文章目录
- 前言
- 一、rosbridge_suite元功能包
- 二、roslibjs、ros2djs、ros3djs功能包
- 三、tf2_web_republisher功能包
- 四、创建web应用
- 五、使用web浏览器控制机器人
前言
ROS Web tools社区开发了很多功能强大的web功能包。针对本篇文章,创建新的工作空间catkin_js_ws,并进行初始化等操作。
一、rosbridge_suite元功能包
rosbridge_suite功能包用于完成web浏览器和ROS之间的数据交互,是一种中间件,屏蔽了ROS中复杂的算法、接口、消息传递机制等,使用socket序列化协议为机器人应用提供更为简单的接口。
rosbridge_suite允许使用html5 web sockets或者标准的posix ip sockets进行ros的消息传送。
安装,命令如下:
sudo apt-get install ros-kinetic-rosbridge-suite
该元功能包包含如下三个功能包:
- rosbridge_library:提供ROS消息与JSON消息之间转换的python API
- rosbridge_server:提供websocket服务
- rosapi:通过服务调用来获取ROS中的Topic和Parameters
二、roslibjs、ros2djs、ros3djs功能包
ROS web tools开发了一系列rosbridge的客户端功能包,可以通过web浏览器发送JSON命令,在不同场景中实现ROS丰富的功能。
- roslibjs:实现了ROS中的部分功能,例如Topic、Server、actionlib、TF、URDF等。
- ros2djs:在roslibjs的基础上提供二维可视化管理工具,例如在web浏览器中可视化显示二维地图。
- ros3djs:提供三维可视化工具,可以基于web创建一个rviz实例,三维显示URDF、TF等信息。
这三个功能包需要通过源码编译的方式进行安装,命令如下:
git clone https://github.com/RobotWebTools/roslibjs.git
git clone https://github.com/RobotWebTools/ros2djs.git
git clone https://github.com/RobotWebTools/ros3djs.git
下载源码到catkin_ws工作空间,即可使用catkin_make命令进行编译。
三、tf2_web_republisher功能包
该功能包可以计算TF数据,并且发送到ros3djs客户端,实现机器人的运动。
需要通过源码编译的方式进行安装,命令如下:
sudo apt-get install ros-kinetic-tf2-ros
git clone https://github.com/RobotWebTools/tf2_web_republisher
工作空间src目录,如图所示:
然后执行编译命令,编译成功,如下:
四、创建web应用
功能描述:通过web远程控制机器人运动,并且显示机器人的三维模型。
实现原理:使用keyboardteleopjs功能包,通过JavaScript实现浏览器中对键盘按键的识别,并且发布Twist消息。Twist消息会由rosbridge的客户端使用JSON命令通过web sockets发送到服务器,然后服务器负责解析消息,通过controller控制机器人移动。而tf2_web_republisher会将机器人的TF数据通过rosbridge发送到客户端,在ros3djs的可视化显示中更新机器人状态。
创建功能包web_gui,创建keyboardteleop.html文件,代码如下:
<!DOCTYPE html>
<html>
<head>
<meta charset="UTF-8">
<script type="text/javascript" src="http://code.jquery.com/jquery-latest.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-3.5.1.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-3.5.1.min.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-3.5.1.slim.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-3.5.1.slim.min.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-1.12.4.js"></script>
<script type="text/javascript" src="http://code.jquery.com/jquery-1.12.4.min.js"></script>
<script src="http://code.jquery.com/ui/1.12.1/jquery-ui.js"></script>
<script src="http://code.jquery.com/ui/1.12.1/jquery-ui.min.js"></script>
<link rel="stylesheet" href="http://code.jquery.com/ui/1.12.1/themes/base/jquery-ui.css">
<link rel="stylesheet" href="http://code.jquery.com/ui/1.12.1/themes/blitzer/jquery-ui.css">
<link rel="stylesheet" href="http://code.jquery.com/ui/1.11.4/themes/cupertino/jquery-ui.css">
<script src="https://static.robotwebtools.org/EventEmitter2/current/eventemitter2.min.js"></script>
<script src="https://static.robotwebtools.org/roslibjs/current/roslib.js"></script>
<script src="/home/zt/catkin_js_ws/src/ros3djs/build/ros3d.js"></script>
<script src="/home/zt/catkin_js_ws/src/ros3djs/build/ros3d.min.js"></script>
<script src="/home/zt/catkin_js_ws/src/web_gui/build/keyboardteleop.js"></script>
<script>
/**
* Setup all GUI elements when the page is loaded.
*/
var teleop_topic = '/cmd_vel'
var base_frame = 'odom';
var init_flag = false
function submit_values(){
teleop_topic = document.getElementById("tele_topic").value;
base_frame = document.getElementById("base_frame_name").value;
init_flag = true;
init();
}
function init() {
if(init_flag == true)
{
// Connecting to ROS.
