Ubuntu18.04下基于ROS和PX4的无人机仿真平台的基础配置搭建
参考资料: https://www.yuque.com/xtdrone/manual_cn/basic_config_1.11 https://blog.csdn.net/qq_42585108/article/details/106781596 https://blog.csdn.net/qq_44830040/article/details/106049992 https://blog.csdn.net/abc869788668/article/details/78323395?locationNum=8&fps=1 如果可以请仔细查看XTDrone的使用文档,会有很多的收获,再顺便在gitee和github上给XTDrone各点一个star吧。
无人机仿真平台的搭建用了肖昆老师的XTDrone项目,十分感谢,相关网页:https://gitee.com/robin_shaun/XTDrone,我这里只是对仿真无人机平台的搭建做了个总结。 本文只是在这几篇文章的基础上进行了些总结和个人安装时的经验心得,中间可能引用较多,若是构成了侵权请联系我删除,目前XTDrone的使用文档已经越来越详细和具体,希望大家多去看看,本文只算是一些补充,或者说是我自己的心得和备忘
系统Ubuntu18.04,本人从一个刚装好的纯净的Ubuntu开始安装,一步步走下来,综合了一些网络上的搭建方法以及在其中遇到的问题,把这些记录下来,方便大家和自己参考。若有错误不对欢迎指正。
我在b站发了流程演示的视频BV1Ku41197V5,若是有不清楚的可以去看一下。视频里只是演示了流程,只能看看,若是有其他问题,还请自己再尝试,毕竟电脑与电脑之间不能一概而论。
最近我突然意识到一个问题,朋友们,下面的指令不要一直在一个终端里运行啊,要不然文件的路径不对了,这大概率是失败的。
一、依赖安装
1
sudo apt install ninja-build exiftool ninja-build protobuf-compiler libeigen3-dev genromfs xmlstarlet libgstreamer1.0-dev libgstreamer-plugins-base1.0-dev python-pip python3-pip gawk
2
pip2 install pandas jinja2 pyserial cerberus pyulog==0.7.0 numpy toml pyquaternion empy pyyaml
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse
这第二个下载可能比较慢,我这里pip从清华源下载(在代码后面加上 -i https://pypi.tuna.tsinghua.edu.cn/simple),要是失败了多试几次
如果出现如下报错情况,可先更新 setuptools 和 pip
Collecting pandas
Using cached https://files.pythonhosted.org/packages/64/f1/8fdbd74edfc31625d597717be8c155c6226fc72a7c954c52583ab81a8614/pandas-1.1.2.tar.gz
Complete output from command python setup.py egg_info:
Traceback (most recent call last):
File "<string>", line 1, in <module>
File "/tmp/pip-build-qtvsjq8t/pandas/setup.py", line 349
f"{extension}-source file '{sourcefile}' not found.\n"
^
SyntaxError: invalid syntax
----------------------------------------
Command "python setup.py egg_info" failed with error code 1 in /tmp/pip-build-qtvsjq8t/pandas/
pip install --upgrade setuptools
