Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
国内外开源飞控简介
2023-05-16
国内外开源飞控简介——无名创新
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
国内外开源飞控简介 的相关文章
Arm Keil MDK v5.30版本官宣,快来下载!
近日 xff0c Arm很高兴地宣布发布Arm Keil MDK v5 30 此版本新增了对Cortex M55处理器和CMSIS Build的支持 xff0c 更新包括Arm Compiler 6 14 xff0c CMSIS 5 7 0
ubuntu下访问串口
前言 最近准备将windows上自动瞄准的程序移植到linux xff0c 第一步准备调试一下ubuntu下的串口 在网上搜到一个串口库 xff0c 于是就拿来调用 xff0c 最后调试成功 过程如下 xff1a 过程 1 下载Serial
热备笔记实验
早上突然断电 本来笔记本的插头就忘记插了 xff0c 电池没用多久就熄火 最纳闷的是接入电源后本机数据库竟然挂掉了 xff0c 嘿嘿 xff0c 正好试一试前几天应用的热备回复 以下是我的全程 C Documents and Setting
Android学习之AIDL添加Service权限
参考 Android开发艺术探索 xff0c 书中提供了两种方法 第一种方法 xff1a 在onBind中验证 在服务端的AndroidManifest添加自定义权限 lt permission android name 61 span c
ADRC(自抗扰控制器)技术附Matlab代码框架
自抗扰控制器 Auto Active Disturbances Rejec ion Controller ADRC 是韩京清学者提出的 xff0c 是一种继PID控制器后的一种新型的实用的控制技术 它不是一种独立的技术 xff0c 可以理解
git视频及对初学者的学习建议
http herry2013git blog 163 com blog static 21956801120144810133569 http herry2013git blog 163 com blog static 2195680112
迷你光流使用说明
为了让你有兴趣往下学习 xff0c 先上个定点悬停效果视频给你欣赏一下吧 xff01 点击打开视频链接 首先 xff0c 简单介绍一下我使用的这款光流传感器 长宽高 xff1a 14x11x5mm xff0c 重量约0 6克 xff0c 工
Handler的使用方法(一)
想花点时间谈谈Handler的使用方法 xff0c 是应为Handler的使用涉及到了线程类的使用 xff0c 也是在程序中用到了线程 xff0c 关于线程 xff0c 是个很重要的概念 xff0c 因为以后的嵌入式系统的应用开发往往在程序
STM32控制APM飞控(二)MAVLINK源码集成到stm32工程中
MAVLINK协议源码集成到32工程中 一 MAVLINK代码转化为C语言源码文件 主要根据 http www cnblogs com lovechen p 5801679 html 作者 恒久力行 的方式 xff0c 我进行归纳简要说明
STM32控制APM飞控(三)MAVLINK整合并适配stm32串口的收发
目录 stm32底层串口代码更改能收发MAVLINK协议包 一 在上一次移植好的工程基础上进行如下改动
STM32控制APM飞控(五)MAVLINK的C源码的解释及MAVLINK心跳包
MAVLINK的C源码的解释及MAVLINK心跳包 一 MAVLINK转化成C源码后的文件及文件夹解释 用pathon2 7将从github官网下载下来的MAVLINK源码转换成c语言源码的文件夹如图 xff1a 解释 xff1a a xf
(一) 概述(概念、组件、架构、适用场景) | 普罗米修斯(Prometheus)