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
// Initialize the teleop.
var teleop = new KEYBOARDTELEOP.Teleop({
ros : ros,
topic : teleop_topic
});
////////////////////////////////////////////////////////////////////////////////////////////////////////
var viewer = new ROS3D.Viewer({
background : 000,
divID : 'urdf',
width : 1280,
height : 600,
antialias : true
});
// Add a grid.
viewer.addObject(new ROS3D.Grid());
// Setup a client to listen to TFs.
var tfClient = new ROSLIB.TFClient({
ros : ros,
fixedFrame : base_frame,
angularThres : 0.01,
transThres : 0.01,
rate : 10.0
});
// Setup the URDF client.
var urdfClient = new ROS3D.UrdfClient({
ros : ros,
tfClient : tfClient,
path : 'http://resources.robotwebtools.org/',
rootObject : viewer.scene,
loader : ROS3D.COLLADA_LOADER
});
///////////////////////////////////////////////////////////////////////////////////////////////////
// Create a UI slider using JQuery UI.
$('#speed-slider').slider({
range : 'min',
min : 0,
max : 100,
value : 90,
slide : function(event, ui) {
// Change the speed label.
$('#speed-label').html('Speed: ' + ui.value + '%');
// Scale the speed.
teleop.scale = (ui.value / 100.0);
}
});
// Set the initial speed .
$('#speed-label').html('Speed: ' + ($('#speed-slider').slider('value')) + '%');
teleop.scale = ($('#speed-slider').slider('value') / 100.0);
init_flag = false;
}
}
</script>
</head>
<body onload="init()">
<h1>Web-browser keyboard teleoperation</h1>
<form >
Teleop topic:<br>
<input type="text" name="Teleop Topic" id='tele_topic' value="/cmd_vel">
<br>
Base frame:<br>
<input type="text" name="Base frame" id='base_frame_name' value="/odom">
<br>
<input type="button" onmousedown="submit_values()" value="Submit">
</form>
<p>Run the following commands in the terminal then refresh this page. Check the JavaScript
console for the output.</p>
<ol>
<li><tt>roslaunch mrobot_gazebo view_mrobot_with_kinect_gazebo.launch </tt></li>
<li><tt>rosrun tf2_web_republisher tf2_web_republisher </tt></li>
<li><tt>roslaunch rosbridge_server rosbridge_websocket.launch</tt></li>
<li>Use WASD on your keyboard to move the robot (must have this browser window focused).</li>
</ol>
<div id="speed-label"></div>
<div id="speed-slider"></div>
<div id="urdf"></div>
</body>
</html>
关键代码解释如下:
var ros = new ROSLIB.Ros({
url : 'ws://localhost:9090'
});
创建一个ROSLIB.Ros对象用于连接rosbridge_server,如果rosbridge_server位于本机,IP使用localhost,否则需要修改为相应的IP地址。
var teleop = new KEYBOARDTELEOP.Teleop({
ros : ros,
topic : teleop_topic
});
创建一个KEYBOARDTELEOP.Teleop对象,用来识别键盘按键并且发布消息,发布的话题通过变量teleop_topic设置,也就是”/cmd_vel“,设置了ROS的节点对象ros。
var viewer = new ROS3D.Viewer({
background : 000,
divID : 'urdf',
width : 1280,
height : 600,
antialias : true
});
viewer.addObject(new ROS3D.Grid());
创建一个ROS3D.Viewer的可视化对象,用于显示机器人的URDF模型,同时设置了可视化区域的分辨率尺寸,还通过addObject方法在可视化区域中添加了背景网格。
var tfClient = new ROSLIB.TFClient({
ros : ros,
fixedFrame : base_frame,
angularThres : 0.01,
transThres : 0.01,
rate : 10.0
});
创建一个TF客户端,订阅tf2_web_republisher功能包发布的TF数据,更新可视化对象中的机器人状态。其中有一个似曾相识的参数——fixedFrame,与rviz中的属性相同。
var urdfClient = new ROS3D.UrdfClient({
ros : ros,
tfClient : tfClient,
path : 'http://resources.robotwebtools.org/',
rootObject : viewer.scene,
loader : ROS3D.COLLADA_LOADER
});
创建一个URDF客户端,加载机器人模型,设置ROS节点、TF客户端模型加载路径,使用ROS3D.COLLADA_LOADER加载器,通过ROS中的robot_description参数将模型加载到COLLADA文件中。
$('#speed-slider').slider({
range : 'min',
min : 0,
max : 100,
value : 90,
slide : function(event, ui) {
// Change the speed label.