python -m pip install --upgrade pip
二、ROS安装
安装见ROS官方网站:http://wiki.ros.org/Installation/Ubuntu
或者参考教程:https://blog.csdn.net/qq_44830040/article/details/106049992(这个教程是用的国内源安装,虽然可以使用ros,但是可能在和其他的一起使用时出现问题例如darknet_ros,虽然国内源下载会快很多,但还是建议从官网下载)
注意:Ubuntu18.04可以直接全部安装(即指令 sudo apt-get install ros-melodic-desktop 即对于ROS Melodic,选择desktop-full的方式安装,这将同时安装Gazebo9和感知相关库)但是我个人建议18.04的也不进行全部安装,直接安装的gazebo9.0存在缺陷可能在后面出现问题,建议也是选择安装desktop,然后在下面的步骤中安装gazebo9.13或者以上
Ubuntu16.04(ROS Kinetic)选择destop否则安装gazebo7无法进行后续仿真
这里把安装ROS(以melodic为例)也列举出来:
1.配置Ubuntu存储库
在软件与更新中点击 源代码

2.设置sources.list
以下分别是清华镜像、中科大镜像和官方默认选其中一个即可,但是个人推荐国内镜像,下载会快很多
清华镜像:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
中科大镜像:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
官方默认:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置key
sudo apt install curl
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
要是显示报错的话可以用下面的方法
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
4.安装
sudo apt update
sudo apt install ros-melodic-desktop
正常安装ROS的话可以sudo apt install ros-melodic-desktop-full,我这里是sudo apt install ros-melodic-desktop原因前面已经说了
5.设定环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
6.构建软件包的依赖关系
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
sudo apt install python-rosdep
sudo rosdep init
如果出现错误:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
执行如下命令:
cd /etc
sudo gedit hosts
末尾添加:151.101.84.133 raw.githubusercontent.com然后保存文件退出即可。
如果出现错误:
ERROR: default sources list file already exists:
/etc/ros/rosdep/sources.list.d/20-default.list
Please delete if you wish to re-initialize
解决办法,执行如下命令:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
然后再次执行sudo rosdep init
7.执行rosdep update更新
rosdep update
如果出现如下错误:
ERROR: error loading sources list:
(‘The read operation timed out’,)
大概是网络的问题,反复执行rosdep update命令即可,用手机热点可能会好一点
如果还是不能解决建议参考链接
最近发现这个方法也不是能一定解决,如果可以还是科学上网比较好些
安装以后启动ROS:
