Alttude(m):设置任务高度。——此处应和起飞航线第三点高度相同。 Angle(deg):设置航线角度。——生成的航线一般来说都是最优角度,不需要手动修 改,但我们仍可通过修改此处角度来达到更优的航线角度。 Camera top facing forward:设置相机方向,不选择为竖向安装,选择为横向安装——
该设备相机为横向安装,请打勾选中。
Flying speed(est)(m/s):航线内空速。此处一般有值,需要选中删除原来值之后输 入空速值,该设备空速值为 18,通过设置该值可以看到航线内大概飞行时间,可为规划航 线做依据。 Use speed for this mission:是否使用该空速。——因为该设备空速在出厂时已经设置 完成,为避免错误操作所带来不可预想的后果,请不要勾选该选项。 Add Takeoff and land WP’S:是否添加起飞航点。——由于起飞航线已手动规划完毕, 请不要勾选该选项。 Use RTL:是否使用返航;——不使用,请不要勾选该选项。 Split into x segments:跨越航线飞行。——不使用,请设置为 1.



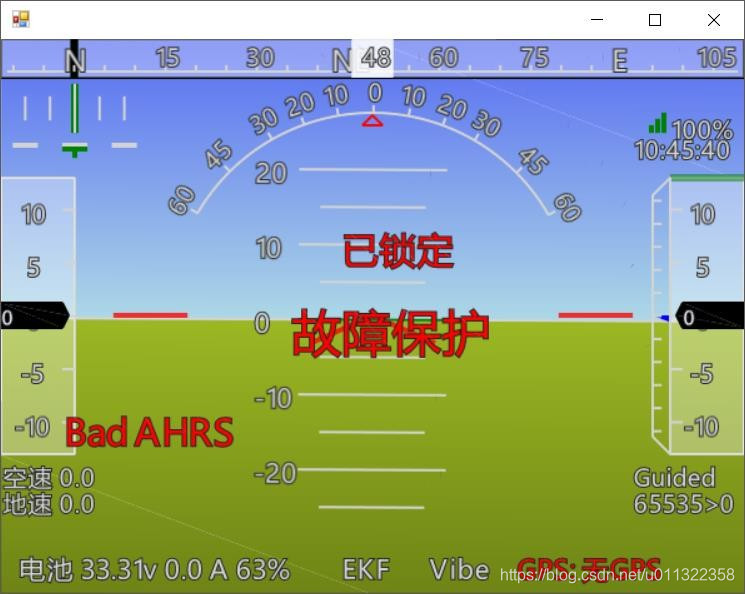 在 hud 面板的左下角检查电池电压,起飞前电压必须在 33.0V 以上,如果低于 33.0V 电池所剩余电量将不足以支持此次飞行。
在 hud 面板的左下角检查电池电压,起飞前电压必须在 33.0V 以上,如果低于 33.0V 电池所剩余电量将不足以支持此次飞行。
 3.3 空速检查
3.3 空速检查
 点击动作菜单,选择 Trigger Camera NOW 点击执行动作,此时会听到相机拍 照声音,如果此时相机不拍照,请检查连接。我们也可以通过拨动遥控器上 SD 开关来触发拍照。
