我决定解决一下pixhawk GPS定点模式下不定点的问题
我觉得正面解决下这个问题,就像当初解决无名那个自动下降的问题,而不是逃避说不用Pixhawk了
不过你有没有发现同样是定高飞,我在湖边定高飞从视频看比第一次在院子定高飞似乎要好些,湖边那还是在大风的情况锡啊,院子里定高那个好像起来就直接飘了。不对,好像还是飘。
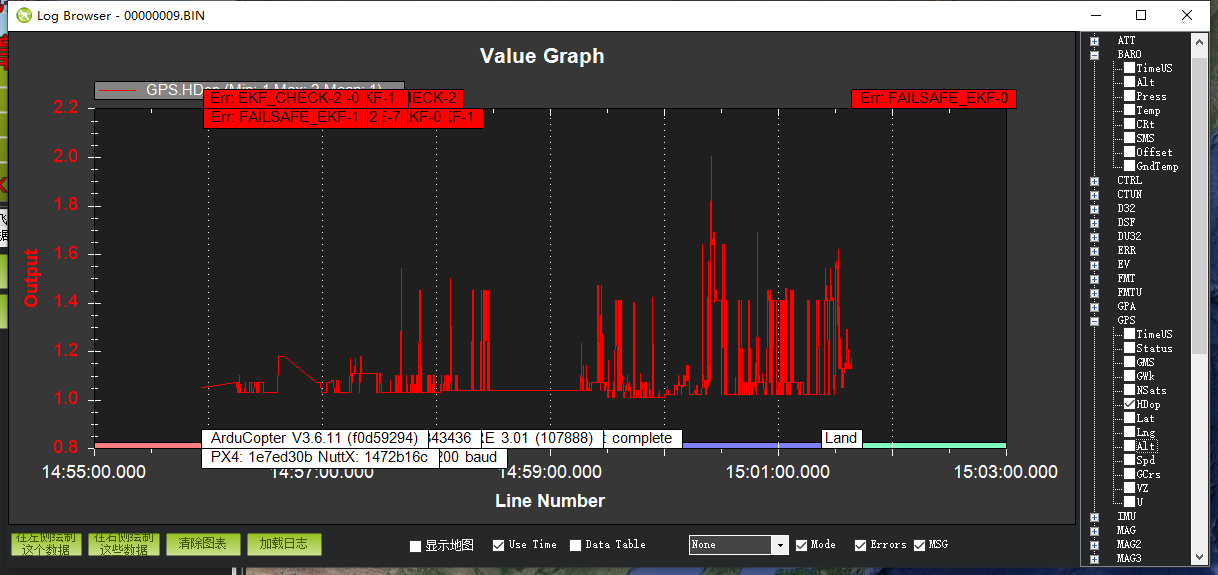
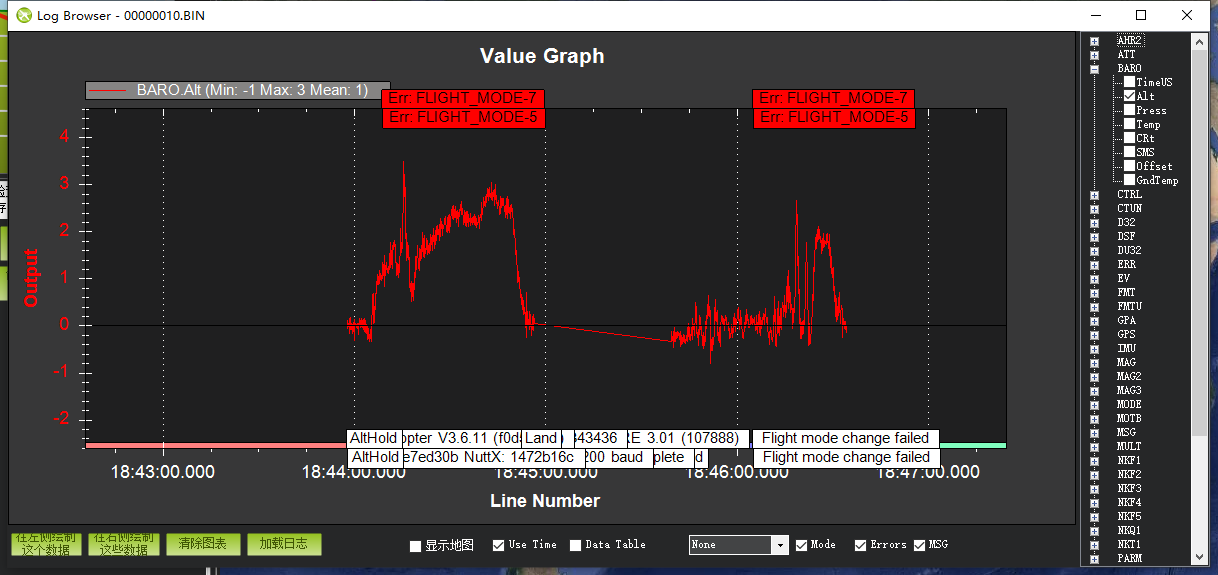
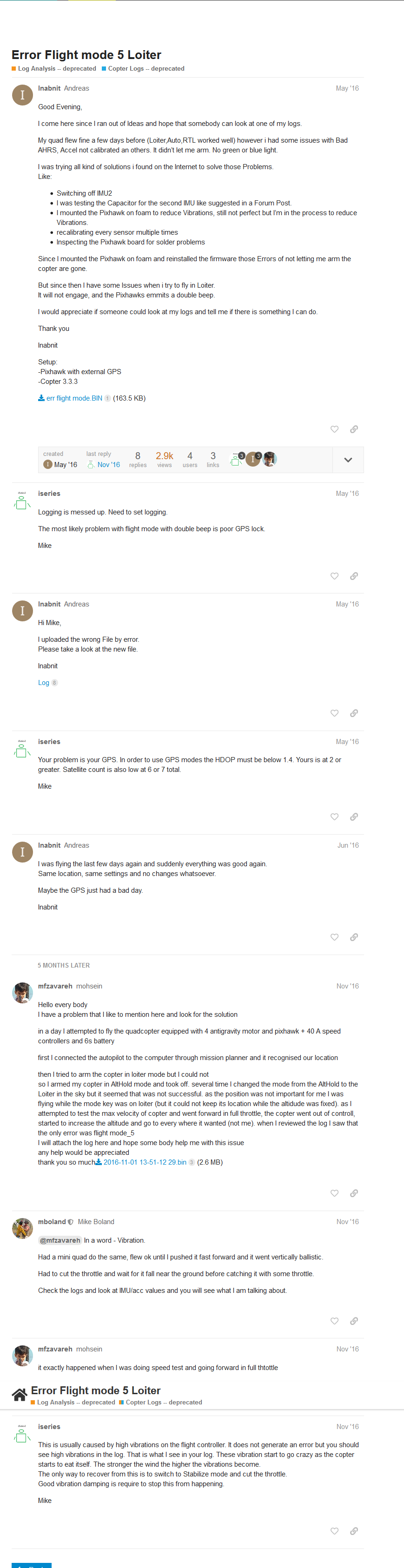
我看了下我的日志,GPS信号是非常好的,你看看卫星数量,上面高度,速度都测出来了,这种情况下还定不好我感觉不是GPS问题啊,是飞控问题啊我感觉,GPS这种模块一般不会出太大问题我觉得。