roscore
有下列输出说明安装成功:
... logging to /home/robin/.ros/log/a5118af0-5474-11ea-8b86-e454e828c524/r
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://robin-G3-3590:34223/
ros_comm version 1.12.14
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.14
NODES
auto-starting new master
process[master]: started with pid [30244]
ROS_MASTER_URI=http://robin-G3-3590:11311/
setting /run_id to a5118af0-5474-11ea-8b86-e454e828c524
process[rosout-1]: started with pid [30261]
started core service [/rosout]
新建工作空间,推荐使用catkin-tools管理工作空间,之后除去PX4仿真环境启动外,其余ROS相关工程在此工作空间下管理。
mkdir -p ~/catkin_ws/src
mkdir -p ~/catkin_ws/scripts
cd catkin_ws/src
catkin_init_workspace
cd ..
catkin_make
三、Gazebo安装
无论是ros Kinetic还是Melodic,自带的Gazebo都存在缺陷,若是安装ros时已经安装了gazebo建议卸载并重新安装。建议gazebo版本在9.13以上
Gazebo安装见官网:
http://gazebosim.org/tutorials?tut=install_ubuntu&cat=install
注意几点:
1.选用Alternative installation: step-by-step的安装方式
2.安装Gazebo9.13或者以上
这里为了方便把gazebo的安装也列出来
0.卸载之前的Gazebo(如果安装的话)
sudo apt-get remove gazebo*
sudo apt-get remove libgazebo*
sudo apt-get remove ros-melodic-gazebo*
1.设置计算机以接受来自package.osrfoundation.org的软件
sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
cat /etc/apt/sources.list.d/gazebo-stable.list
2.设置密钥
wget https://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
sudo apt-get update
3.安装gazebo9.1指令:
sudo apt-get install gazebo9=9.1*
安装之后终端输入gazebo若打开Gazebo说明安装成功
4.Gazebo本身是独立于ROS的,因此还需要安装ROS的Gazebo插件
sudo apt install ros-melodic-gazebo9-*
sudo apt install ros-melodic-gazebo-*
测试
roscore
rosrun gazebo_ros gazebo
若能打开Gazebo说明Gazebo和ROS间的插件也安装成功。
输入gazebo --version也可以查看到gazebo的版本
Gazebo有很多开源的模型文件,XTDrone的作者已经上传,大家可以去自己寻找下载https://www.yuque.com/xtdrone/manual_cn/basic_config
将该附件解压缩后放在~/.gazebo中,此时在 ~/.gazebo/models/路径下可以看到很多模型。如果不做这一步,之后运行Gazebo仿真,可能会缺模型,这时会自动下载,国内的网比较慢,自动下载会下载比较久。
四、MAVROS安装
注意,mavros-extras一定别忘记装,否则视觉定位将无法完成
sudo apt install ros-kinetic-mavros ros-kinetic-mavros-extras
