Arduino是许多智能硬件爱好者的首选,使用简单快捷,而ESP8266模块也是当前最为热门的WIFI模块。本项目完成了Arduino使用EDP协议通过ESP8266 WIFI模块接入OneNET服务器,并通过在接入设备中创建的应用来实现远程控制LED灯。
【1】硬件连接:
准备元件:
- Arduino UNO
- ESP8266 WIFI模块
- USB转TTL连接线
硬件连线:
Arduino UNO USB转TTL
D2-----------------RX
D3-----------------TX
GND---------------GND
Arduino UNO ESP8266
RX-----------------TX
TX-----------------RX
GND---------------GND
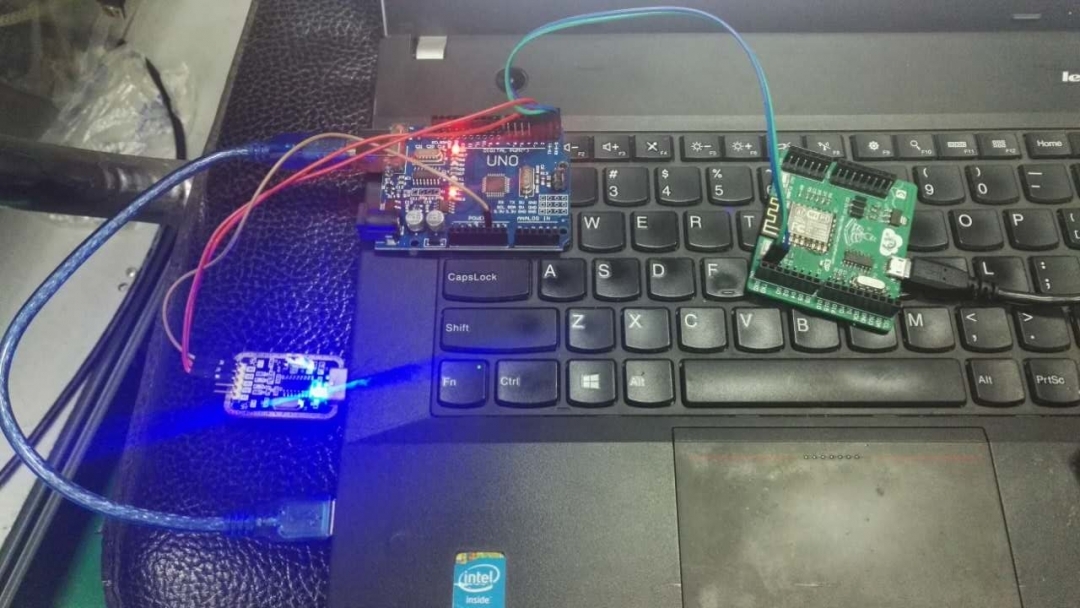
其中USB转TTL连接电脑用于调试打印输出,然后Arduino的串口连接ESP8266的串口。
实物连接如下如图所示:
【2】ESP8266配置和EDP上传数据介绍:
选用ESP8266串口WIFI模块,通过AT指令控制WIFI模块接入互联网,依次完成与接入互联网、与OneNet服务器建立TCP连接、传输数据等操作。
1)配置WIFI模块;
模块配置接入OneNet,依次发送如下几个命令到WIFI模块:
AT+CWMODE=3
AT+RST
AT+CIFSR
AT+CWJAP="your ssid","password"
2)和OneNet服务器建立TCP连接,依次发送命令:
AT+CIPSTART="TCP","183.230.40.39",876 //和服务器建立TCP连接
AT+CIPMODE=1 //进入透明传输模式
AT+CIPSEND //开始传输
命令执行结果如下图所示:
关于如何使用WIFI方式接入可以详细查看:『OneNET设备云平台』云平台对接服务_智能设备
【3】创建设备和应用:
添加产品并创建接入设备,详细创建步骤请查看:『OneNET设备云平台』云平台对接服务_智能设备。其中数据传输协议选择EDP。
在设备中添加应用,创建一个开关控件,在右侧的属性中选择对应设备的switch0数据流 ·注意到属性中有开关开值和开关关值两个属性,分别默认为1,0,这里不做修改(因为代码中1为开,非1则为关) ·修改EDP命令内容为switch0:{v}(与代码对应,代码中会将冒号前的部分作为上传的数据流ID,而将冒号之后的部分作为上传是数据值) 这里的{v}是通配符当下发命令的时候,他将会被开关的开/关值取代,稍后我们将看到命令的内容。
编辑完成后点击保存应用。
【4】软件代码:
其中Arduino开发板的D13作为被控制的LED灯,在程序中添加设备ID和APIKey。
复制
[code]/*
采用外接电源单独供电,2 3口作为软串口接PC机作为调试端
1 0为串口,连接WIFI模块
*/
#include <SoftwareSerial.h>
#include "edp.c"
#define KEY "XpAhYrqhsZbk9eVqESnMJznDb3A=" //APIkey
#define ID "4051313" //设备ID
//#define PUSH_ID "680788"
#define PUSH_ID NULL
// 串口
#define _baudrate 115200
#define _rxpin 3
#define _txpin 2
#define WIFI_UART Serial
#define DBG_UART dbgSerial //调试打印串口
SoftwareSerial dbgSerial( _rxpin, _txpin ); // 软串口,调试打印
edp_pkt *pkt;
/*
* doCmdOk
* 发送命令至模块,从回复中获取期待的关键字
* keyword: 所期待的关键字
* 成功找到关键字返回true,否则返回false
*/
bool doCmdOk(String data, char *keyword)
{
bool result = false;
if (data != "") //对于tcp连接命令,直接等待第二次回复
{
WIFI_UART.println(data); //发送AT指令
DBG_UART.print("SEND: ");