点击动作菜单,选择 Trigger Camera NOW 点击执行动作,此时会听到相机拍 照声音,如果此时相机不拍照,请检查连接。我们也可以通过拨动遥控器上 SD 开关来触发拍照。



 在空白处右击鼠标,选择地图工具,KML 覆盖,
在空白处右击鼠标,选择地图工具,KML 覆盖,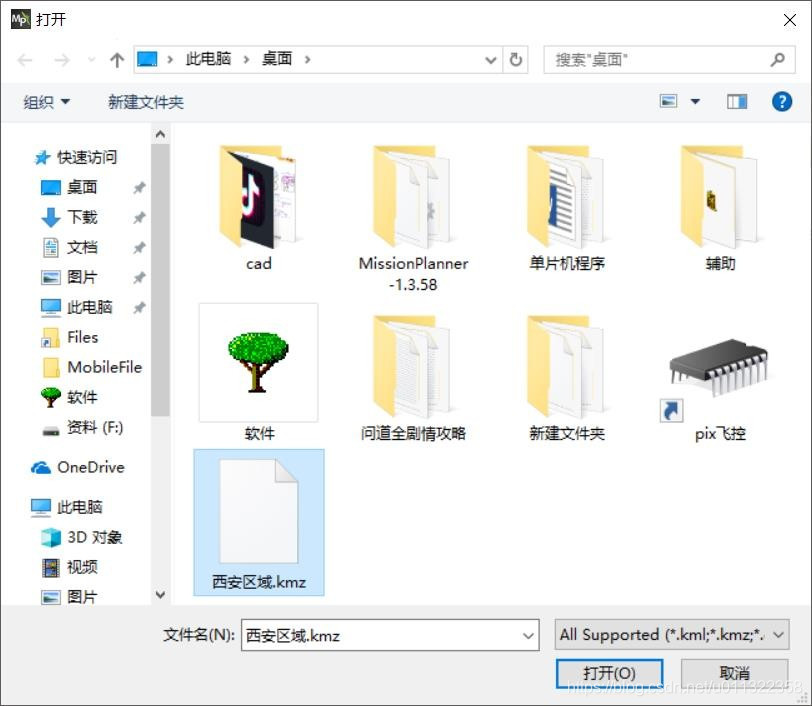 在“打开”面板选择飞行 KMZ 范围图,点击打开
在“打开”面板选择飞行 KMZ 范围图,点击打开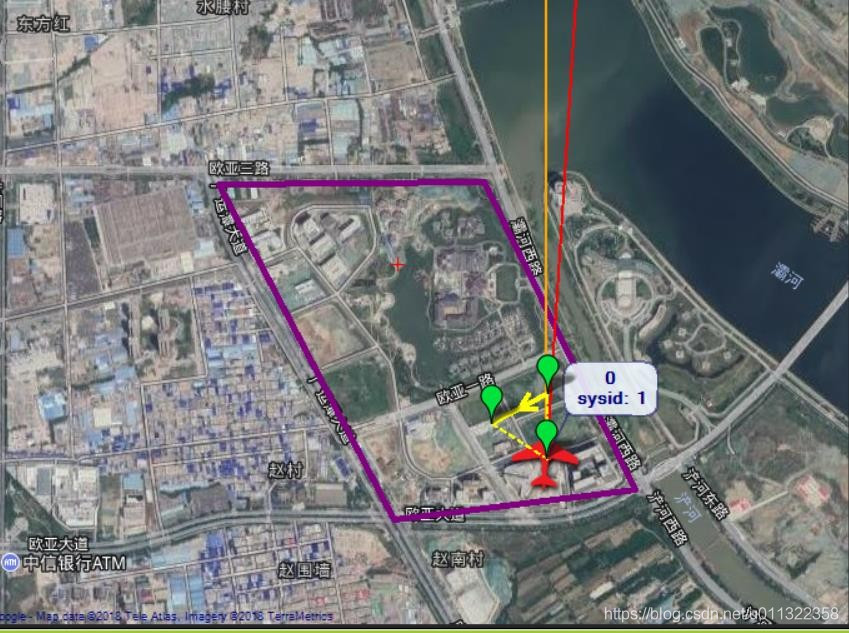 4.2.2 绘制多边形
4.2.2 绘制多边形 在空白处右击鼠标选择绘制多边形,添加多边形点。