sudo apt install ros-melodic-mavros ros-melodic-mavros-extras
wget https://gitee.com/robin_shaun/XTDrone/raw/master/sitl_config/mavros/install_geographiclib_datasets.sh
sudo chmod a+x ./install_geographiclib_datasets.sh
sudo ./install_geographiclib_datasets.sh
最后的sudo ./install_geographiclib_datasets.sh 这步需要装一段时间,请耐心等待
五、PX4配置(1.11版本)
由于国内的github下载速度较慢,XTrone的作者们把固件和submodule同步到了gitee,如果嫌github慢,可以从gitee下载,Xtdrone的官网在这一步也直接提供了编译好的PX4固件,要是实在不行可以直接下载。
github
git clone https://github.com/PX4/PX4-Autopilot.git
mv PX4-Autopilot PX4_Firmware
cd PX4_Firmware
git checkout -b xtdrone/dev v1.11.0-beta1
git submodule update --init --recursive
make px4_sitl_default gazebo
gitee
git clone https://gitee.com/robin_shaun/PX4_Firmware
cd PX4_Firmware
git checkout -b xtdrone/dev v1.11.0-beta1
修改.gitmodules(在PX4_Firmware文件夹中ctrl+h查看隐藏文件可以找到 图左下角第一个)
打开之后修改如下:
[submodule "mavlink/include/mavlink/v2.0"]
path = mavlink/include/mavlink/v2.0
url = https://gitee.com/robin_shaun/c_library_v2.git
branch = master
[submodule "src/drivers/uavcan/libuavcan"]
path = src/drivers/uavcan/libuavcan
url = https://gitee.com/robin_shaun/uavcan.git
branch = px4
[submodule "Tools/jMAVSim"]
path = Tools/jMAVSim
url = https://gitee.com/robin_shaun/jMAVSim.git
branch = master
[submodule "Tools/sitl_gazebo"]
path = Tools/sitl_gazebo
url = https://gitee.com/robin_shaun/sitl_gazebo.git
branch = master
[submodule "src/lib/matrix"]
path = src/lib/matrix
url = https://gitee.com/robin_shaun/Matrix.git
branch = master
[submodule "src/lib/ecl"]
path = src/lib/ecl
url = https://gitee.com/robin_shaun/ecl.git
branch = master
[submodule "boards/atlflight/cmake_hexagon"]
path = boards/atlflight/cmake_hexagon
url = https://gitee.com/robin_shaun/cmake_hexagon.git
branch = px4
[submodule "src/drivers/gps/devices"]
path = src/drivers/gps/devices
url = https://gitee.com/robin_shaun/GpsDrivers.git