http://shequ.dimianzhan.com/articles/278

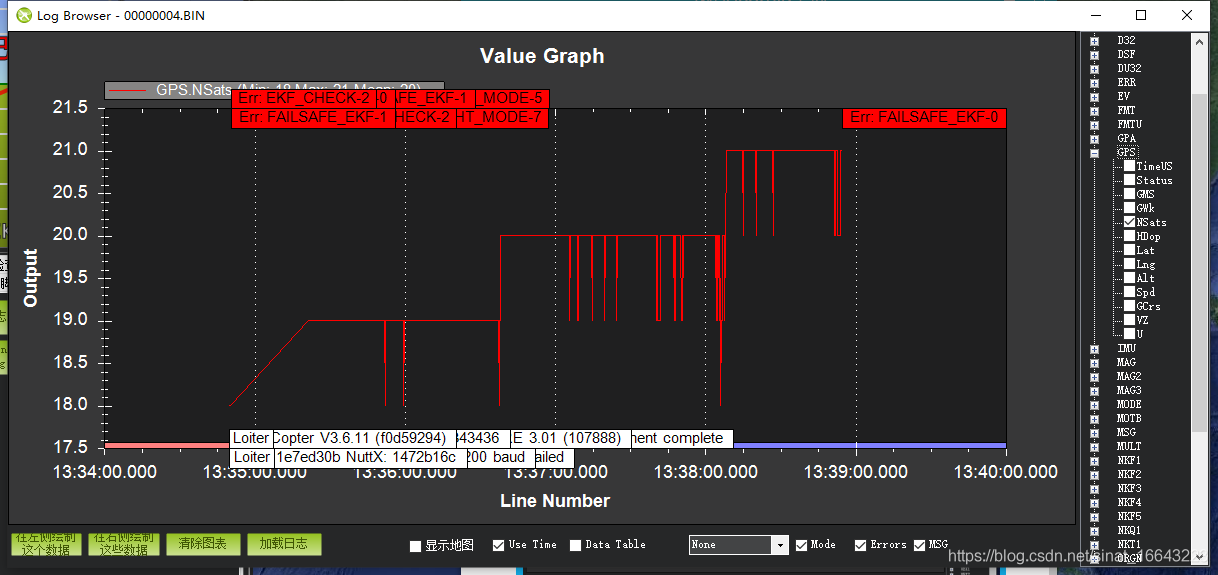
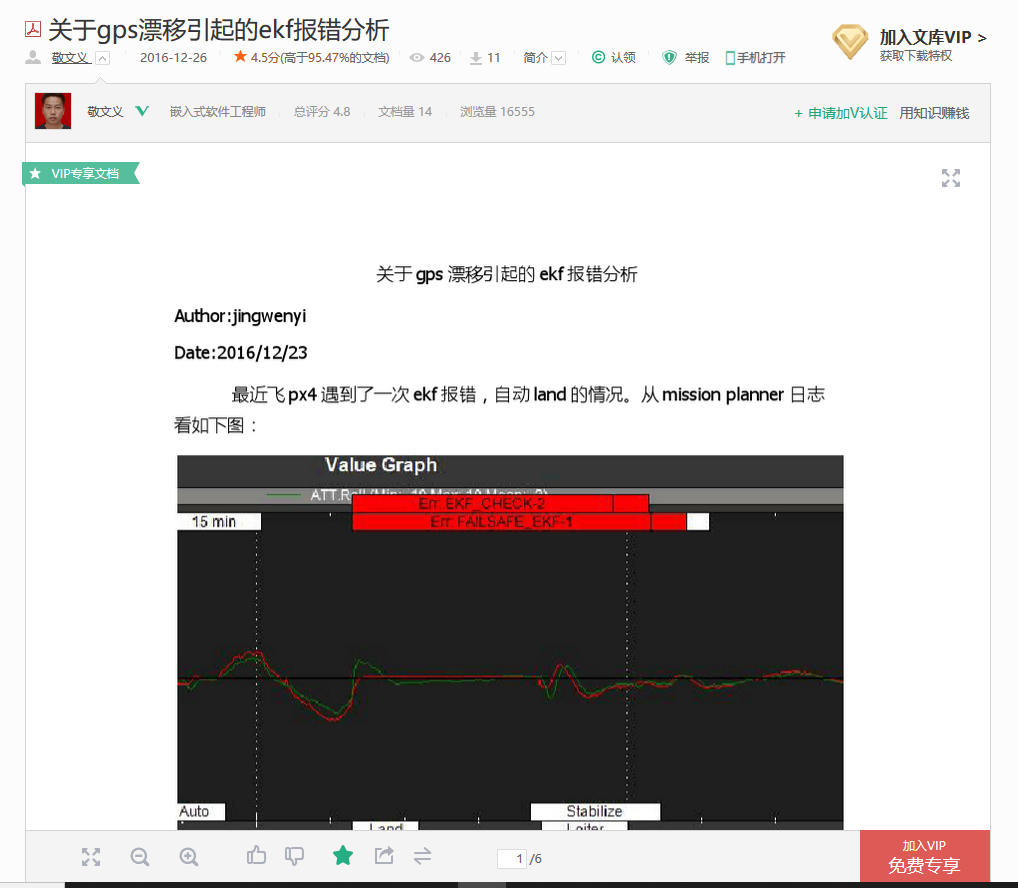
具体看那些error,把线扩展开,会发现它说模式转换失败!!!!是的,那时我可能是在由定高切定点,是的,就是那个时间点,刚起飞不久,而且开关确实切了两次,所以有两个模式转换失败,前面还显示着AltHold。这可能才是我飘的根本原因。
我发觉这个分析得真的对啊,实际没有切。
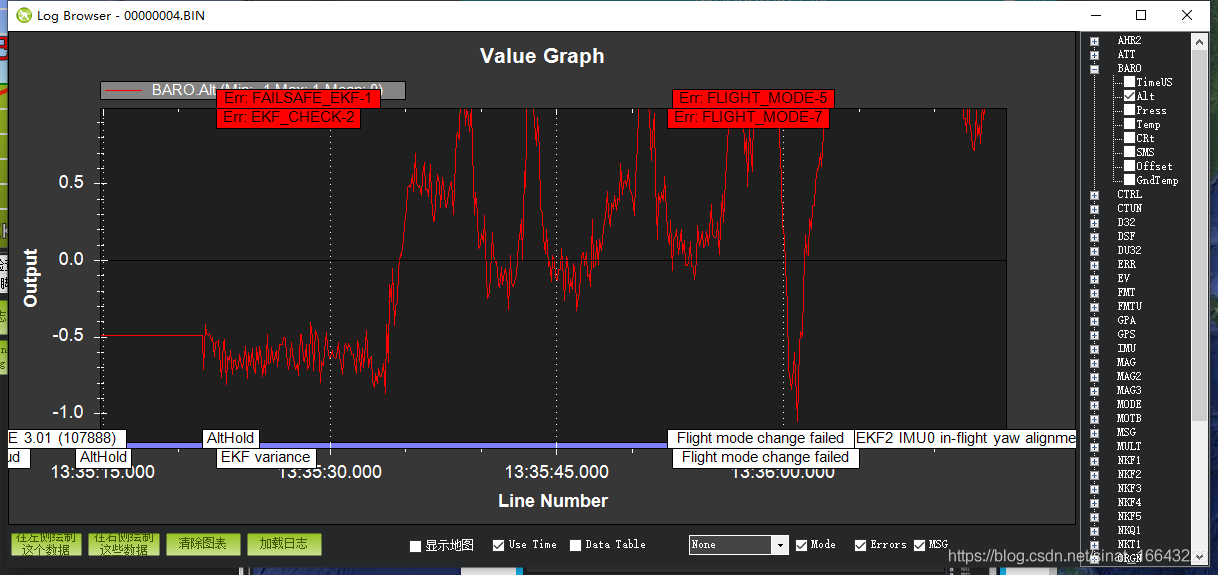
这下面的线的颜色表示飞行模式,可以看到我最开始没起飞前是切到自稳模式,然后切到定高模式。后面一直都是蓝色也就是一直都是定高模式。