在空白处右击鼠标选择绘制多边形,添加多边形点。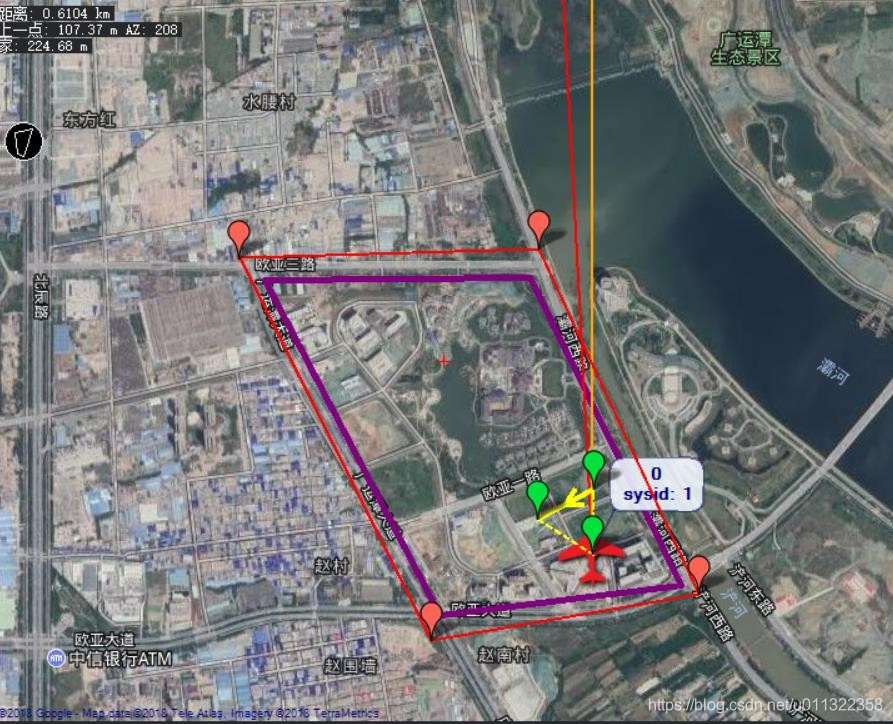 依次点击范围线顶点,圈选作业范围,为了能保证作业质量,我们希望多边形 范围能超出 KML 范围线区域
依次点击范围线顶点,圈选作业范围,为了能保证作业质量,我们希望多边形 范围能超出 KML 范围线区域 4.2.3 作业航线规划面板,右击空白区域选择自动航点,Survey(Grid)进入作业航线规划面板,
4.2.3 作业航线规划面板,右击空白区域选择自动航点,Survey(Grid)进入作业航线规划面板, 在右边 Simple 选项卡下,设置相机、航线高度等信息
在右边 Simple 选项卡下,设置相机、航线高度等信息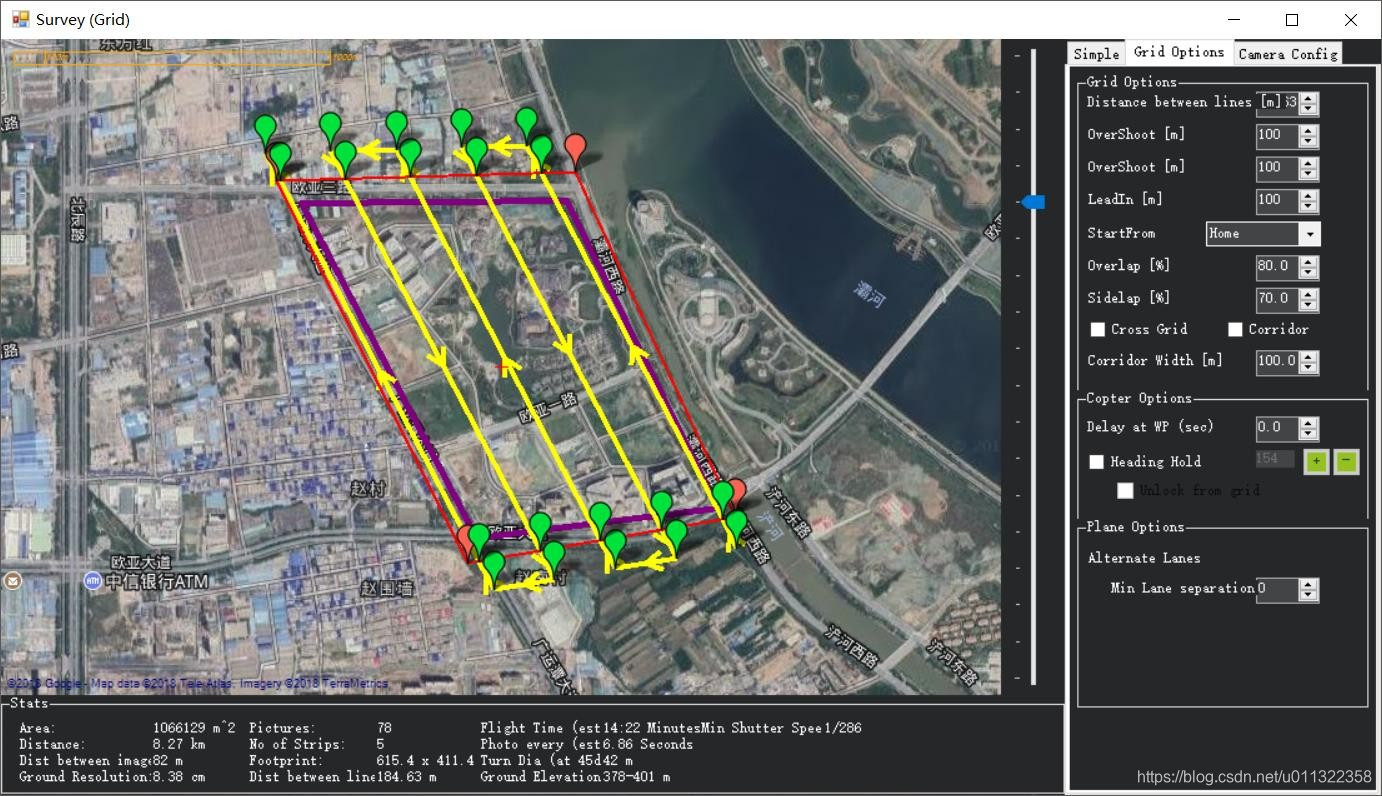
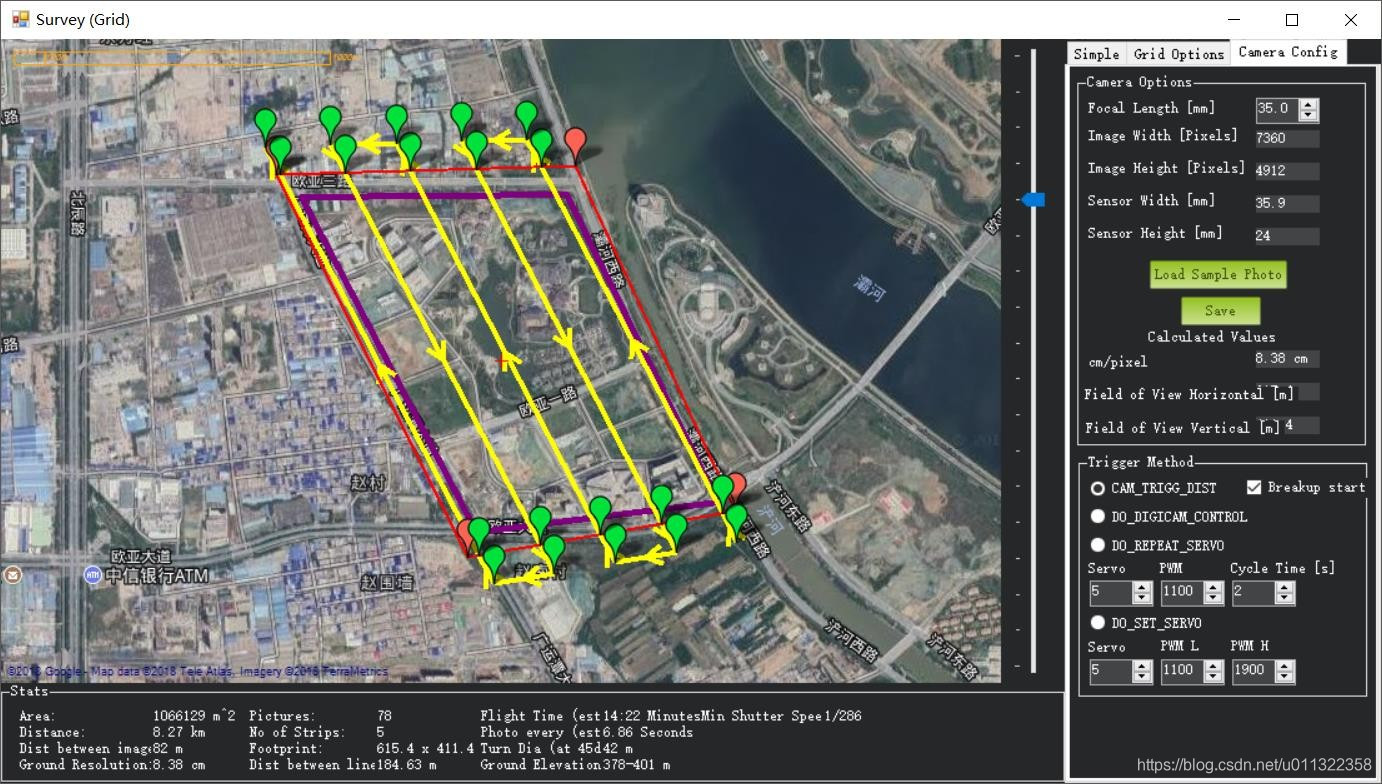 Camera config 里面的参数为相机参数,请不要手动修改。