什么是普罗米修斯 xff1f Prometheus是一个开源系统监控和警报工具包 xff0c 最初在 SoundCloud构建 自 2012 年成立以来 xff0c 许多公司和组织都采用了 Prometheus xff0c 该项目拥有非常活
多值依赖
多值依赖 xff1a 比如 xff1a 学校中某一门课程由多个教员讲授 xff0c 他们使用相同的一套参考书 每个教员可以讲授多门课程 xff0c 每种参考书可以供多门课程使用 我们可以用一个非规范化的关系来表示教员T 课程C 和参考书B
Docker启动Mysql问题汇总
最近在学习Docker技术 xff0c 遇到了不少问题 xff0c 记录分享一下 xff0c 感觉有用的可以参考一下 xff1b 1 Docker使用Mysql docker run d v opt data mysql02 var lib
静态库和动态库/文件描述符与文件指针/文件操作/重定向
c语言阶段学习文件操作复习 1 打开文件 FILE fopen const char path const char mode path xff1a 需要打开的文件路径 xff0c 可以是绝对路径 xff0c 也可以是相对路径 mode x
一种可行的STM32F103外设RTC使用方法
前言 最近做的项目需要用RTC功能 xff0c 记录掉上电时间 然后就开始琢磨STM32的RTC 在使用的过程中出现各种问题 搞的很是头痛 几经折腾 xff0c 终于弄出一种稳定的使用方法 刚开始最大的问题就是掉电后时钟不走 xff0c 代
路径规划算法初探
前言 xff1a 真实世界中人类的路径规划是对记忆信息和实时感知信息综合分析的过程 xff0c 在虚拟技术中属于行为控制层级的技术 一 xff0c 机器人路径规划分类 xff1a 1 全局路径规划 xff08 环境完全已知 xff09 2
docker容器的备份和恢复
将容器保存为镜像 root 64 1 0001 docker ps a CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES a40d46499c3a gitlab gitlab ce
无名创新飞控开源地面站软件NGroundStation源码发布说明
无名创新飞控开源地面站 NGroundStation 一 地面站开源初衷与下载链接 xff1a 无名创新飞控开源飞控地面站是无名小哥为广大自研飞控开发者 电子发烧友们专门开发的一款多功能上位机软件 xff0c 地面站功能涵盖 xff1a 飞
(枪版非官方正式发布)2020 年TI 杯大学生电子设计竞赛——绕障飞行器(D 题)
原文档下载链接如下 xff1a 链接 xff1a https pan baidu com s 1bI0rW8hj7DJIx5N8qaZ wQ 提取码 xff1a 2zvx 虽然是非官方渠道 xff0c 但是题目可信度非常之高 xff0c 基
随机推荐
无名创新开源飞控利用GPS数据航向对准开源代码
无名创新开源飞控利用GPS数据航向对准开源代码 xff1a define acc sync cnt 5 void GPS Azimuth Update Method1 uint8 t flag if flag 61 61 0 return
六、MSP432飞控软件框架分析
飞控整个软件代码运行在定时器调度模式 xff0c 同时对各个外设模块中断优先级进行了合理设计 xff0c 确保程序运行的实时性和稳健性 其中对实时性 周期性要求高的比如 xff1a 传感器数据采集 姿态解算 惯性导航 控制等任务 xff0c
一、电赛TI官方LaunchPad板飞行器MSP432飞控无人机硬件相关的模块介绍
1 飞控 飞控的功能 xff1a 实时获取无人机必要的导航信息 xff0c 包括水平位置 速度 加速度 姿态角 角速度 运动航向等反馈数据 xff0c 接收遥控器或者数传控制指令 xff0c 实时控制无人机的飞行的位置 速度 姿态等状态 x
都2021年了,你还在考虑电赛飞行器赛题,备赛是否有必要用基于TI处理芯片的飞控问题?