我院子里还是有卫星信号的,只是只有11 12颗左右
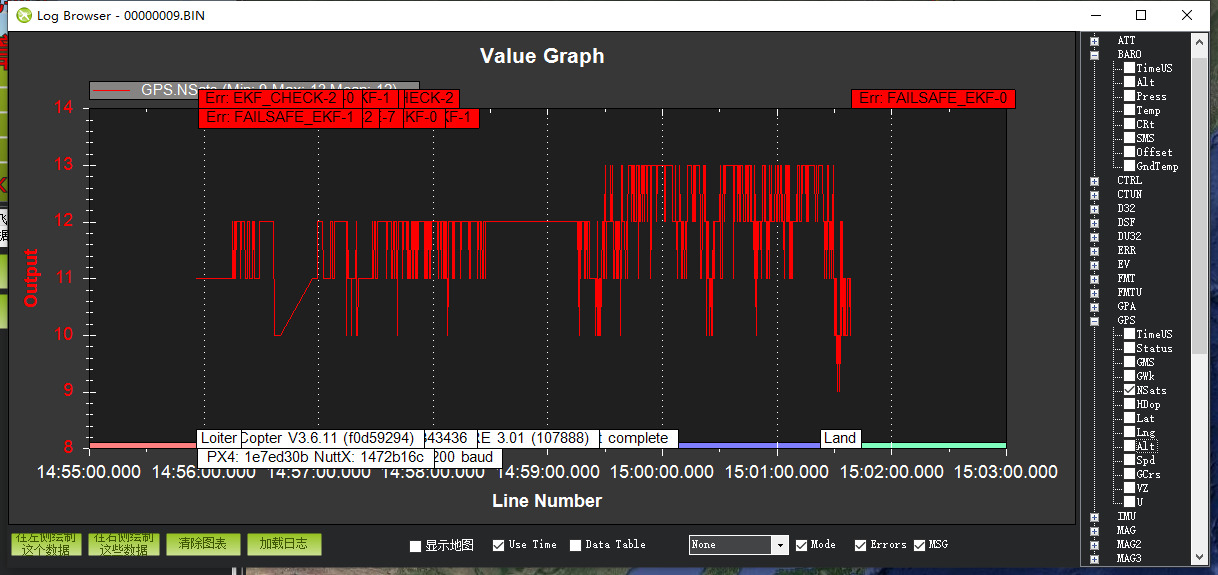
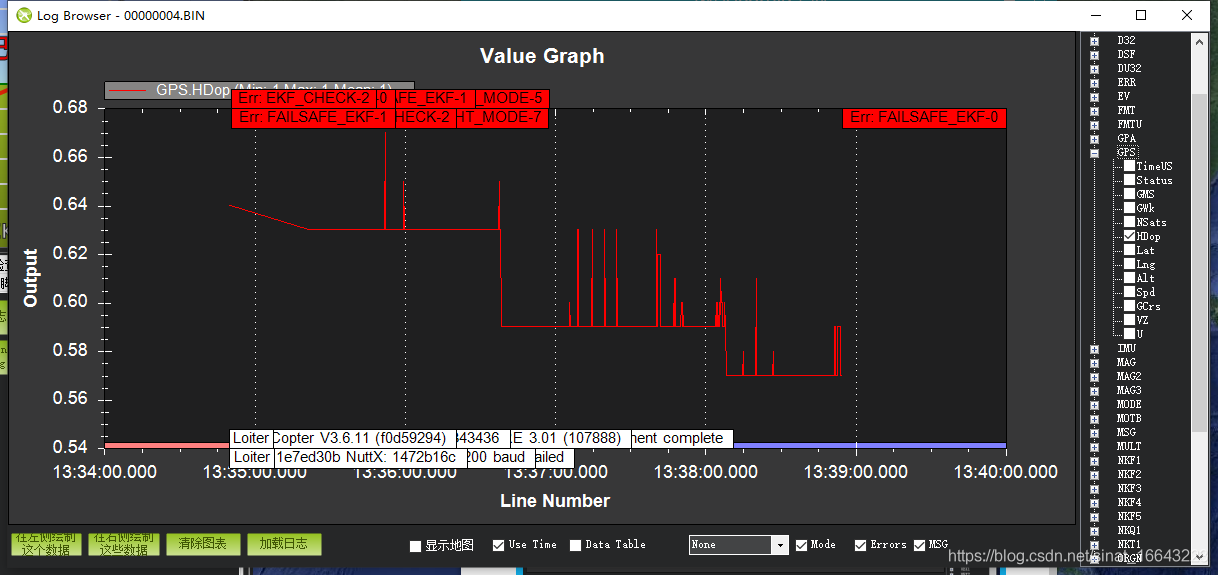
显示的测量精度也还是不错的。
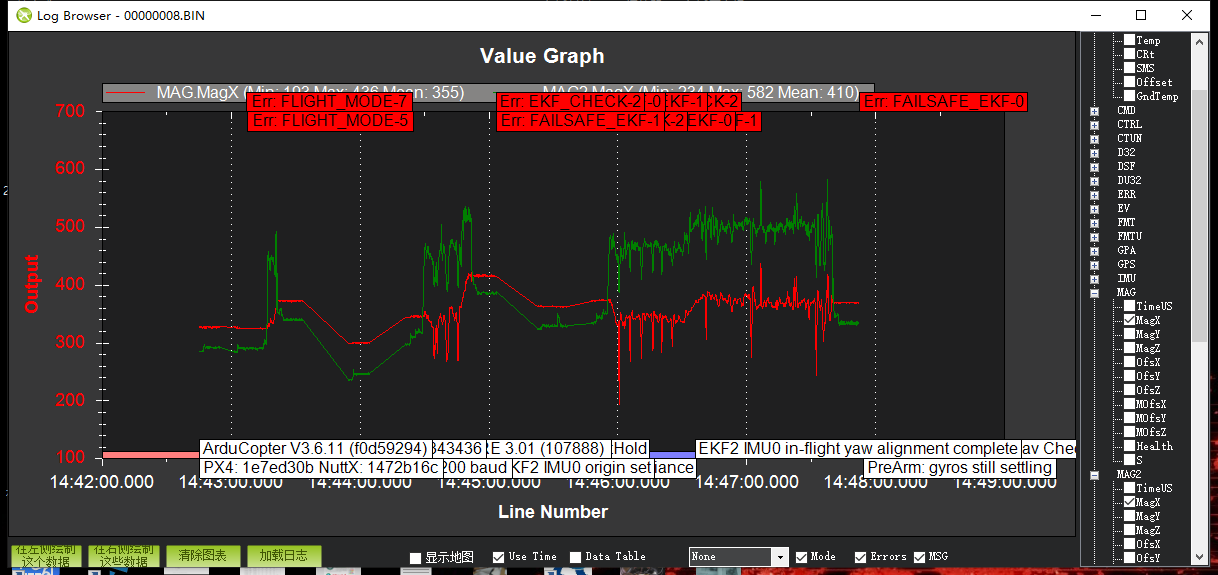
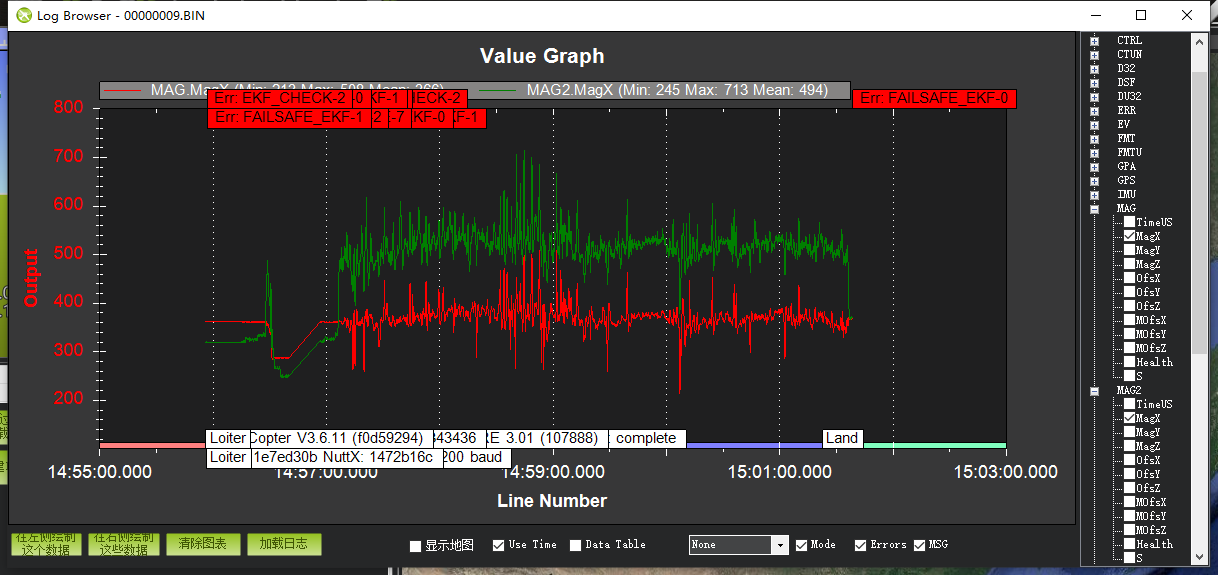
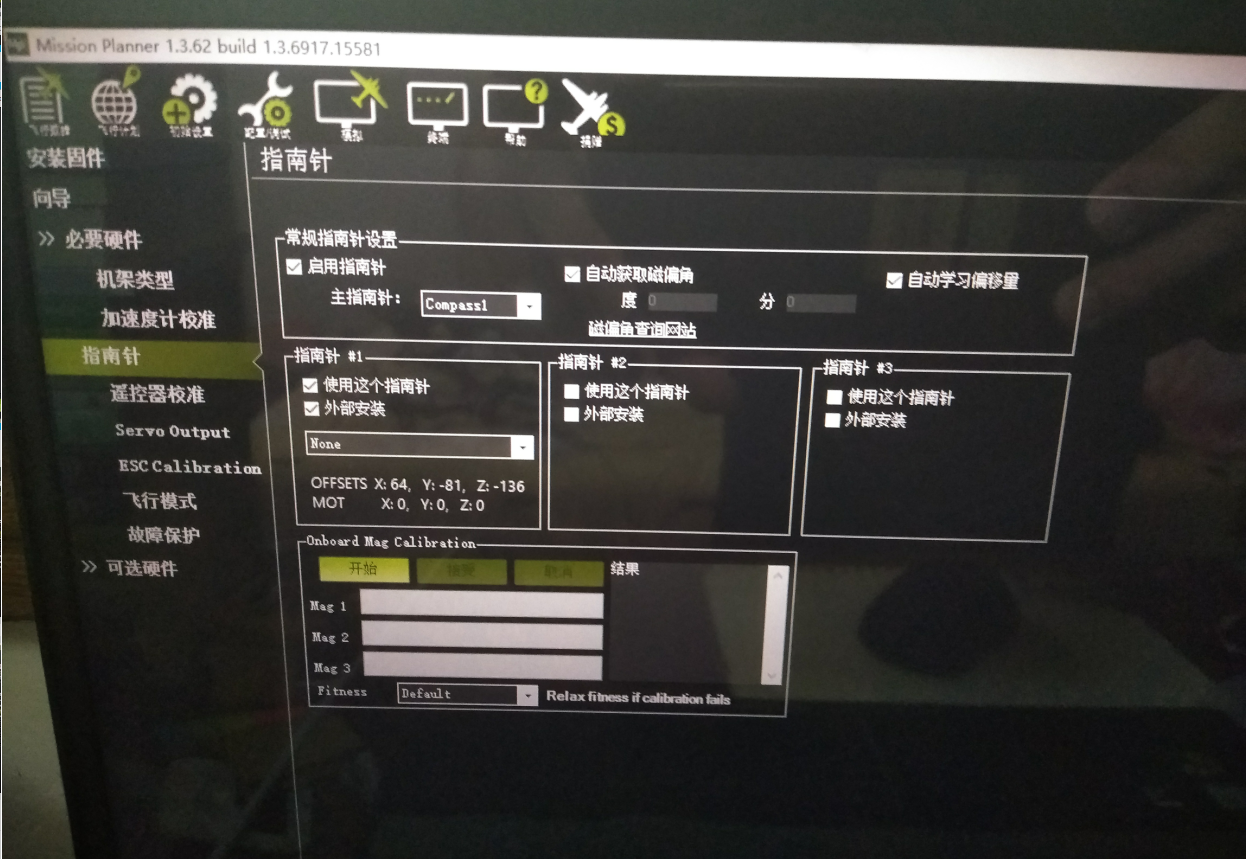
两个罗盘的输出有时候差得有点大
发现一个跟我类似报错的,看来那EKF真的是扩展卡尔曼滤波的意思?
https://wenku.baidu.com/view/9caa9522e97101f69e3143323968011ca200f745.html