Camera config 里面的参数为相机参数,请不要手动修改。
 在确定航线规划无误后可点击 accept 按钮来生成航线
在确定航线规划无误后可点击 accept 按钮来生成航线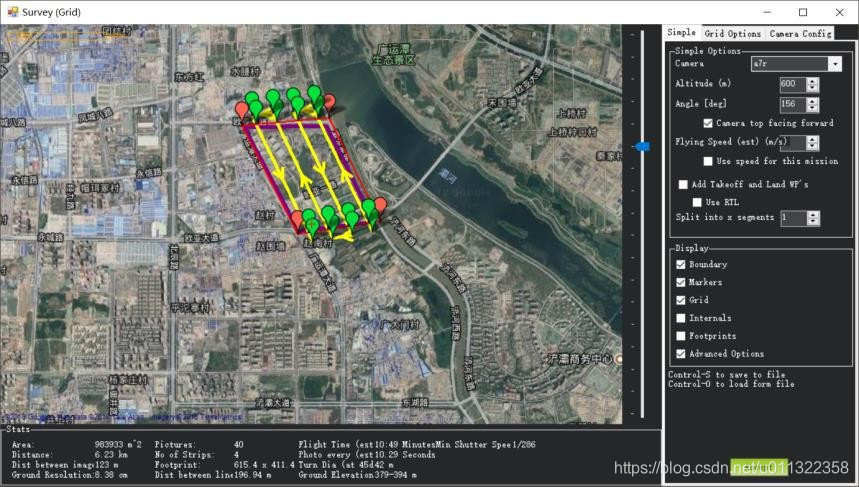
 首先,请清除多边形,在空白处点击鼠标右键,绘制多边形,清除多边形
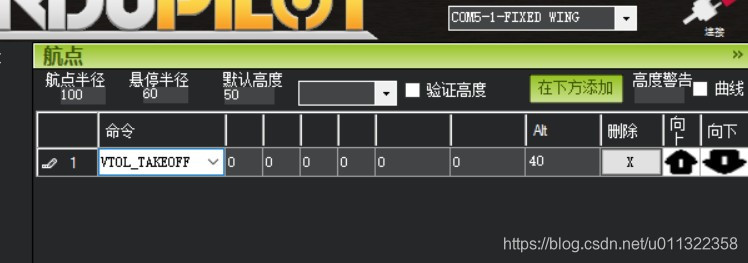
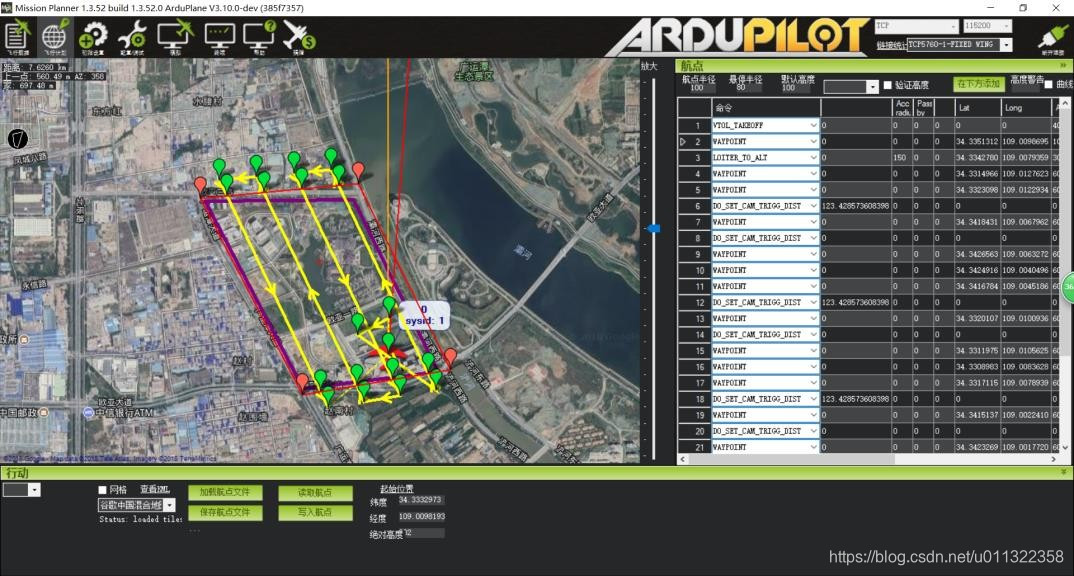
首先,请清除多边形,在空白处点击鼠标右键,绘制多边形,清除多边形 添加过度点:在家的附近添加航点,高度需和航向内高度一致
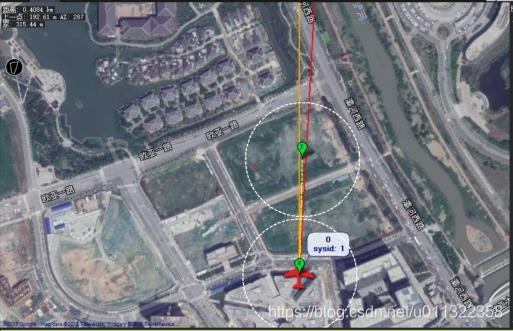