无名创新售后群问题节选 64 无名小哥 能问下今年国赛会不会指定某一款飞控呀 xff1f 答 xff1a 都2021年了 xff0c 你还在考虑电赛飞行器赛题备赛是否有必要用基于TI处理芯片的飞控问题 xff1f 暂不论官方是否会限定TI芯
树莓派4B+ROS+RealSense T265室内定位替代光流开源方案
硬件机载端 xff1a 树莓派4B 4 8G T265 RPLIDAR A2 配套开发环境 xff1a 树莓派系统Ubuntu 20 04 3 LTS RealSense SDK 2 0 ROS系统版本 xff1a noetic 43 re
解决MATLAB帮助文档打不开的情况
解决MATLAB帮助文档打不开的情况 问题描述 今天在MATLAB命令行窗口中输入 doc find xff0c 出现了帮助文档打不开的情况 如图1所示 图1 帮助文档打不开 解决办法 在MATLAB的 主页 中点击 预设 如图2所示 图2
2_竞赛无人机基础飞行控制函数——零基础学习竞赛无人机搭积木式编程
竞赛无人机基础飞行控制函数 无人机的在空中的基本飞行包括姿态控制 xff08 角度 角速度 xff09 与高度控制 xff08 位置 速度 加速度 xff09 两个部分 姿态控制是无人机按照飞行控制指令姿态保持水平或者以某一倾斜角度飞行 x
3_竞赛无人机激光雷达SLAM建图条件下的室内定点控制——零基础学习竞赛无人机搭积木式编程