百度搜 还真搜到了
还真搜到了
对应我日志里面的报错
这个人好像说偏航角超出合理范围。
http://www.5imx.com/forum.php?mod=viewthread&tid=1078722&_dsign=f48f2543

这也有说到的,也是上面百度出的结果,看来直接百度错误的英文是有用的。他这也说是卡尔曼滤波,看来真的可能是什么让卡尔曼滤波出了问题。
https://blog.csdn.net/liberatetheus/article/details/77914246
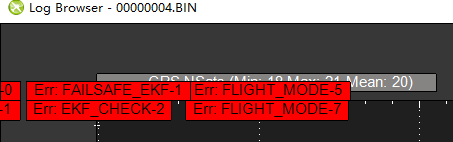
果然我把内部罗盘取消之后,再重新校准罗盘,只用外部罗盘再去飞(这也是昨天那个怒飞垂云给我的建议,他可能是看到我两个罗盘差的数据有点大),回来再看日志,那些EKF的报错没有了 ,就只剩FLIGHT MODE的报错,我觉得把这种错误解决我的Pixhawk应该就可以正常切定点了,至少我解决了EKF的错误,说明是有用的。是的,那些含有EKF的错误都没有了,包括那个FAILSAFE_EKF-0
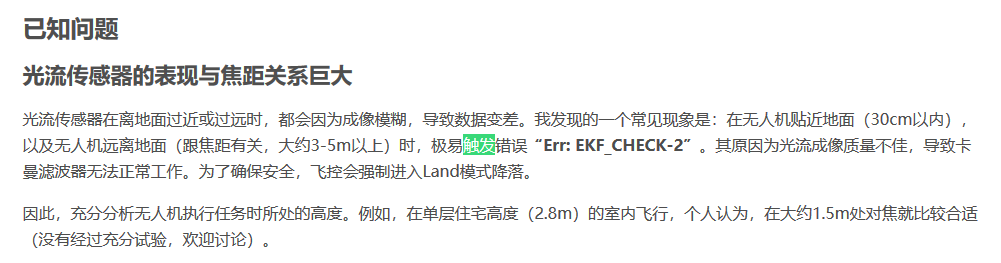
这个报错我百度怎么也没搜到,换成Bing一下子就搜到了!!!!!第一个就是,而且是官方文档!!!(之前看博文时也看到别人说去Google搜BUG,而不是百度,我在文思那蛮,他们好像也用Bing)

官方文档就有这个报错信息。
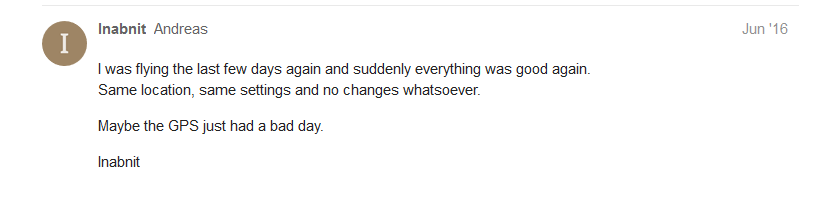
都说是GPS信号不好的问题,那个发问题的人说他换了一天什么数据也没改那些错误就没了!!!
