PX4 Offboard的各种设置
1 设置局域网PX4
<launch>
<arg name="fcu_url" default="/dev/ttyACM0:921600" />
<arg name="gcs_url" default="udp-b://@" />
<arg name="tgt_system" default="1" />
<arg name="tgt_component" default="1" />
<arg name="log_output" default="screen" />
<arg name="fcu_protocol" default="v2.0" />
<arg name="respawn_mavros" default="false" />
<include file="$(find mavros)/launch/node.launch">
<arg name="pluginlists_yaml" value="$(find mavros)/launch/px4_pluginlists.yaml" />
<arg name="config_yaml" value="$(find mavros)/launch/px4_config.yaml" />
<arg name="fcu_url" value="$(arg fcu_url)" />
<arg name="gcs_url" value="$(arg gcs_url)" />
<arg name="tgt_system" value="$(arg tgt_system)" />
<arg name="tgt_component" value="$(arg tgt_component)" />
<arg name="log_output" value="$(arg log_output)" />
<arg name="fcu_protocol" value="$(arg fcu_protocol)" />
<arg name="respawn_mavros" default="$(arg respawn_mavros)" />
</include>
</launch>
主要设置<arg name="gcs_url" default="udp-b://@" />实现广播
2 纯姿态模式定位
SYS_MC_EST_GROUP = Q attitude estimator(no position)
SYS_HAS_BARO = 0
SYS_HAS_MAG = 0
CBRK_IO_SAFETY = 22027
CBRK_USB_CHK = 197848
MAV_1_CONFIG = TELEM 2
SYS_USE_IO = 0
3 使用速度位置控制时,需要关闭GPS
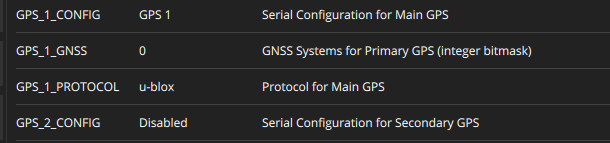
这俩config都给disable了
4 使用EKF2必须开启气压计和磁力计
不然ekf2不工作,不会输出状态。
5 调IMU BAT频率
http://mavlink.io/en/messages/common.html#mav_commands
rosrun mavros mavcmd long 511 105 10000 0 0 0 0 0
rosrun mavros mavcmd long 511 31 10000 0 0 0 0 0
rosrun mavros mavcmd long 511 147 10000 0 0 0 0 0
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)