原文档下载链接如下:
链接:https://pan.baidu.com/s/1bI0rW8hj7DJIx5N8qaZ-wQ
提取码:2zvx
虽然是非官方渠道,但是题目可信度非常之高,基本是2019年电赛巡线飞行器题目的延续,从巡线机器人到绕塔360度巡检基本是模拟实际电力巡检过程中的两大主要任何,一个是对电力线路的巡检、一个是对电线塔台的巡检,对去年的赛题进行了很好的传承与发挥。
2019年国赛巡线机器人B题
从赛题说明看2019年国赛和2020差别

2019国赛B题
枪版2020TI三个省赛D题
飞控类型没有明确限制,和2019年国赛标准一致,依据往届经验,肯定更推荐用TI芯片方案,对携带遥控器、无线数传等设备有可能造成的违规作弊行为予以严令禁止,有且进允许通过按键启动,这一点规定更加明确、清晰,避免去年国赛不同赛区对此要求认定模糊不清。
2020TI电赛绕障飞行器(D 题)
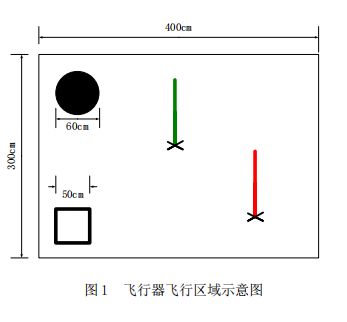
基于多悬翼飞行器设计一个绕障飞 行器(简称飞行器)。飞行器活动区域示 意图如图 1 所示。在图 1 中,地面上标有 起飞点与降落点,并且还放置了 2 个杆 塔;起飞点用空心黑色矩形框标识,降落 点实心黑色圆标识,杆塔有红、绿两种颜 色。
2.要求
(1) 飞行器从起飞地点垂直起飞升高到 150cm±10cm 的巡航高度。 (15 分)
(2) 巡航飞行中发现杆塔,以声音提示,并用与所发现杆塔相同颜色的 LED 闪烁 数次指示。 (20 分)
(3) 在巡航高度以杆塔为中心,绕所发现的杆塔抵近飞行一周(360°及以上);绕 飞时飞行器与杆塔最近点距离在 50±10cm;红色杆塔时飞行器沿顺时针方向(顶视)绕 飞,绿色杆塔时飞行器沿逆时针方向(顶视)绕飞。 (30 分)
(4) 飞行区域中所有杆塔均被发现并识别、绕飞后,寻找降落点标识缓慢平稳准确 地降落在降落区域内。 (10 分)
(5) 整个飞行过程用时不得超过 5 分钟,按用时计分,越快越好。 (15 分)
(6) 其他。 (10 分)
(7) 设计报告


三、说明
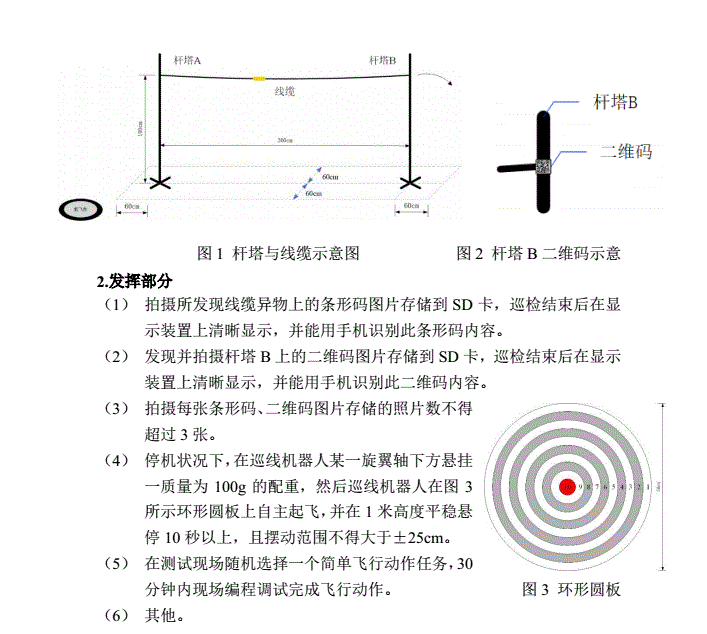
1. 杆塔说明
(1) 杆塔高度不低于 180cm,直径 3.5 cm±+0.5cm;
(2) 杆塔用红色或绿色喷涂或包裹,飞行区域中两个杆塔为一红一绿,;
(3) 杆塔可在飞行区域随意指定放置,杆塔间距离不小于 150cm。