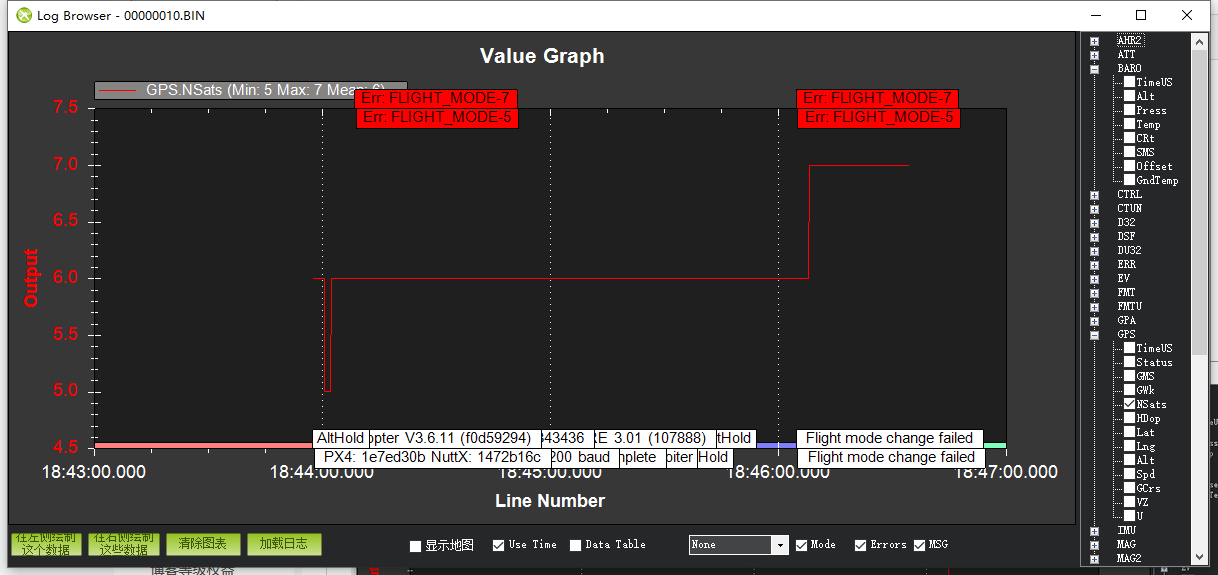
是的,我刚刚看了下我刚刚飞的时候卫星数量只有几颗,质量数为几大于1.5,pixhawk显示绿灯只能说有GPS信号但是不代表GPS信号好!,所以,下次注意了,最好去开阔地或者用地面站看看卫星数量。单看绿色是不够的。
https://discuss.ardupilot.org/t/error-flight-mode-5-loiter/9323/9
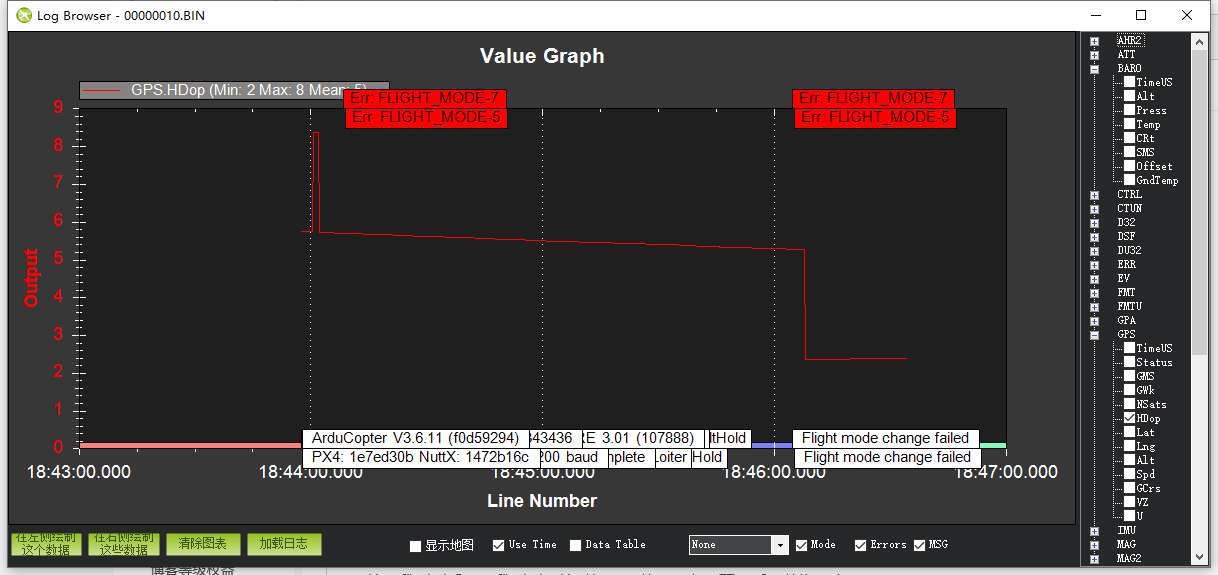
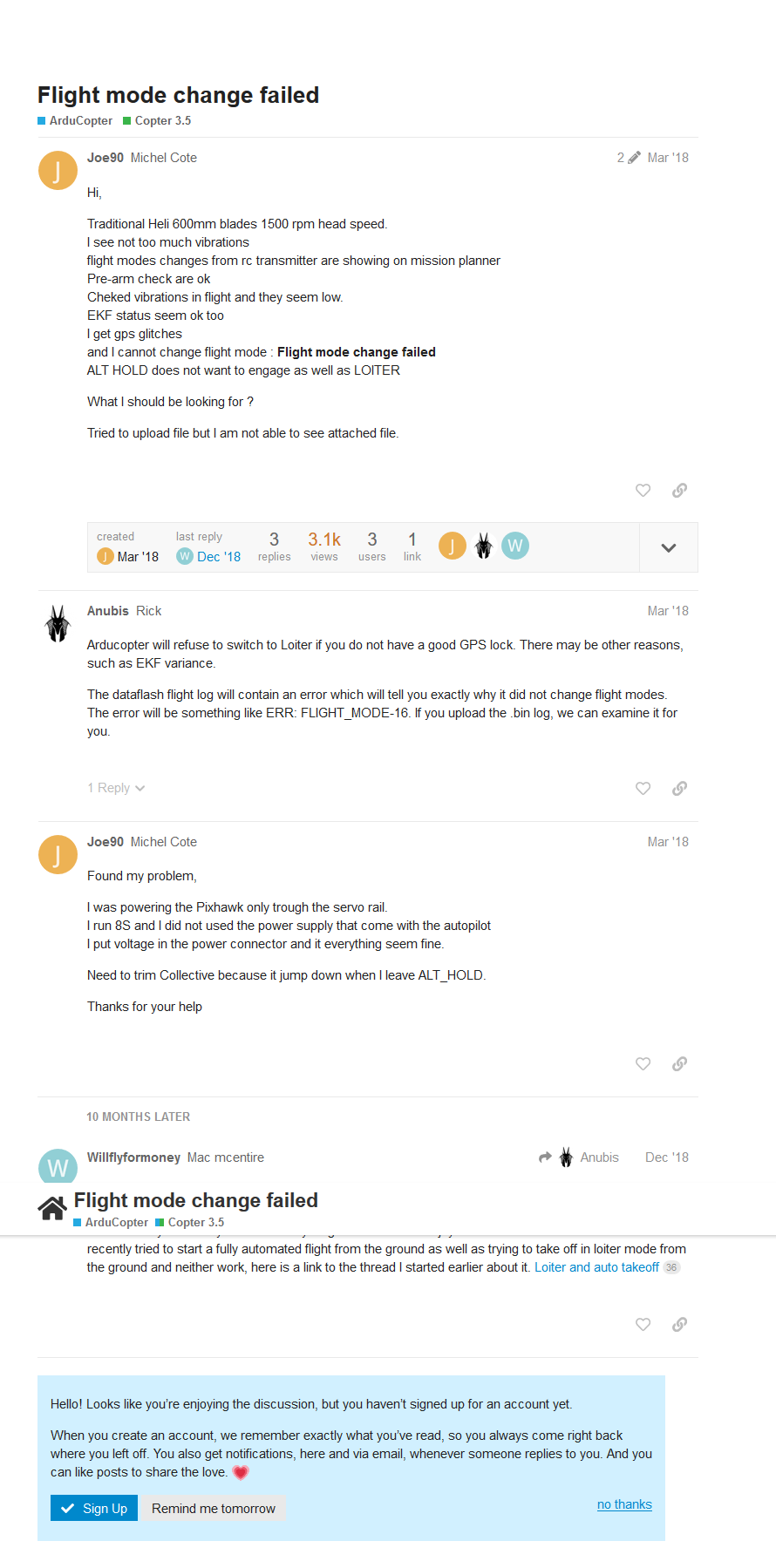
我在bing搜pixhawk Err flight mode-7 出现了 Flight mode change failed