根据上一节讲的仅依靠姿态自稳在角度层面的控制 xff0c 无法避免无人机水平位置发生偏移 xff0c 需要在姿态控制的基础上 xff0c 额外增加水平位置 速度控制器去实现无人机的定点控制 xff0c 其中位置 速度控制器的输出结果为期望运
飞控学习常见典型问题集Q&A——无名创新(2022年4月15日)
飞控学习常见典型问题集Q amp A 无名创新 xff08 2022年4月15日 xff09 1 第一次启动FS I6遥控器 xff0c 进入不了界面一直嘟嘟 xff0c 请问这是什么情况呢 xff1f 先把上面的英文翻译一下 xff0c
6_树莓派机载计算机通过串口指令控制无人机自主飞行教程
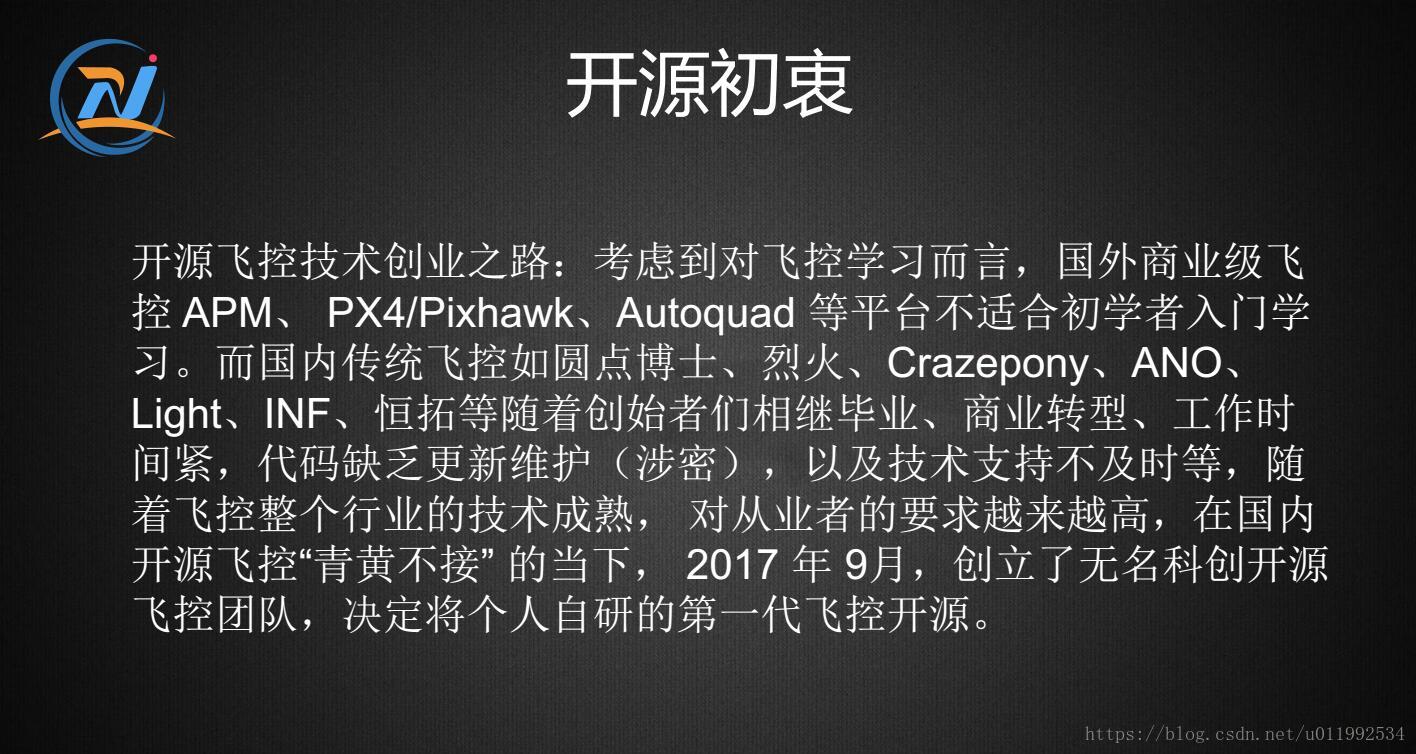
typora root url img 6 树莓派机载计算机通过串口指令控制无人机自主飞行教程 电赛飞行器赛题的前世今生 飞行器赛题至出现以来 从大体趋势上来看参赛学生的主流飞控路线主要经历了以下四个发展阶段 xff1a APM Pixha
无名创新TIVA LaunchPad V2版本飞控代码阶段性更新日志
TIVA LaunchPad V2版本飞控代码阶段性更新日志 xff1a 20220430主要更新如下 1 增加了飞控串口直接解析2D激光雷达传感器数据 OLED激光雷达点云数据显示 xff0c 方便后续处理避障 绕障飞行 2 增加了飞控端
喜报丨武汉无名创新科技有限公司荣获国家“高新技术企业”证书,将助力高校科研与竞赛无人机产业加速发展!