branch = master
[submodule "src/modules/micrortps_bridge/micro-CDR"]
path = src/modules/micrortps_bridge/micro-CDR
url = https://gitee.com/robin_shaun/micro-CDR.git
branch = px4
[submodule "platforms/nuttx/NuttX/nuttx"]
path = platforms/nuttx/NuttX/nuttx
url = https://gitee.com/robin_shaun/NuttX.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/nuttx/NuttX/apps"]
path = platforms/nuttx/NuttX/apps
url = https://gitee.com/robin_shaun/NuttX-apps.git
branch = px4_firmware_nuttx-9.1.0+
[submodule "platforms/qurt/dspal"]
path = platforms/qurt/dspal
url = https://gitee.com/robin_shaun/dspal.git
[submodule "Tools/flightgear_bridge"]
path = Tools/flightgear_bridge
url = https://gitee.com/robin_shaun/PX4-FlightGear-Bridge.git
branch = master
[submodule "Tools/jsbsim_bridge"]
path = Tools/jsbsim_bridge
url = https://gitee.com/robin_shaun/px4-jsbsim-bridge.git
[submodule "src/examples/gyro_fft/CMSIS_5"]
path = src/examples/gyro_fft/CMSIS_5
url = https://gitee.com/mirrors/CMSIS_5
执行子模块更新指令
git submodule update --init
更改子模块下的submodule:
1、
cd ~/PX4_Firmware/src/drivers/uavcan/libuavcan
修改.gitmodules:(要先到PX4_Firmware/src/drivers/uavcan/libuavcan这个文件夹中找到.gitmodules这个文件,下面也是同样)
[submodule "dsdl"]
path = dsdl
url = https://gitee.com/robin_shaun/dsdl
branch = legacy-v0
[submodule "libuavcan/dsdl_compiler/pyuavcan"]
path = libuavcan/dsdl_compiler/pyuavcan
url = https://gitee.com/robin_shaun/pyuavcan
[submodule "libuavcan_drivers/kinetis"]
path = libuavcan_drivers/kinetis
url = https://gitee.com/robin_shaun/libuavcan_kinetis.git
git submodule update --init
2、
cd ~/PX4_Firmware/src/drivers/uavcan/libuavcan/libuavcan/dsdl_compiler/pyuavcan
修改.gitmodules:
[submodule "dsdl"]
path = dsdl
url = https://gitee.com/robin_shaun/dsdl
3、
cd ~/PX4_Firmware/Tools/jMAVSim
修改.gitmodules:
[submodule "jMAVlib"]
path = jMAVlib
url = https://gitee.com/robin_shaun/jMAVlib
branch = master