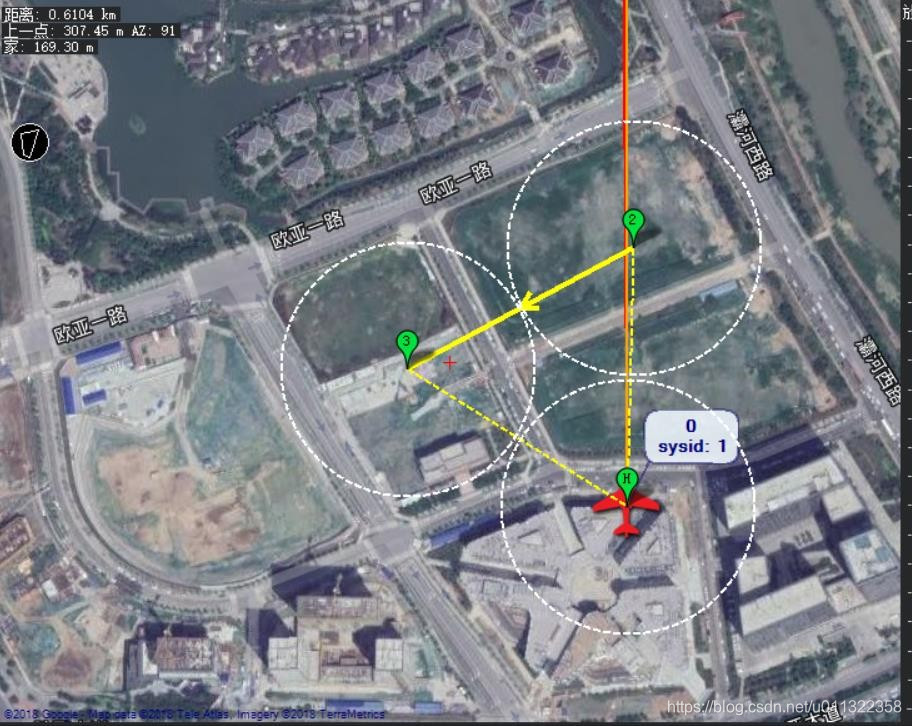
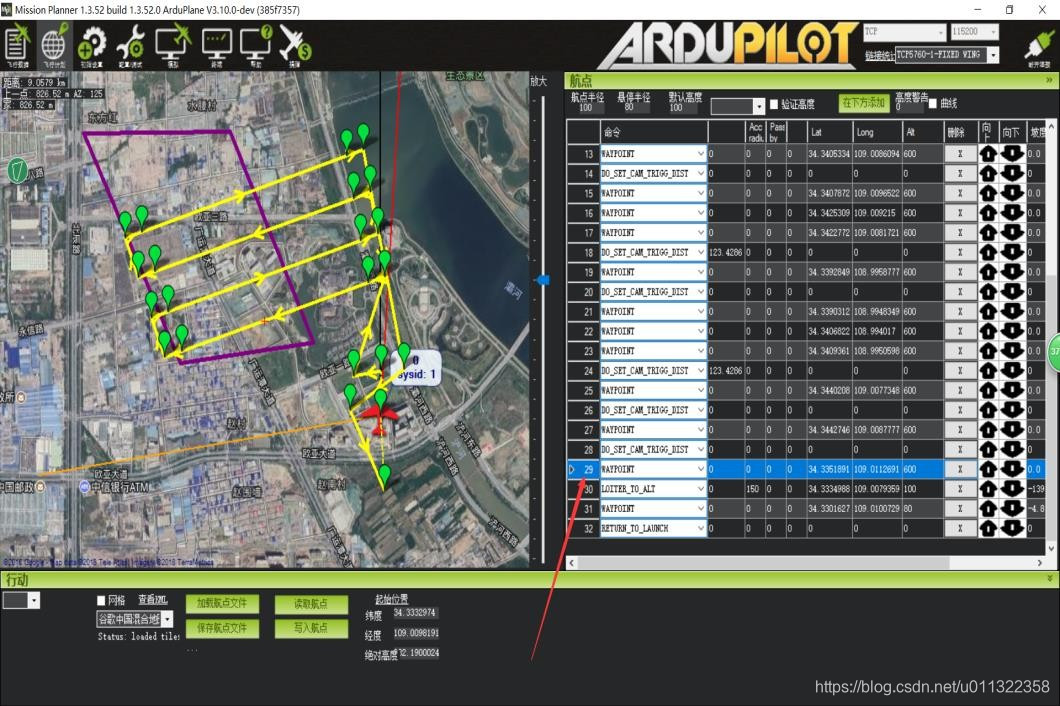
添加过度点:在家的附近添加航点,高度需和航向内高度一致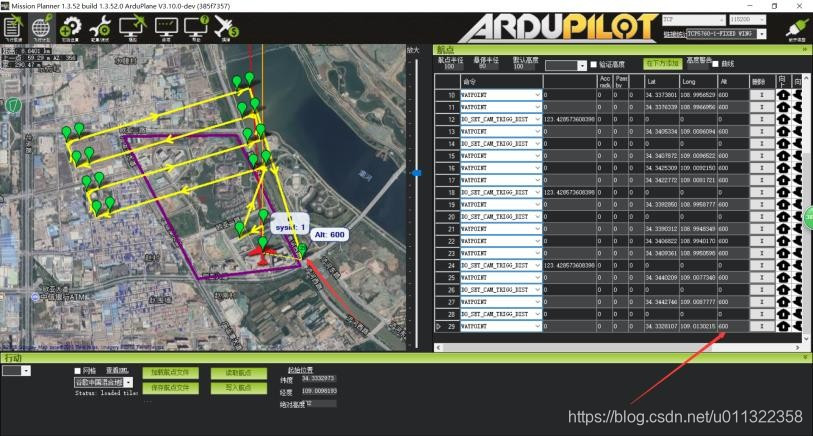 注意:此点是为了引导飞机以任务高度在确保安全的情况下进行返航,如果不添加此过度 点,飞机将会在返航的时候降高,这是非常危险的操作,请务必注意。 添加盘旋点:在空旷处添加航点,将命令改为 LOITER_TO_ALT(盘旋到高度)将 Radi
注意:此点是为了引导飞机以任务高度在确保安全的情况下进行返航,如果不添加此过度 点,飞机将会在返航的时候降高,这是非常危险的操作,请务必注意。 