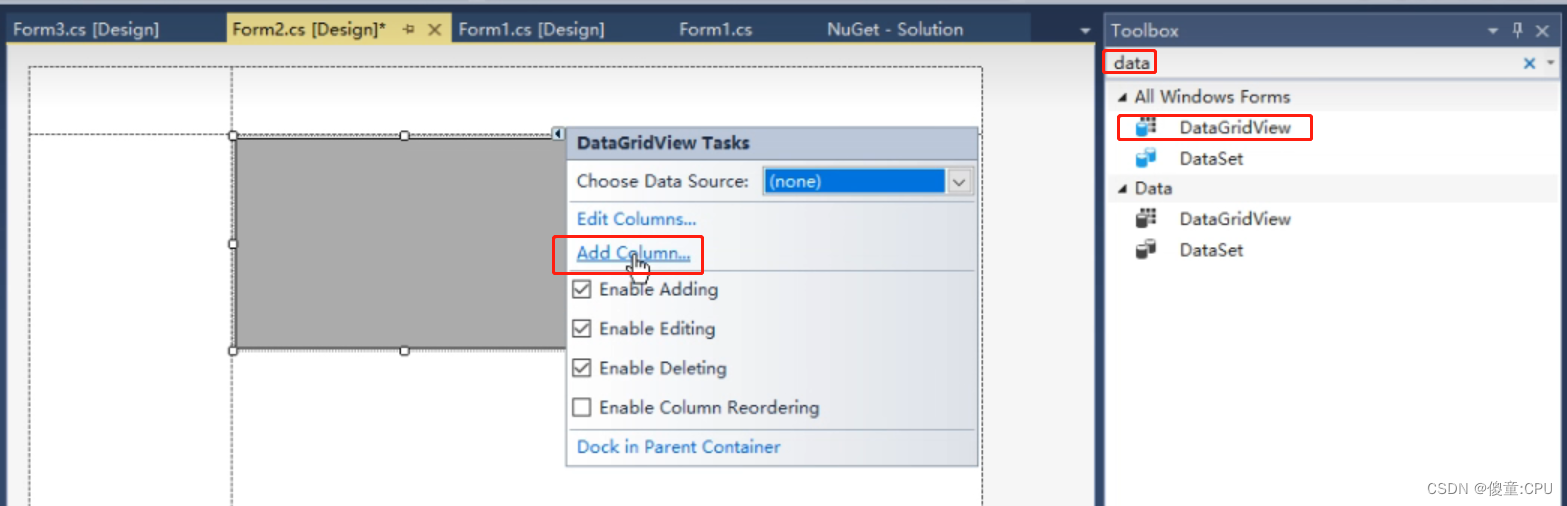
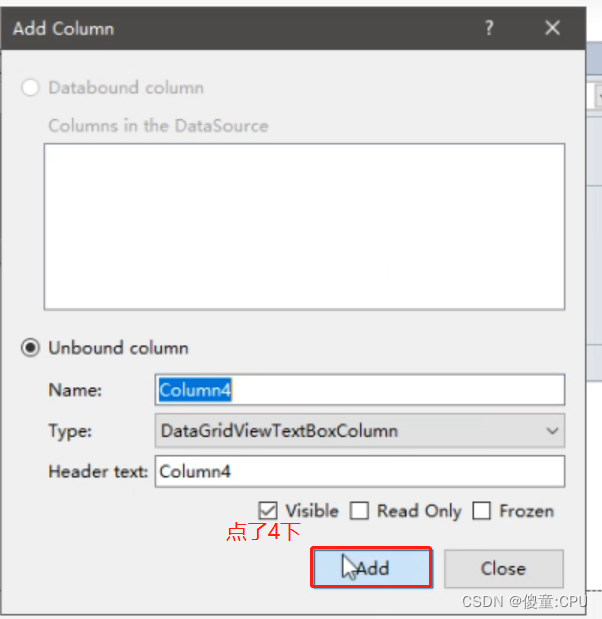