$('#speed-label').html('Speed: ' + ui.value + '%');
// Scale the speed.
teleop.scale = (ui.value / 100.0);
}
});
// Set the initial speed .
$('#speed-label').html('Speed: ' + ($('#speed-slider').slider('value')) + '%');
teleop.scale = ($('#speed-slider').slider('value') / 100.0);
创建一个滑动条,控制机器人的速度大小。
<form >
Teleop topic:<br>
<input type="text" name="Teleop Topic" id='tele_topic' value="/cmd_vel">
<br>
Base frame:<br>
<input type="text" name="Base frame" id='base_frame_name' value="/odom">
<br>
<input type="button" onmousedown="submit_values()" value="Submit">
</form>
创建两个输入框,用于设置速度控制的话题名和基坐标系名,创建确认按钮,点击后会提交输入框的表单,修改程序中的变量值。
五、使用web浏览器控制机器人
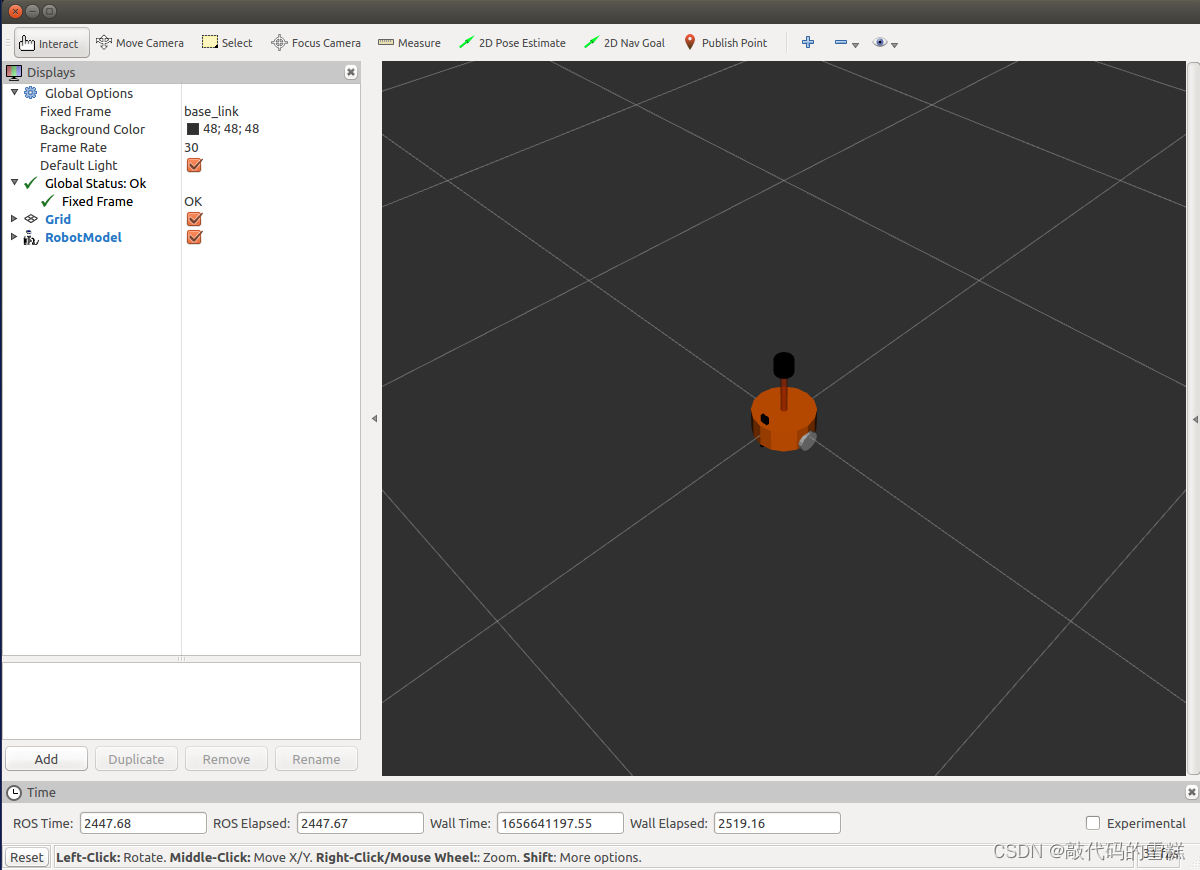