git submodule update --init
4、
cd ~/PX4_Firmware/Tools/sitl_gazebo
修改.gitmodules:
[submodule "external/OpticalFlow"]
path = external/OpticalFlow
url = https://gitee.com/robin_shaun/OpticalFlow
git submodule update --init
5、
cd ~/PX4_Firmware/platforms/qurt/dspal
修改.gitmodules:
[submodule "cmake_hexagon"]
path = cmake_hexagon
url = https://gitee.com/robin_shaun/cmake_hexagon
git submodule update --init
6、
cd ~/PX4_Firmware/Tools/sitl_gazebo/external/OpticalFlow
修改.gitmodules:
[submodule "external/klt_feature_tracker"]
path = external/klt_feature_tracker
url = https://gitee.com/robin_shaun/klt_feature_tracker
git submodule update --init
如果编译报错提示PX4_Firmware/Tools/sitl_gazebo/src/gazebo_usv_dynamics_plugin.cpp中的ignition::math::Matrix4 xformV(vq);语句中,xformV之前没有定义类型
将其修改为ignition::math::Matrix4 xformV(vq);保存之后重新编译。
安装必要的python依赖:(如果前面已经安装可以跳过这步)
cd ~/PX4_Firmware
bash ./Tools/setup/ubuntu.sh --no-nuttx --no-sim-tools
编译
make px4_sitl_default gazebo
如果编译报错提示PX4_Firmware/Tools/sitl_gazebo/src/gazebo_usv_dynamics_plugin.cpp中的ignition::math::Matrix4 xformV(vq);语句中,xformV之前没有定义类型
将其修改为ignition::math::Matrix4 xformV(vq);保存之后重新编译。
修改 ~/.bashrc,加入以下代码,注意路径匹配
source ~/catkin_ws/devel/setup.bash
source ~/PX4_Firmware/Tools/setup_gazebo.bash ~/PX4_Firmware/ ~/PX4_Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/PX4_Firmware/Tools/sitl_gazebo
source ~/.bashrc
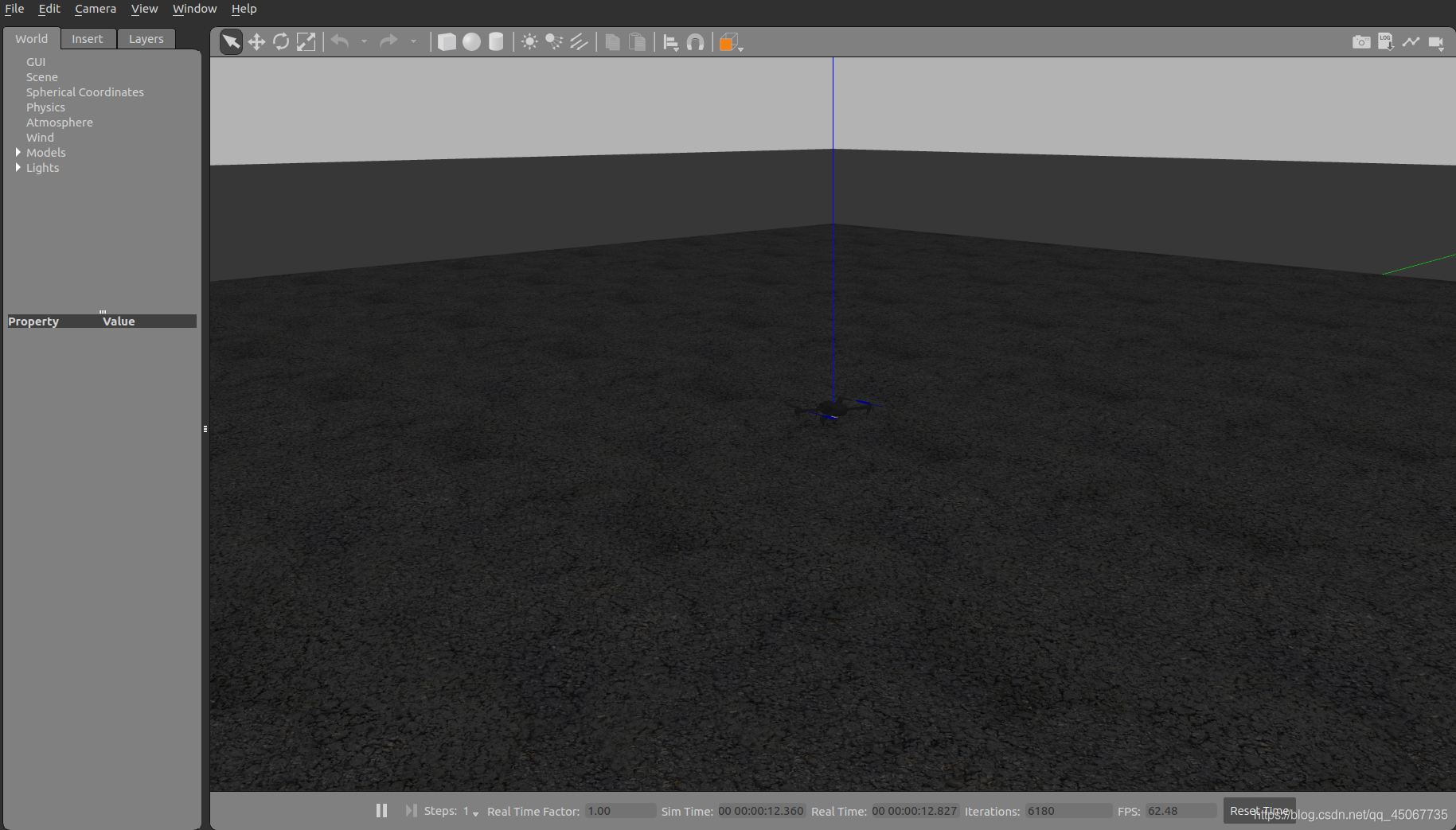
然后运行如下命令,此时会启动Gazebo,如下图所示。
cd ~/PX4_Firmware
roslaunch px4 mavros_posix_sitl.launch
并运行
rostopic echo /mavros/state
若connected: True,则说明MAVROS与SITL通信成功。如果是false,一般是因为.bashrc里的路径写的不对,请仔细检查。
---
header:
seq: 11
stamp:
secs: 1827
nsecs: 173000000
frame_id: ''
connected: True
armed: False
guided: False
manual_input: True
mode: "MANUAL"
system_status: 3
---
注意:
1.有条件的建议科学上网下载。GitHub上下载速度比较缓慢,还可能失败,我也尝试过修改网络什么的效果几乎没有,建议在git clone之前把GitHub上PX4源码的放到码云(gitee)上,码云的使用请大家自行搜索。