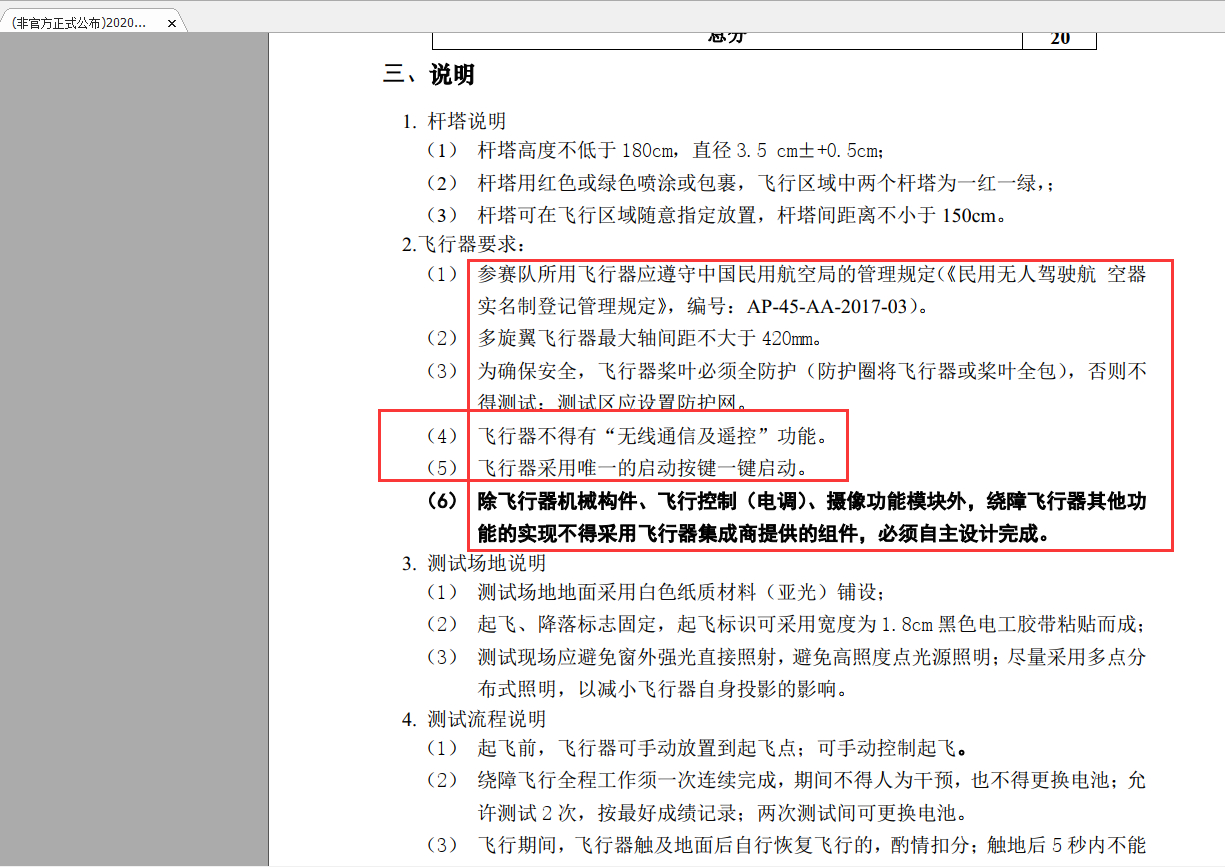
2.飞行器要求:
(1) 参赛队所用飞行器应遵守中国民用航空局的管理规定(《民用无人驾驶航 空器 实名制登记管理规定》,编号:AP-45-AA-2017-03)。
(2) 多旋翼飞行器最大轴间距不大于 420mm。
(3) 为确保安全,飞行器桨叶必须全防护(防护圈将飞行器或桨叶全包),否则不 得测试;测试区应设置防护网。
(4) 飞行器不得有“无线通信及遥控”功能。
(5) 飞行器采用唯一的启动按键一键启动。
(6) 除飞行器机械构件、飞行控制(电调)、摄像功能模块外,绕障飞行器其他功 能的实现不得采用飞行器集成商提供的组件,必须自主设计完成。
3. 测试场地说明
(1) 测试场地地面采用白色纸质材料(亚光)铺设;
(2) 起飞、降落标志固定,起飞标识可采用宽度为 1.8cm 黑色电工胶带粘贴而成;
(3) 测试现场应避免窗外强光直接照射,避免高照度点光源照明;尽量采用多点分 布式照明,以减小飞行器自身投影的影响。
4. 测试流程说明
(1) 起飞前,飞行器可手动放置到起飞点;可手动控制起飞。
(2) 绕障飞行全程工作须一次连续完成,期间不得人为干预,也不得更换电池;允 许测试 2 次,按最好成绩记录;两次测试间可更换电池。
(3) 飞行期间,飞行器触及地面后自行恢复飞行的,酌情扣分;触地后 5 秒内不能 自行恢复飞行视为失败,失败前完成动作仍计分。
(4) 平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等情况出现。 调试及测试时必须佩带防护眼镜,穿戴防护手套。
最后给出去年2019年参赛队员的经验总结好文链接(可能会对今年绕杆定位有帮助),
https://blog.csdn.net/xlazydog/article/details/99452860
包括
1、塔杆定点控制
2、巡线控制
3、绕杆控制
.......................

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)