真的是,这个也是百度没有的!!!!这个解决BUG的过程是锻炼人的,辛亏没有逃避,不是说放弃用Pixhawk了。
这个人也跟我一样模式切不了,也有EKF的错误!!!!!
https://discuss.ardupilot.org/t/flight-mode-change-failed-gps-fail/53493/9
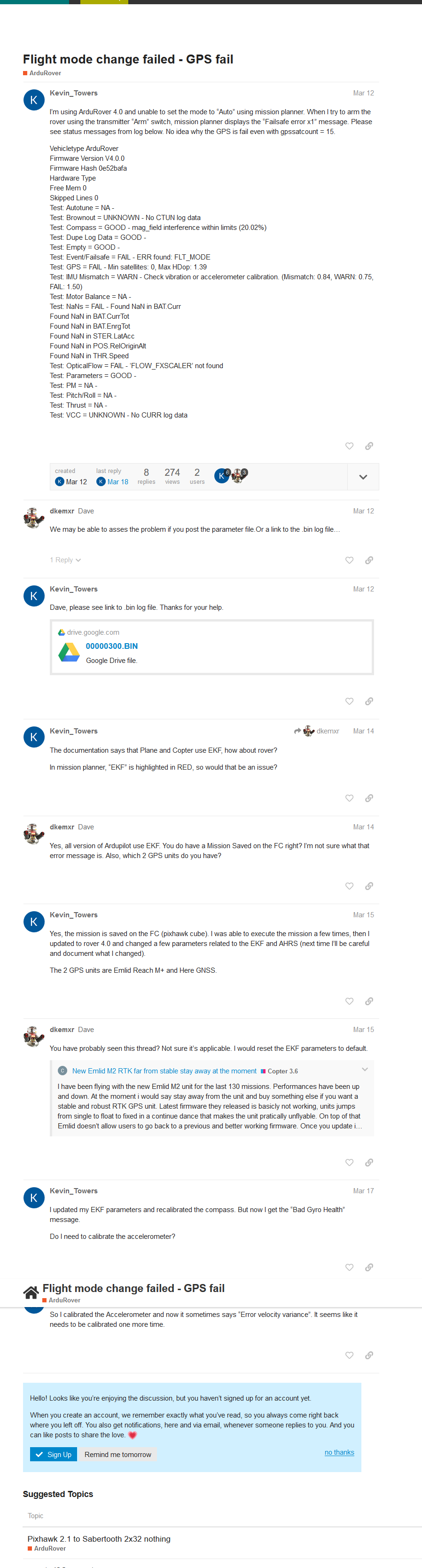
我要是直接在Bing搜Flight mode change failed ,更是一大堆。

第一个就和我的问题一样!!!!定高不能切定点。回答这个的第一个就直接说出了,要么是GPS不好要么是EKF,我的天,不就是这两个么!!!!!!!当然GPS不好我还有待验证!!!!!
