之前做的眼在手上的手眼标定,流程结束后,会得到相机坐标系到机械臂末端坐标系的变换关系T_cam2end。我一般直接量取机械臂末端到相机的直线距离来校对z轴方向的距离,但只是做个估算,并未进行精确测量。
我认为手眼标定的误差计算流程:
以眼在手上为例,标定结束后得到T_cam2end,再根据公式计算得到目标和机械臂基底的位姿关系,让相机识别到某一点,然后在机械臂末端加装一个锥形的尖端,通过计算得到的位姿输入到机械臂中,控制机械臂移动到目标上方,用尖端去戳目标,以此来计算精度。
但有个疑问?这么做人工去量取的话,是怎么做到很精确如0.0几个毫米的数量级的,而且量取的只是x、y、z方向的误差,那rx、ry、rz该怎么测量呢?
(PS:如有大佬知道望告知,非常感谢)
思路:
根据标准差的概念,使用样本标准差进行计算。
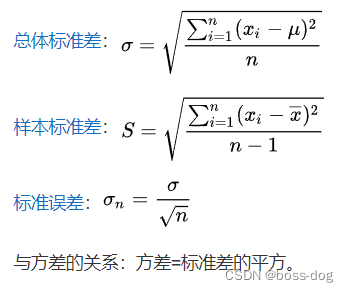
我的做法:完成手眼标定后,得到T_cam2end,将目标图这里以Aruco码为例固定在一处,控制机械臂在不同的角度对目标图进行拍照,我拍了5张,根据下面的公式得到5组目标和机械臂基底之间的位姿关系,因为目标图固定不动,所以目标和机械臂基底之间的位姿关系为固定值,T_cam2end也是固定值,T_end2base和T_target2cam每次的值都不一样,根据样本标准差,计算位姿(X, Y, Z, RX, RY, RZ)的误差值。

代码
std::vector<double> stdev_err_res;
int num = stdev_err[0].size();
int len = stdev_err.size();
for (int i = 0; i < num; i++) {
double mean = 0.0, sum = 0.0;
for (int j = 0; j < len; j++) {
sum += stdev_err[j][i];
}
mean = sum / len;
double square_diff_sum = 0.0;
for (int k = 0; k < len; k++) {
square_diff_sum += std::pow(stdev_err[k][i] - mean, 2);
}
double variance;
variance = (square_diff_sum / (len - 1));
stdev_err_res.push_back(std::sqrt(variance));
}
总觉得这么计算的话,万一样本中有一个值偏差很大或者是错误的,不就增加了整体的误差,暂时还没想到好的方法。。。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)