2022年11月03日 xff0c 高新技术企业认定管理官网公告了湖北省2022年第一批通过认定的高新技术企业名单 xff0c 武汉无名创新科技有限公司 xff08 简称 无名创新 xff09 榜上有名 xff0c 证书编号为GR20224
B题-具有自动泊车功能的电动车赛题解析TI杯2022年省级大学生电子设计竞赛联赛(10月)
1 赛题解析 具有自动泊车功能的电动车 xff08 B题 xff09 2 完成本赛题必备的元器件清单 3 赛题实现与动作分解视频演示 4 任务实现软件部分讲解 5 倒车 侧方入库相关的参数调节方法 6 常见问题整理 无名小哥 2023年3月
竞赛无人机搭积木式编程——以2022年TI电赛送货无人机一等奖复现为例学习(7月B题)
在学习本教程前 xff0c 请确保已经学习了前4讲中无人机相关坐标系知识 基础飞行控制函数 激光雷达SLAM定位条件下的室内定点控制 自动飞行支持函数 导航控制函数等入门阶段的先导教程 同时用户在做二次开发自定义的飞行任务时 xff0c 可
球上自平衡全向移动机器人控制系统
球上自平衡全向移动机器人控制系统
智能车竞赛平衡组三种滤波方案
三种滤波函数 xff0c 每种都调试下 xff0c 比较动态和静态过程 下面滤波过程很重要 xff0c 很重要 xff0c 很重要 xff0c 重要的事情说三遍 下面滤波过程很重要 xff0c 很重要 xff0c 很重要 xff0c 重要的
重新下载PX4固件,导致符号链接创建失败的问题