DBG_UART.println(data);
}
if (data == "AT") //检查模块存在
delay(2000);
else
while (!WIFI_UART.available()); // 等待模块回复
delay(200);
if (WIFI_UART.find(keyword)) //返回值判断
{
DBG_UART.println("do cmd OK");
result = true;
}
else
{
DBG_UART.println("do cmd ERROR");
result = false;
}
while (WIFI_UART.available()) WIFI_UART.read(); //清空串口接收缓存
delay(500); //指令时间间隔
return result;
}
void setup()
{
char buf[100] = {0};
int tmp;
pinMode(13, OUTPUT); //WIFI模块指示灯
pinMode(8, OUTPUT); //用于连接EDP控制的发光二极管
WIFI_UART.begin( _baudrate );
DBG_UART.begin( _baudrate );
WIFI_UART.setTimeout(3000); //设置find超时时间
delay(3000);
DBG_UART.println("hello world!");
delay(2000);
while (!doCmdOk("AT", "OK"));
digitalWrite(13, HIGH); // 使Led亮
while (!doCmdOk("AT+CWMODE=3", "OK")); //工作模式
while (!doCmdOk("AT+CWJAP=\"PDCN\",\"1234567890\"", "OK"));
while (!doCmdOk("AT+CIPSTART=\"TCP\",\"183.230.40.39\",876", "CONNECT"));
while (!doCmdOk("AT+CIPMODE=1", "OK")); //透传模式
while (!doCmdOk("AT+CIPSEND", ">")); //开始发送
}
void loop()
{
static int edp_connect = 0;
bool trigger = false;
edp_pkt rcv_pkt;
unsigned char pkt_type;
int i, tmp;
char num[10];
/* EDP 连接 */
if (!edp_connect)
{
while (WIFI_UART.available()) WIFI_UART.read(); //清空串口接收缓存
packetSend(packetConnect(ID, KEY)); //发送EPD连接包
while (!WIFI_UART.available()); //等待EDP连接应答
if ((tmp = WIFI_UART.readBytes(rcv_pkt.data, sizeof(rcv_pkt.data))) > 0 )
{
rcvDebug(rcv_pkt.data, tmp);
if (rcv_pkt.data[0] == 0x20 && rcv_pkt.data[2] == 0x00 && rcv_pkt.data[3] == 0x00)
{
edp_connect = 1;
DBG_UART.println("EDP connected.");
}
else
DBG_UART.println("EDP connect error.");
}
packetClear(&rcv_pkt);
}
while (WIFI_UART.available())
{
readEdpPkt(&rcv_pkt);
if (isEdpPkt(&rcv_pkt))
{
pkt_type = rcv_pkt.data[0];
switch (pkt_type)
{
case CMDREQ:
char edp_command[50];
char edp_cmd_id[40];
long id_len, cmd_len, rm_len;
char datastr[20];
char val[10];
memset(edp_command, 0, sizeof(edp_command));