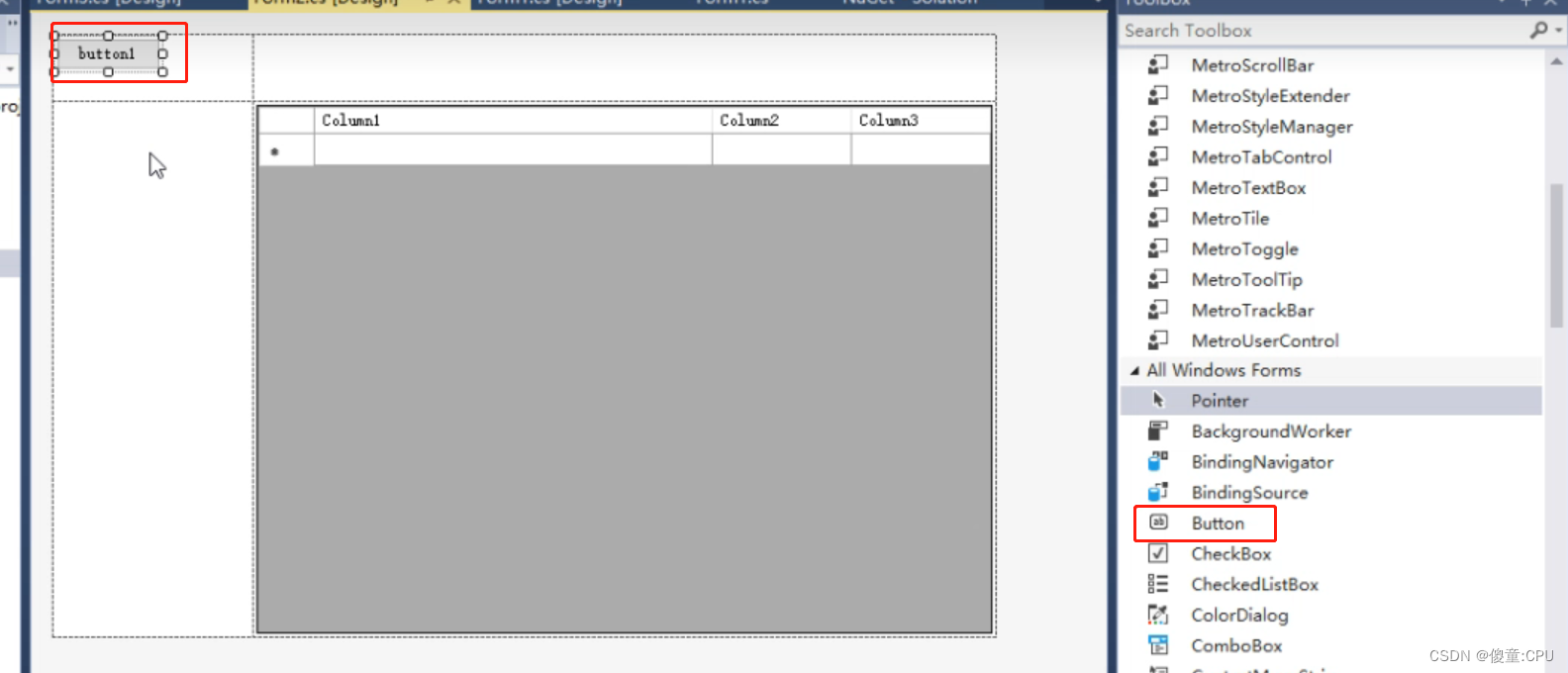