如果是把代码放到码云上下载,在更新子模块(git submodule update --init --recursive)中还是从GitHub上下载速度也是很慢,这个需要修改submodule,修改方法上面已经提到。
2.make px4_sitl_default gazebo这个过程可能比较考验电脑内存,我电脑有几次CPU都是100%运行,而且停下卡住
情况可能如下:
可以尝试先增加临时swap空间,再执行make px4_sitl_default gazebo指令,或者直接再次执行make px4_sitl_default gazebo指令,可能需要多次执行。
sudo dd if=/dev/zero of=/home/swap bs=64M count=16
sudo mkswap /home/swap (可能会提示warning: don't erase bootbits sectorson whole disk. Use -f to force,不用理会)
sudo swapon /home/swap
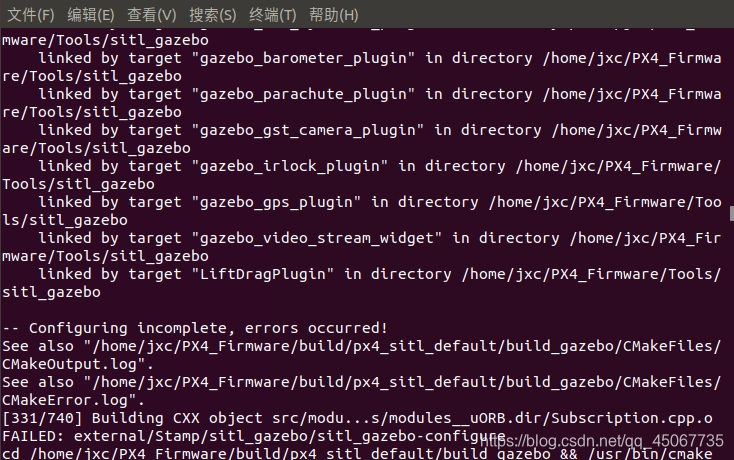
3.在最后一个指令(make px4_sitl_default gazebo)运行时可能出现如下错误:
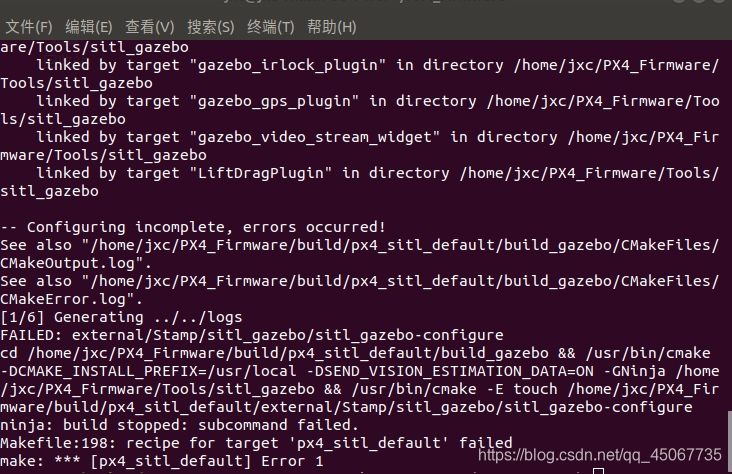
解决方法:
sudo apt-get install libgstreamer-plugins-base1.0-dev
4.运行时可能会出现如下状况:

 这些报错和警告并不影响使用,可以直接无视。
这些报错和警告并不影响使用,可以直接无视。
5.第一次运行时进程比较缓慢,gazebo可能有一段时间黑屏,其实这是在初始化,请耐心等待一下,这是gazebo在联网下载模块,国内的网络下载比较耗时间,把我上面提到的models解压然后放到.gazebo里就行。
6.建议修改./bashrc文件时直接在主目录中修改,用control + h查看隐藏文件,把上面是三行直接复制到最下面然后输入source ~/.bashrc 重启barshc,这样一劳永逸,但是修改完之后每次打开命令行会出现刚刚加进去的

六、QGC地面站安装(选择)
安装链接:https://docs.qgroundcontrol.com/en/getting_started/download_and_install.html
启动后,将出现下图 所示画面。注意Ubuntu16.04没法直接使用QGroundcontrol 版本4系列(可以使用版本3系列),Ubuntu16.04需要源码编译版本4系列,请仔细查看安装链接。

七、XTDrone源码下载
git clone https://gitee.com/robin_shaun/XTDrone.git
cd XTDrone
git submodule update --init --recursive
cp sensing/gimbal/gazebo_gimbal_controller_plugin.cpp ~/PX4_Firmware/Tools/sitl_gazebo/src/
cp sitl_config/init.d-posix/rcS ~/PX4_Firmware/ROMFS/px4fmu_common/init.d-posix/
cp sitl_config/worlds/* ~/PX4_Firmware/Tools/sitl_gazebo/worlds/
cp -r sitl_config/models/* ~/PX4_Firmware/Tools/sitl_gazebo/models/
cp -r sitl_config/launch/* ~/PX4_Firmware/launch/
cd ~/.gazebo/models/
rm -r stereo_camera/ 3d_lidar/ 3d_gpu_lidar/ hokuyo_lidar/
注意由于修改了PX4 sitl_gazebo中的gazebo_gimbal_controller_plugin.cpp(源代码不能控制多无人机的云台),要再编译一次。
cd ~/PX4_Firmware
make px4_sitl_default gazebo