我现在看国外的这些没什么困难,是不是考研有长进?感谢朱伟。
https://discuss.ardupilot.org/t/flight-mode-change-failed/26334/4
7月25日刚刚飞
出现了这个
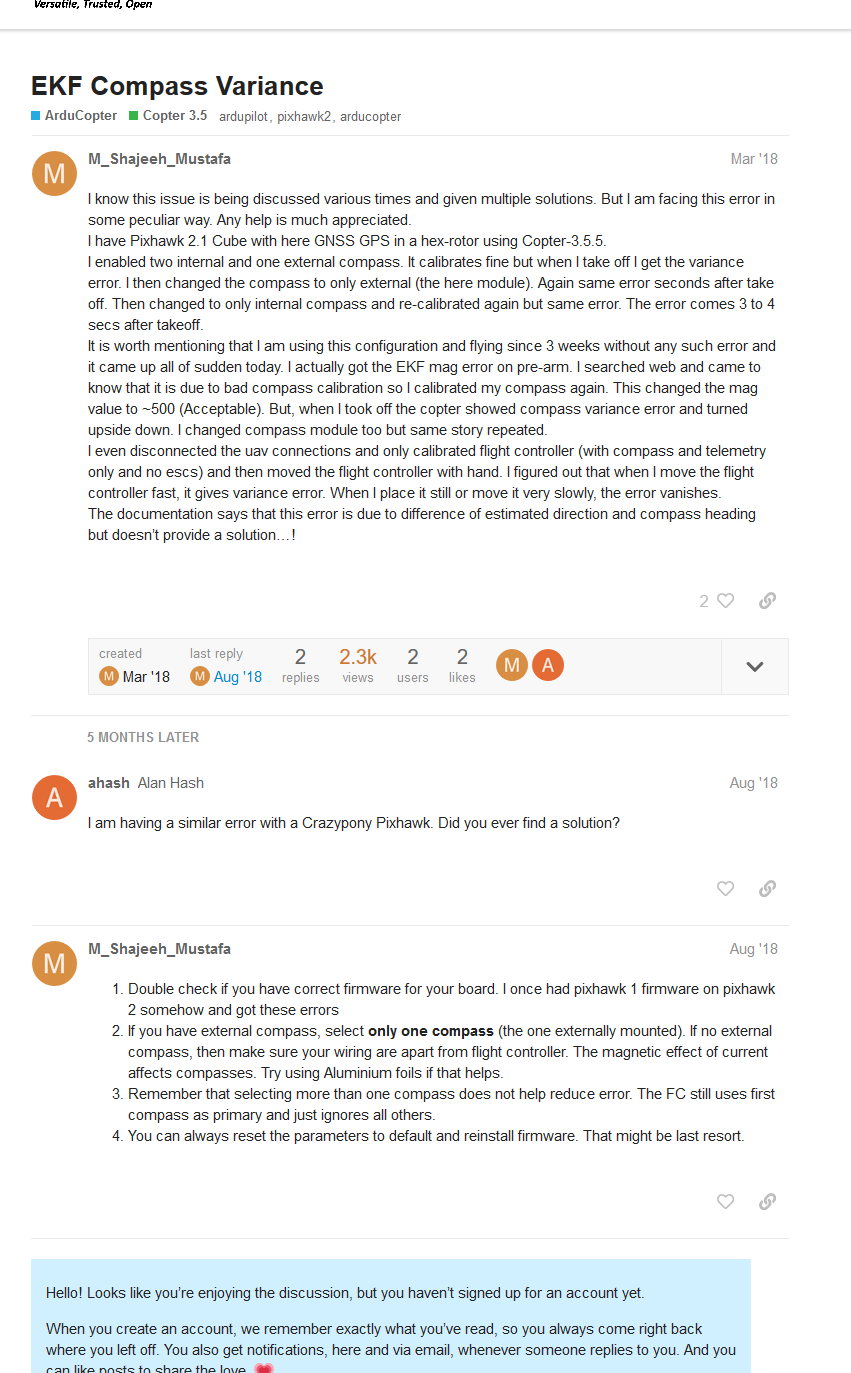
https://discuss.ardupilot.org/t/ekf-compass-variance/26495
这里是说如果你有两个罗盘那就只用一个
7月25日
没有视频记录,因为是我自己去了,来不及拍视频,本身机子飞得就不稳,得实时操控。
可以看日志
11是上午莲花湖边,单用GPS罗盘,12是上午回来改为只用内部罗盘在院子里飞,13,14是只用内部罗盘下午去莲花湖飞。

单靠外部罗盘摇得很厉害,可能是因为GPS那个杆子摇得很厉害。明显看到GPS杆晃动的幅度很大。
今天去莲花湖边试了就单个罗盘,包括单用GPS的罗盘和但用内置罗盘,都效果不行,而且日志都有各种报错,并没有因为说用单个罗盘就少报了某种错误,虽然在院子里时看起来似乎是没报EKF的错误,但是在湖边飞,这种错误依然有。定点模式依旧切不了。
空中飞得很不稳,右上那个电机似乎始终没力,反正很不稳。最后降落后也不关闭,遥控器强制关也没用,我手被打出血了。
我也懒得再弄回原本两个罗盘看是否飞得稳了,因为今天炸机也炸得浆不够了,我也对这个pixhawk2.4.8心灰意冷了。
我决定以后不买他们的杂牌飞控了。
似乎单个罗盘之后就没以前稳,当然只用内置罗盘稳一些,只是好像有个电机无力啥的,
不过我现在怀疑这个飞控就有问题
这个pixhawk用得怀疑人生。
我需要那种把浆卡死的电机 没错,我需要那种,现在这种电机达不到,它不是卡死的 330的那个XK电机我感觉挺好的
回来看日志发现还是报那些错,没有减少。
我是没劲折腾了 我宁愿换个飞控,真的很可能是硬件原因,如那个上交的人所说。
==========================================================================================
看下面,出现最多的是说罗盘,其次是说GPS。
http://www.nufeichuiyun.com/?p=28
这个人和我的感觉一样,来一阵风就吹跑了。这不应该是定点模式该出现的情况。
http://www.5imx.com/forum.php?mod=viewthread&tid=1177806

这样百度能搜出一些

这里都说是罗盘出问题了
https://www.moz8.com/forum.php?mod=viewthread&tid=64984

https://zhidao.baidu.com/question/426012015383949732.html
这里也是说要么GPS问题要么罗盘问题
https://tieba.baidu.com/p/5007314514


这是大疆的,大疆的大风情况下似乎GPS定点也不行。
https://bbs.dji.com/thread-90417-1-1.html
也有可能是飞控问题
https://www.zhihu.com/question/308974312

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)