添加盘旋点:在空旷处添加航点,将命令改为 LOITER_TO_ALT(盘旋到高度)将 Radi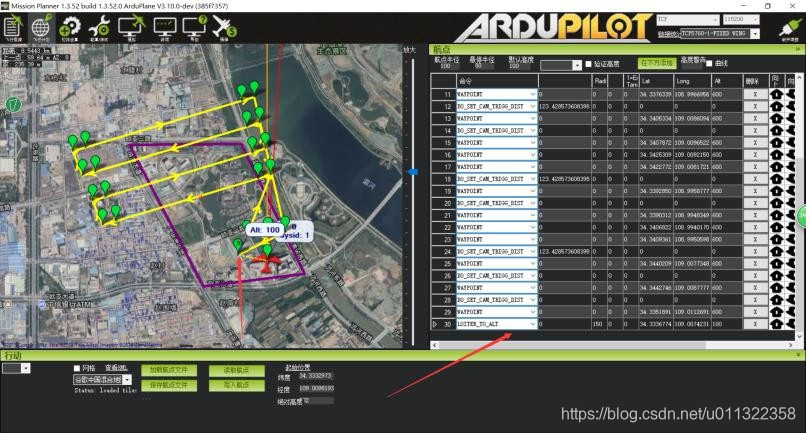 注意:设置盘旋点的时候应留给飞机足够的盘旋空间,如果条件不允许,可与盘旋上升点
注意:设置盘旋点的时候应留给飞机足够的盘旋空间,如果条件不允许,可与盘旋上升点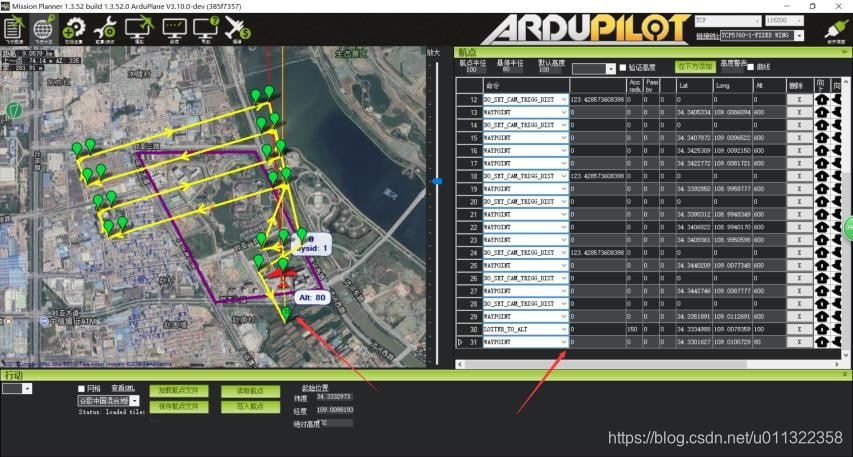 注意:我们希望飞机在起飞和降落的时候能遵循逆风起、逆风降的原则,而我们在准备的 时候就已经将机头朝向逆风方向,所以该引导点应该放到飞机正后方,如果条件不允许, 或风速较小,也可以将此点设置到其他位置,但请注意航线上应无建筑物遮挡,或高大树 木。
注意:我们希望飞机在起飞和降落的时候能遵循逆风起、逆风降的原则,而我们在准备的 时候就已经将机头朝向逆风方向,所以该引导点应该放到飞机正后方,如果条件不允许, 或风速较小,也可以将此点设置到其他位置,但请注意航线上应无建筑物遮挡,或高大树 木。 