因为Gazebo寻找模型的顺序,是先在.gazebo/models/下寻找,然后在其他路径寻找,所以在往PX4 SITL复制models时,要注意.gazebo/models/下有没有同名文件(比如.gazebo/models/下默认有stereo_camera),有的话要么将该同名文件删去,要么替换该同名文件。
注意:cp -r sitl_config/models/* ~/.gazebo/models/ 这一步可能出现如下情况:
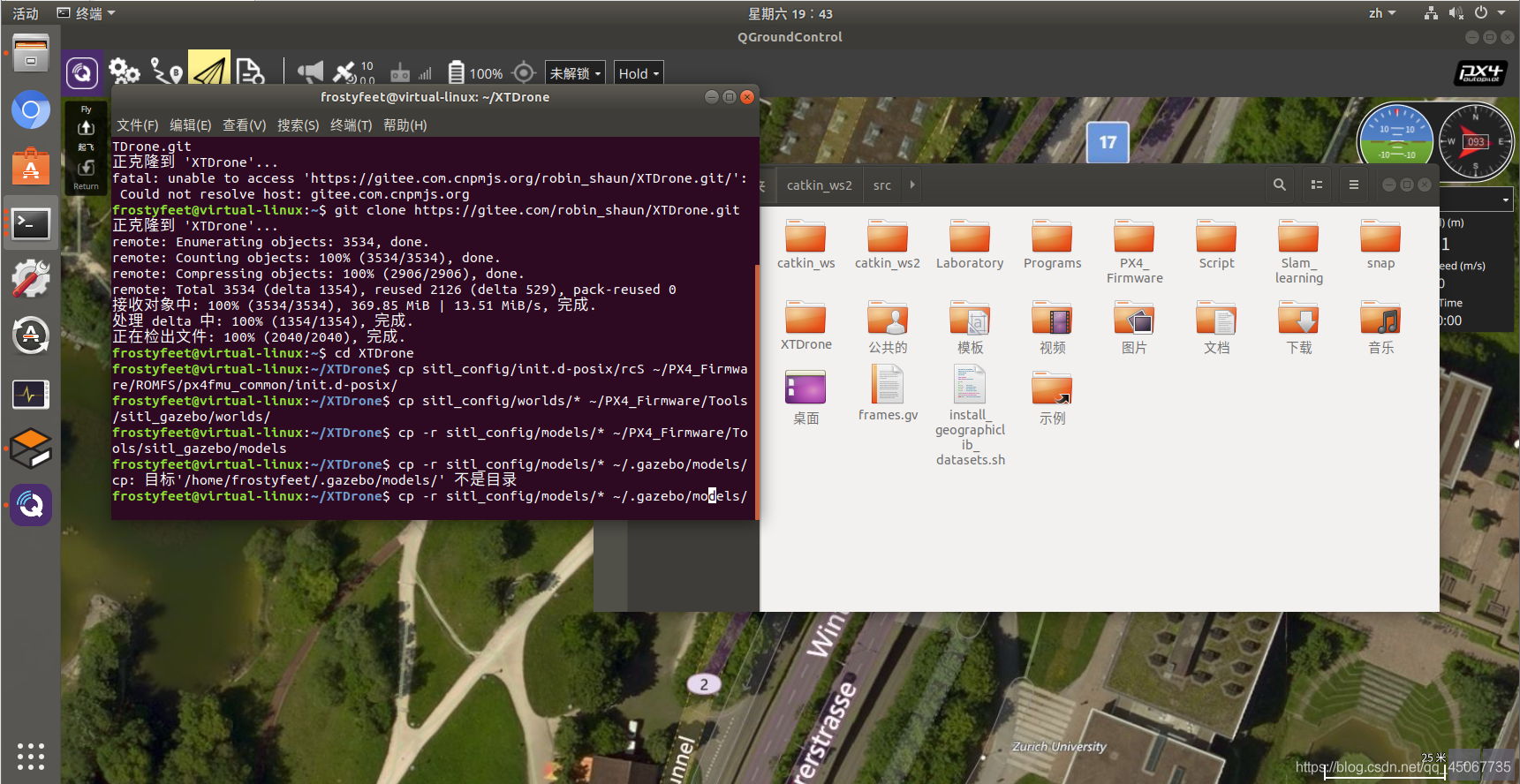
这是gazebo的models没有的原因,按照上面的方法把下载的models解压放到.gazebo文件夹里就行,然后再执行指令就可以
八、用键盘控制无人机飞行
在一个终端运行
cd ~/PX4_Firmware
roslaunch px4 indoor1.launch
第一次运行roslaunch px4 indoor1.launch时gazebo可能需要加载一段时间,请耐心等待
Gazebo启动后,在另一个终端运行
cd ~/XTDrone/communication/
python multirotor_communication.py iris 0
与0号iris建立通信后,在另一个终端运行
cd ~/XTDrone/control/keyboard
python multirotor_keyboard_control.py iris 1 vel
成功后如图所示
可以通过键盘控制1架iris的解锁/上锁,修改飞行模式,飞机速度等。使用t起飞利用的是takeoff飞行模式,相关参数(起飞速度、高度)要在rcS中设置。一般可以使用offboard模式起飞,这时起飞速度要大于0.3m/s才能起飞。(起飞方法:先按t键解锁,再按i键使得upward velocity大于等于0.3,此时可以看到旋翼转起来,最后按b键起飞。这之间的按键的时候间隔应当快一点,否则时间间隔过长的话无人机会自动锁上,又要重复刚刚的步骤)
注意,飞机要先解锁才能起飞!飞到一定高度后可以切换为‘hover’模式悬停,再运行自己的飞行脚本,或利用键盘控制飞机。
推荐起飞流程,按i把向上速度加到0.3以上,再按b切offboard模式,最后按t解锁。
 到此,仿真平台基础配置完成
到此,仿真平台基础配置完成
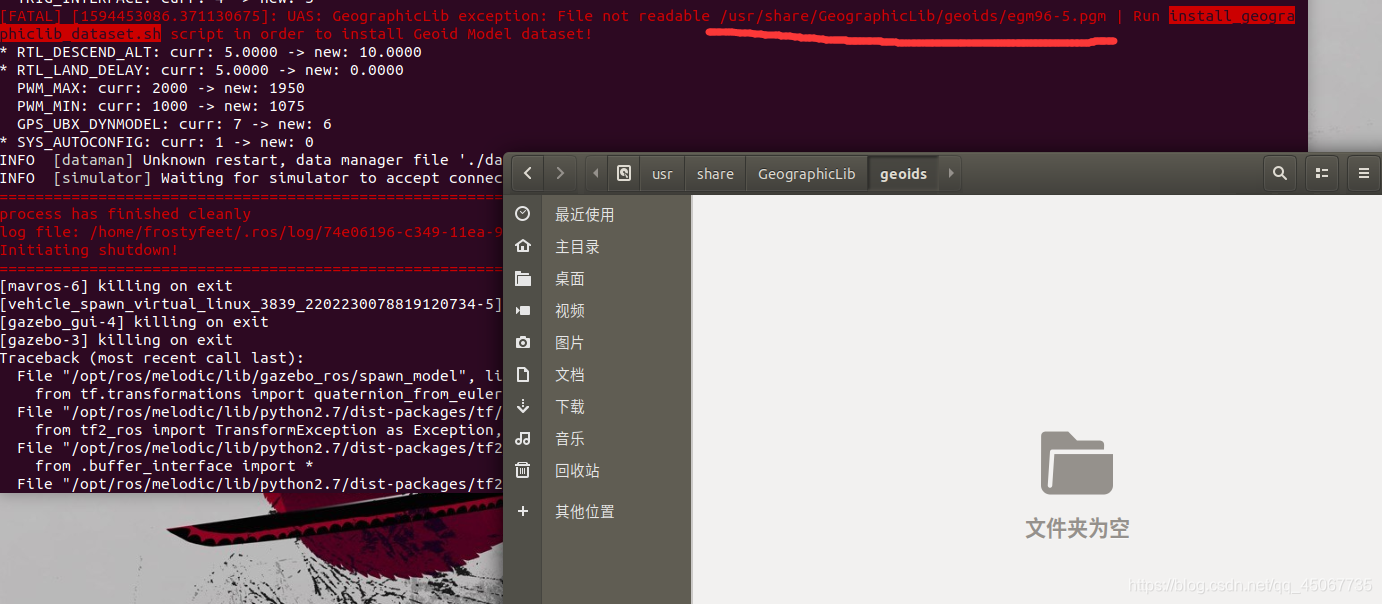
注意:
roslaunch px4 indoor1.launch时可能发生以下错误:
1.
解决方法见:https://blog.csdn.net/abc869788668/article/details/78323395?locationNum=8&fps=1
即输入如下指令:
sudo /opt/ros/melodic/lib/mavros/install_geographiclib_datasets.sh
时间可能较长,需要耐心等待
2.

原作者说可能是三维激光雷达的问题,但是经过几天的尝试我发现安装的gazebo9.0会出现如上错误,而gazebo9.13可以运行,可以尝试把gazebo版本换到9.13进行尝试,这也是我在安装ros和gazebo时建议选择melodic-desktop已经后面安装gazebo9.13或者以上的原因。
4.由于不同版本的Gazebo对光照的设置不同,因此有些场景在一些版本中光照可能不合适,可以手动调整删除一些光照源。如indoor1在Gazebo9.15中,如果不做修改,光线就很亮,可以删除原先的一些光照源,保留下图所示的光照源。

参考网页:
[1]: https://www.yuque.com/xtdrone/manual_cn/basic_config_1.11 如果可以请仔细查看XTDrone的使用文档,会有很多的收获,再顺便在gitee和github上给XTDrone各点一个star吧。
[2]: https://blog.csdn.net/qq_42585108/article/details/106781596
[3]: https://blog.csdn.net/qq_44830040/article/details/106049992
[4]: https://blog.csdn.net/abc869788668/article/details/78323395?locationNum=8&fps=1
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)