对于一个典型的带有扰动的二阶系统,其中
d
i
{d_{i}}
di有一阶导数,
d
˙
i
\dot d _{i}
d˙i有界且
−
L
<
d
˙
i
<
L
{-L<\dot d _{i}}<L
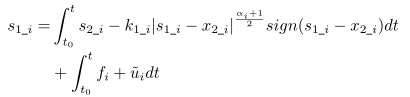
−L<d˙i<L 令扰动观测器为 其中 其中
0
<
α
i
<
1
{0<\alpha _{i}}<1
0<αi<1。 定义
ε
1
_
i
=
s
1
_
i
−
x
2
_
i
{\varepsilon _{1\_i}} = {s_{1\_i}} - {x_{2\_i}}
ε1_i=s1_i−x2_i and
ε
2
_
i
=
s
2
_
i
−
d
i
{\varepsilon _{2\_i}} = {s_{2\_i}} - { d_i}
ε2_i=s2_i−di,由上面的式子得 改写为下面的式子
e
˙
1
=
e
2
−
k
1
∣
e
1
∣
α
+
1
2
s
g
n
(
e
1
)
{{\dot e}_1} = {e_2} - {k_1}{\left| {{e_1}} \right|^{\frac{{\alpha + 1}}{2}}}{\mathop{\rm sgn}} \left( {{e_1}} \right)
e˙1=e2−k1∣e1∣2α+1sgn(e1)
e
˙
2
=
−
k
2
∣
e
1
∣
α
s
g
n
(
e
1
)
−
d
˙
{{\dot e}_2} = - {k_2}{\left| {{e_1}} \right|^\alpha }{\mathop{\rm sgn}} \left( {{e_1}} \right) - \dot d
e˙2=−k2∣e1∣αsgn(e1)−d˙定义
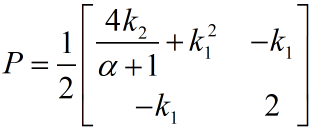
V
=
ξ
T
P
ξ
V = {\xi ^T}P\xi
V=ξTPξ,其中 微分,得 其中 考虑到 所以 所以 当满足
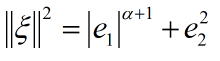
∥
ξ
∥
\left\| \xi \right\|
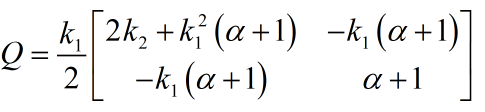
∥ξ∥会收敛到 计算
Q
Q
Q的最小特征值得 最终得,当 所以 而且
∥
ξ
∥
\left\| \xi \right\|
∥ξ∥收敛的时间还是有限的,那么扰动的观测误差也将在有限时间
e
2
≈
0
{e_2} \approx 0
e2≈0。