这里使用之前自定义的机器人模型,启动机器人模型,命令如下:
roslaunch robot_sim_gazebo robot.launch
启动成功,RVIZ效果如下:
gazebo效果如下:

仿真器启动成功后,就可以启动tf2_web_republisher和rosbridge_server了,命令如下:
rosrun tf2_web_republisher tf2_web_republisher
roslaunch rosbridge_server rosbridge_websocket.launch
现在,服务器的节点全部启动成功。以网页的形式打开keyboardteleop.html,效果如下:
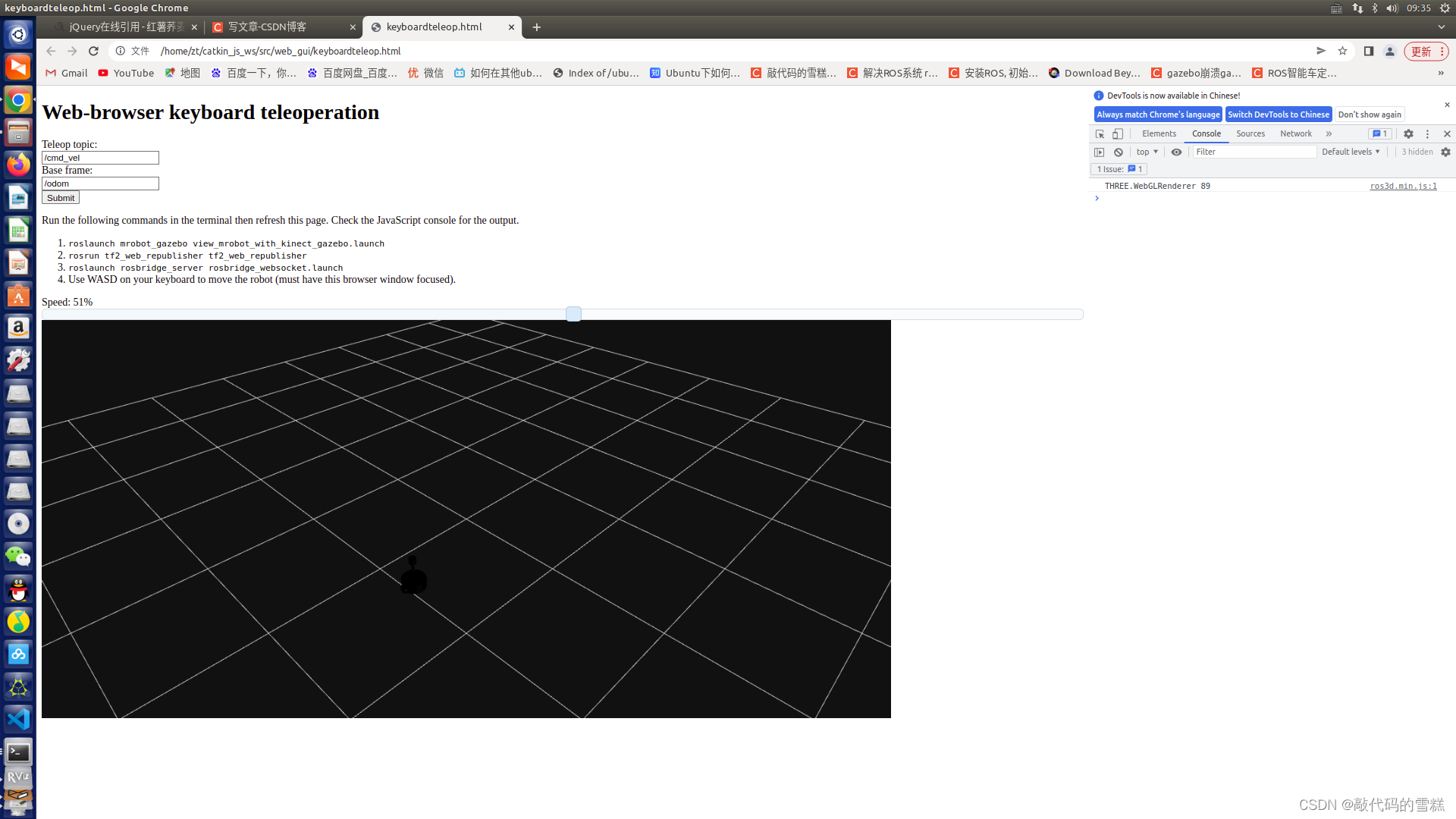
点击submit按钮后,下方会出现速度滑动条和三维可视化界面,机器人很快就在界面中加载出现,类似于RVIZ中的可视化区域。
如果要使用键盘按键控制机器人的移动,请确保鼠标点在网页上。然后我们就可以使用键盘上的W、A、S、D键控制gazebo仿真器中的机器人前后左右移动,web浏览器中的机器人状态也会更新。
在以后的学习中,还可以基于web功能包实现web浏览器中的SLAM、导航、语音控制等复杂功能。http://robotwebtools.org/这个网站上提供了很多库用来开发和ROS相关的web应用。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)