4.4 检查航线,请严格按照以上操作流程来检查航线与航点命令,确保作业安全。
4.4 检查航线,请严格按照以上操作流程来检查航线与航点命令,确保作业安全。 点击“保存航点文件”按钮,可将航线保存为文件,以便后期应用。
点击“保存航点文件”按钮,可将航线保存为文件,以便后期应用。 在空白处点击右键,点击清除任务,将任务清除
在空白处点击右键,点击清除任务,将任务清除 在点击“读取航线”按钮,从新读取航线,再次检查,以防航线未能正确写入。
在点击“读取航线”按钮,从新读取航线,再次检查,以防航线未能正确写入。
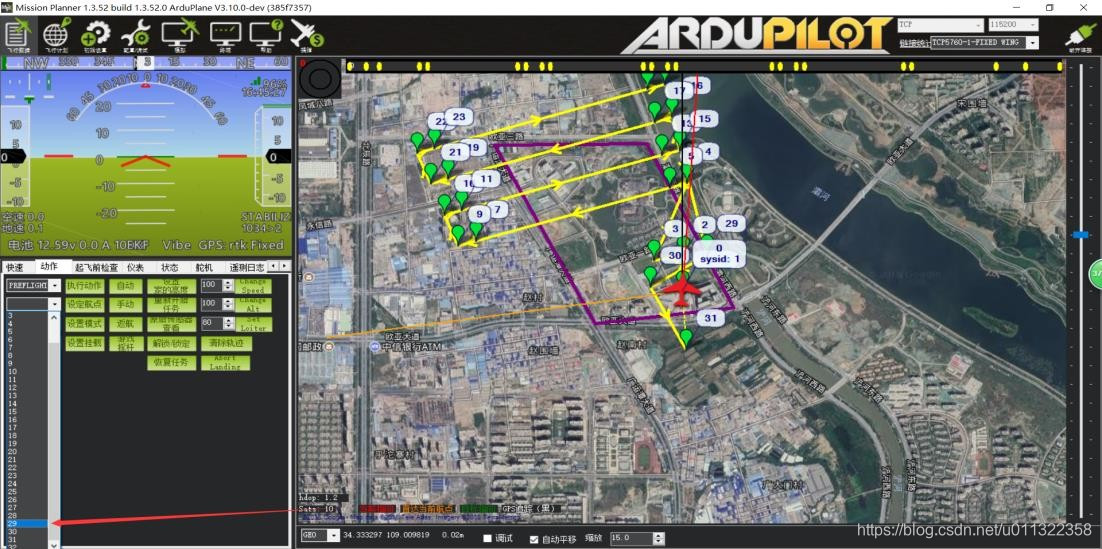
 在飞行数据动作里面选择该航点编号,并点击设置航点。
在飞行数据动作里面选择该航点编号,并点击设置航点。