重新下载PX4 Autopilot固件代码后 xff0c 运行 roslaunch px4 mavros posix sitl launch 结果出现了下面的不能创建符号链接的错误 Error creating symlink home c
四旋翼定高篇之惯导加速度+速度+位置三阶互补融合方案
笔者最近正在做四旋翼惯性导航的部分 xff0c 利用加速度计进行速度估计 位置估计 xff0c 从而实现四旋翼的垂直方向上的定高 水平方向上的定点控制 首先在这里引用学长之前参考APM飞控里面互补滤波惯导融合方案 xff1a 原文见四旋翼位
四旋翼惯导融合之观测传感器滞后问题汇总与巴特沃斯低通滤波器设计(气压计MS5611、GPS模块M8N、超声波、PX4FLOW等)
前文讲到APM的三阶互补方案 xff0c 之前附的图是从学长博客里面抠的 xff0c 感觉还不是很详细 xff0c 于是自己就画了下 xff0c 顺便重新理一下思路 上图中下标为O的表示原始量 xff08 Origion xff09 C表示
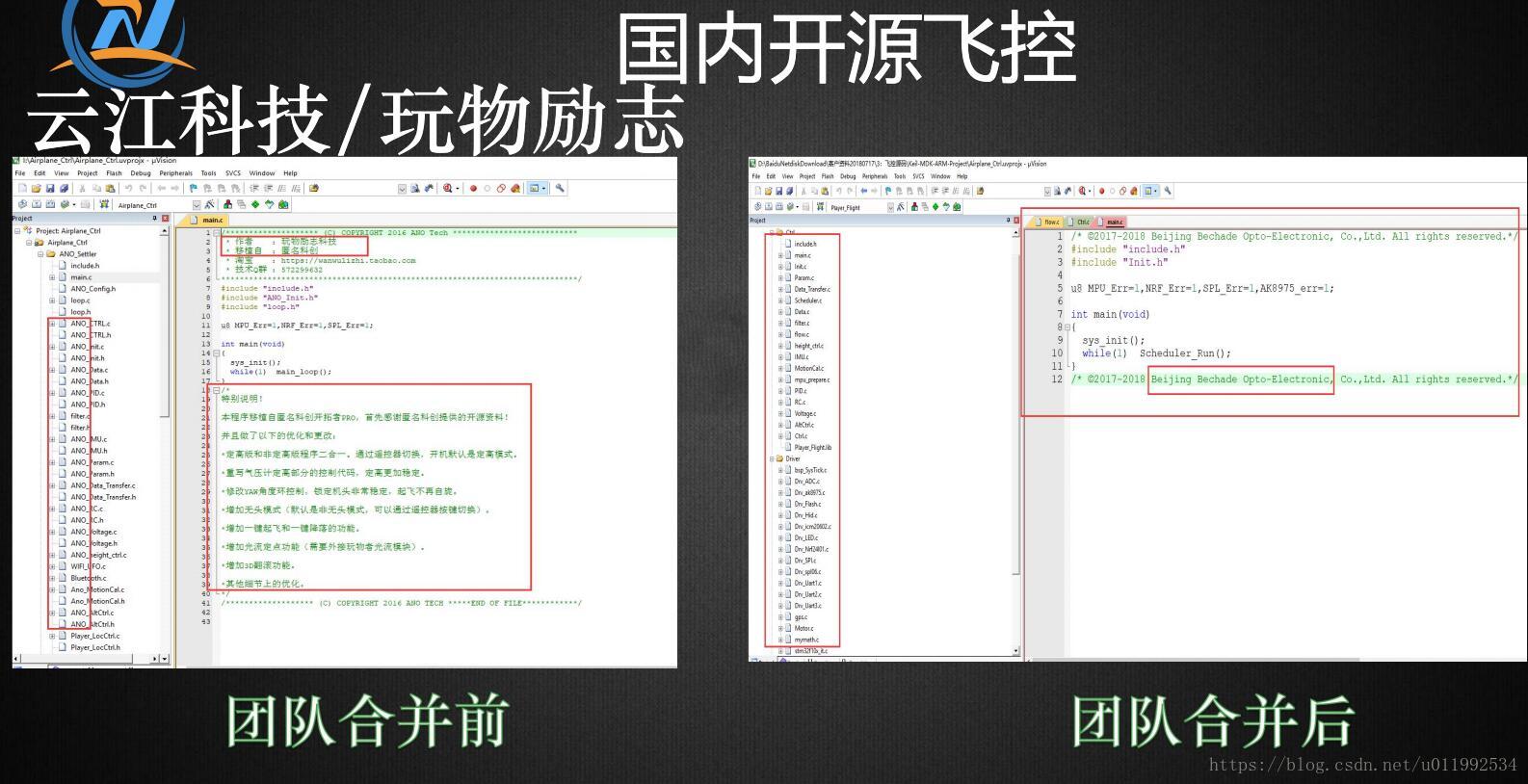
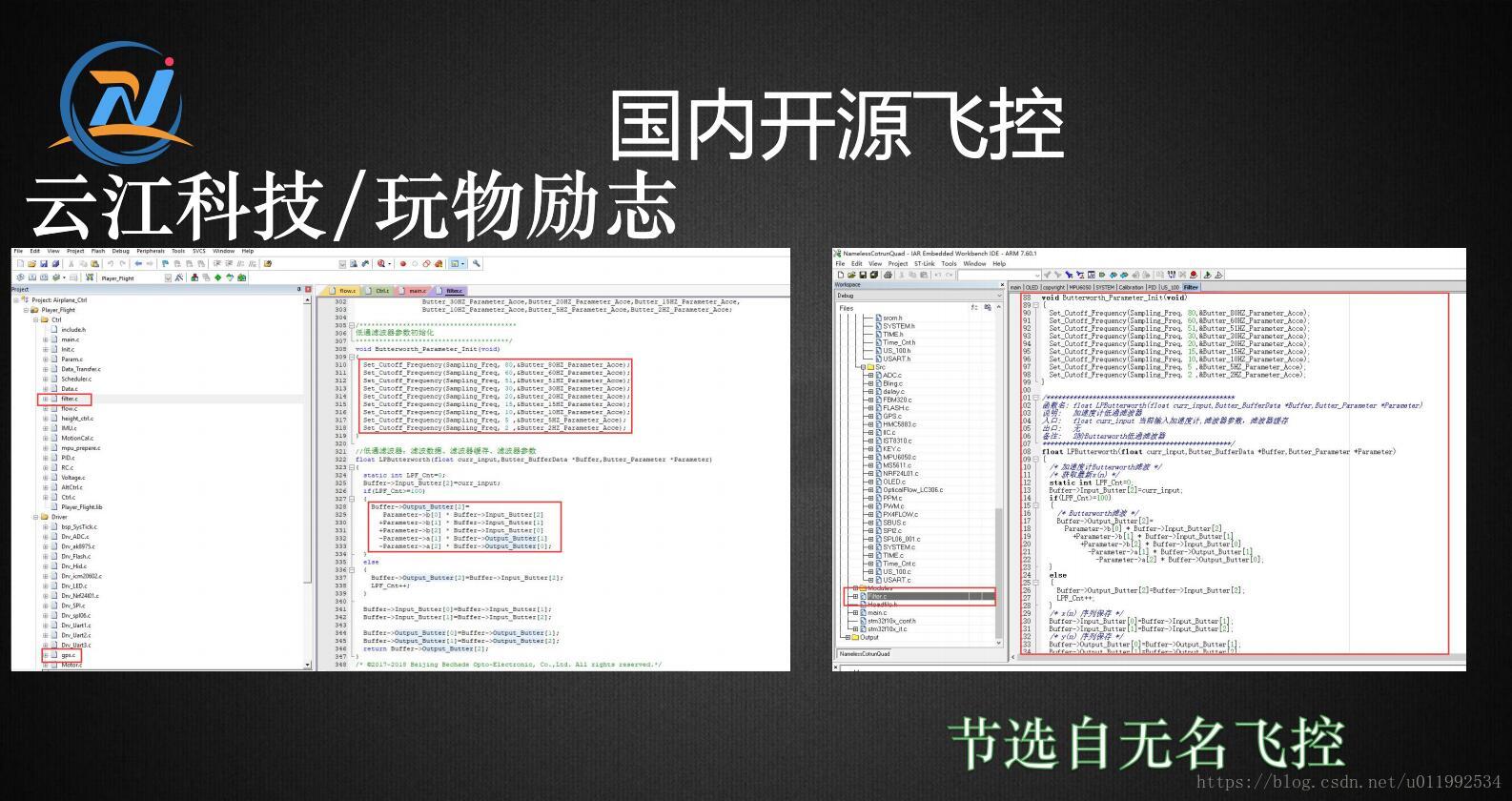
国内外开源飞控简介
国内外开源飞控简介 无名创新
热门标签
template10
joomla15
boilerpipe
sqlfiddle
howlerjs
rgeo
clipping
messageid
secretkey
lync
genstrings
dictating
accordnet
csvtools
mongooseim