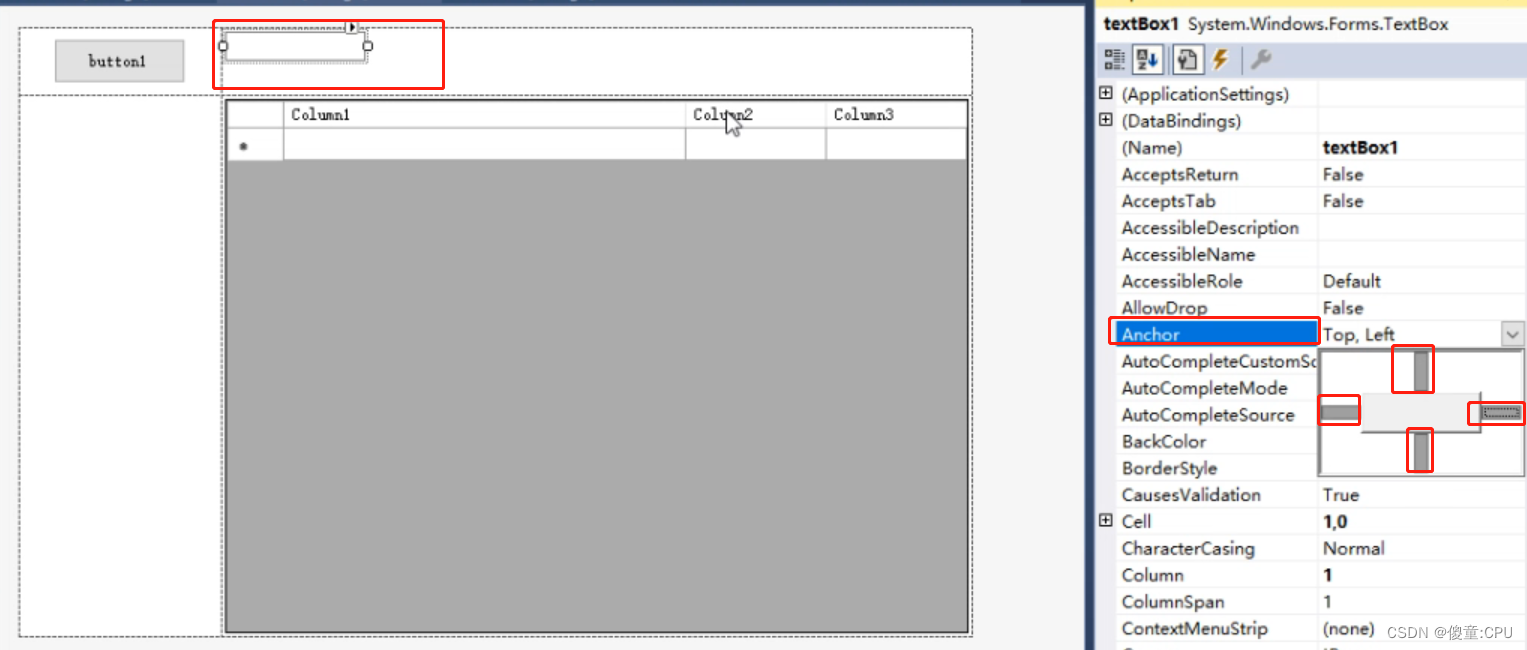
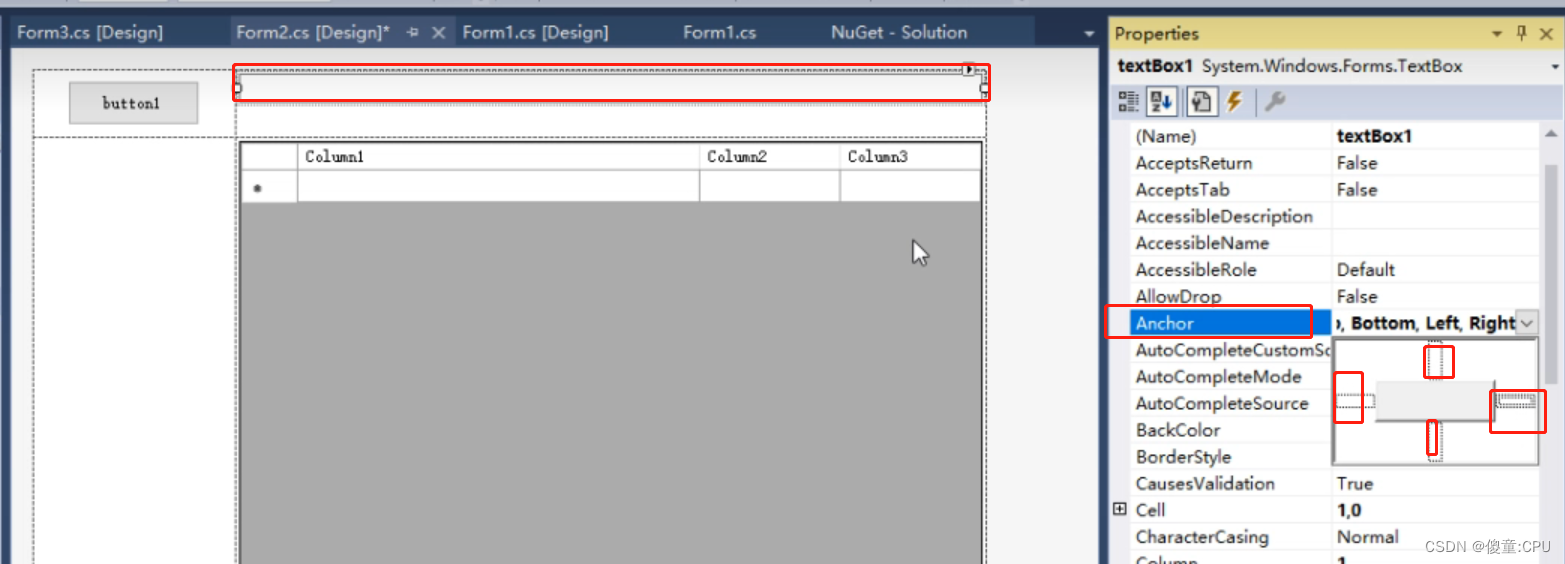