memset(edp_cmd_id, 0, sizeof(edp_cmd_id));
edpCommandReqParse(&rcv_pkt, edp_cmd_id, edp_command, &rm_len, &id_len, &cmd_len);
DBG_UART.print("rm_len: ");
DBG_UART.println(rm_len, DEC);
delay(10);
DBG_UART.print("id_len: ");
DBG_UART.println(id_len, DEC);
delay(10);
DBG_UART.print("cmd_len: ");
DBG_UART.println(cmd_len, DEC);
delay(10);
DBG_UART.print("id: ");
DBG_UART.println(edp_cmd_id);
delay(10);
DBG_UART.print("cmd: ");
DBG_UART.println(edp_command);
//数据处理与应用中EDP命令内容对应
//本例中格式为 datastream:[1/0]
sscanf(edp_command, "%[^:]:%s", datastr, val);
if (atoi(val) == 1)
digitalWrite(13, HIGH); // 使Led亮
else
digitalWrite(13, LOW); // 使Led灭
packetSend(packetDataSaveTrans(NULL, datastr, val)); //将新数据值上传至数据流
break;
default:
DBG_UART.print("unknown type: ");
DBG_UART.println(pkt_type, HEX);
break;
}
}
//delay(4);
}
if (rcv_pkt.len > 0)
packetClear(&rcv_pkt);
delay(150);
}
/*
* readEdpPkt
* 从串口缓存中读数据到接收缓存
*/
bool readEdpPkt(edp_pkt *p)
{
int tmp;
if ((tmp = WIFI_UART.readBytes(p->data + p->len, sizeof(p->data))) > 0 )
{
rcvDebug(p->data + p->len, tmp);
p->len += tmp;
}
return true;
}
/*
* packetSend
* 将待发数据发送至串口,并释放到动态分配的内存
*/
void packetSend(edp_pkt* pkt)
{
if (pkt != NULL)
{
WIFI_UART.write(pkt->data, pkt->len); //串口发送
WIFI_UART.flush();
free(pkt); //回收内存
}
}
void rcvDebug(unsigned char *rcv, int len)
{
int i;
DBG_UART.print("rcv len: ");
DBG_UART.println(len, DEC);
for (i = 0; i < len; i++)
{
DBG_UART.print(rcv[i], HEX);
DBG_UART.print(" ");
}
DBG_UART.println("");
}
[/code]
【5】功能测试:
设备上电后,可以看到电脑串口打印输出的内容,首先连接OneNET服务器:
连接成功后,可以看到设备在线状态:
点击设备应用中的开关按钮,发送开关命令给设备:
设备接收命令后进行解析,并在串口打印输出:
当解析到数据流switch0的值为1时设备开灯,Arduino 开发板的D13被点亮,相反为0时灯灭。
【6】效果演示:
Arduino+ESP8266接入OneNET
---------------------
作者:alin0111
来源:CSDN
原文:https://blog.csdn.net/alin0111/article/details/123488182
版权声明:本文为作者原创文章,转载请附上博文链接!
内容解析By:CSDN,CNBLOG博客文章一键转载插件
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)