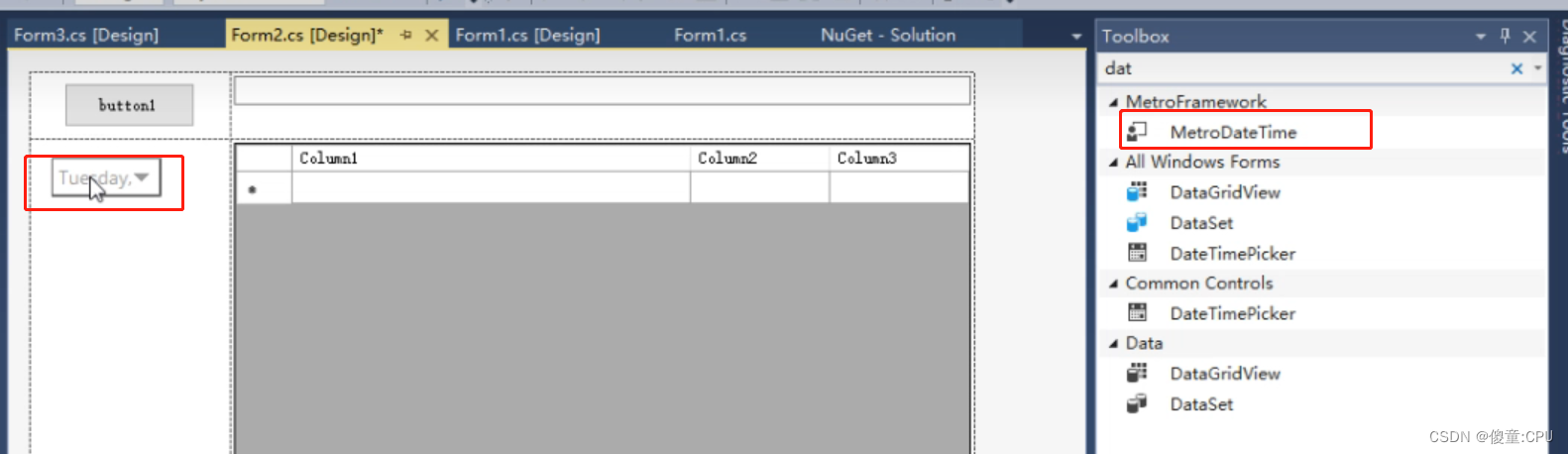
另一种布局