针对于ROSkinetic和melodic使用的Gazebo版本,其余版本也类似,教你如何生成自己的.world文件。 对于ros的初学者来说,很多人都会想自己在gazebo中创建个环境,总感觉自己的地图虽然效果没有别人的好,但跑起来就是爽,去网上寻找的时候又发现网上并没有很详细的Gazebo Building Editor使用方法,这次我总结了一点简单的Gazebo Building Editor使用方法,希望能够帮到大家。
首先打开终端,输入
$ gazebo
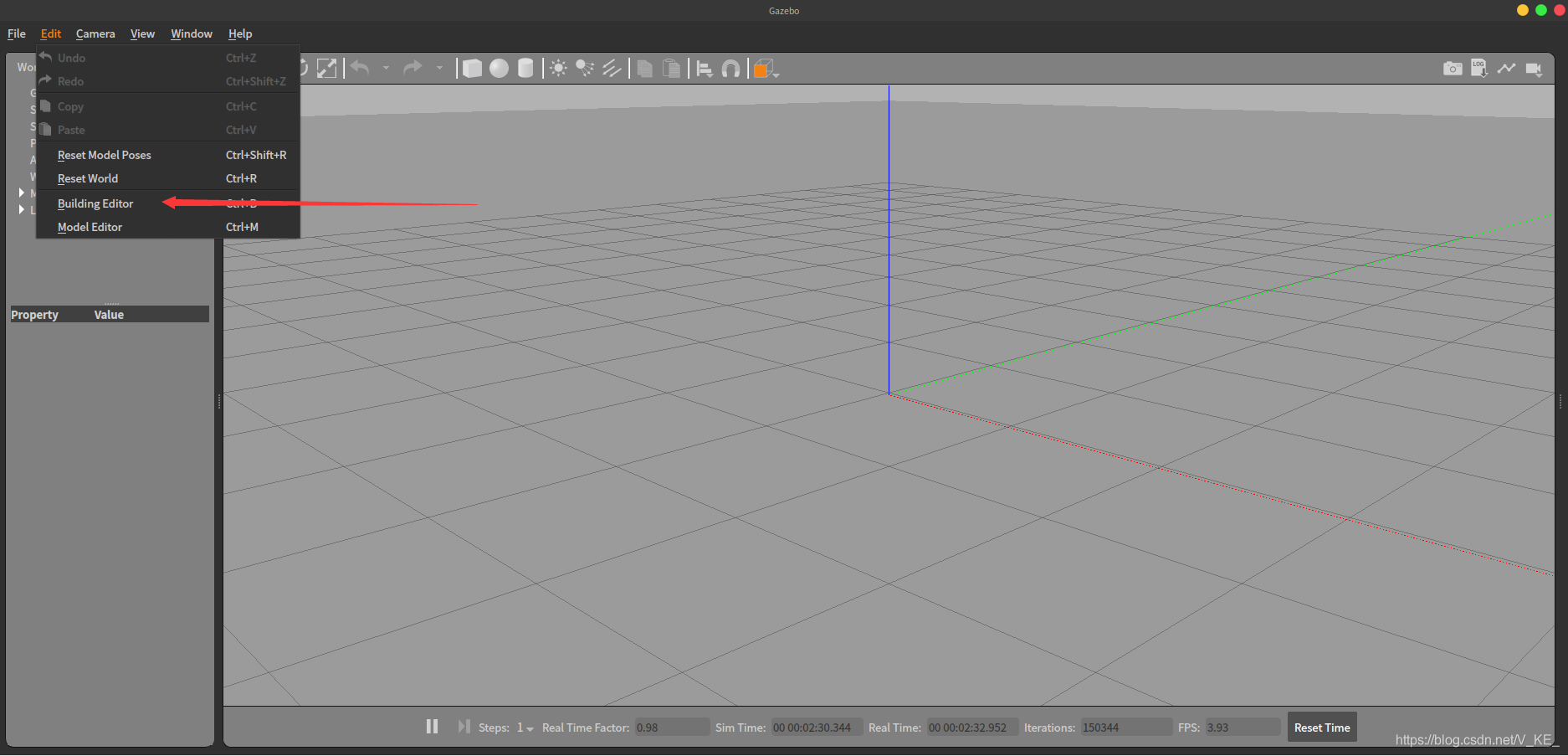
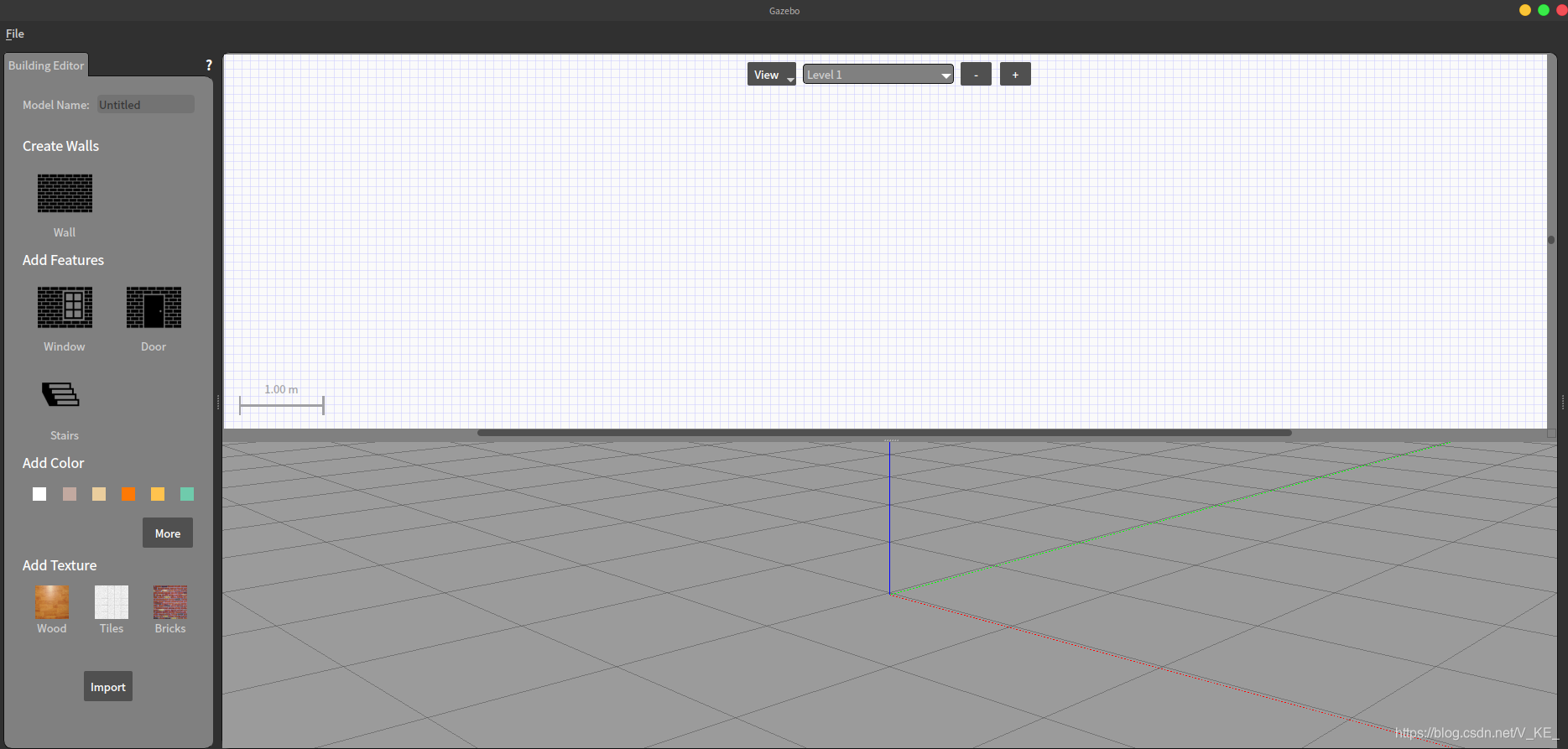
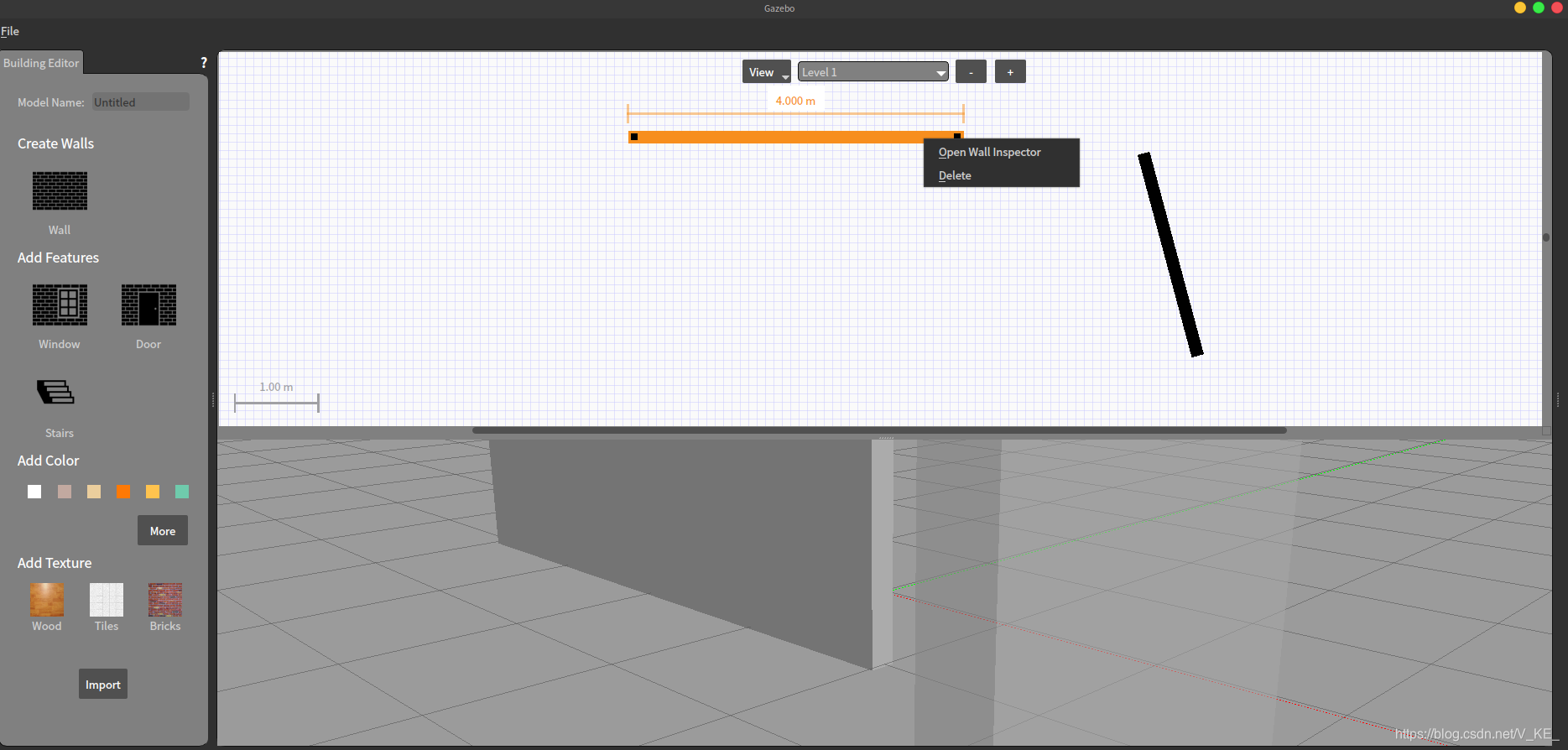
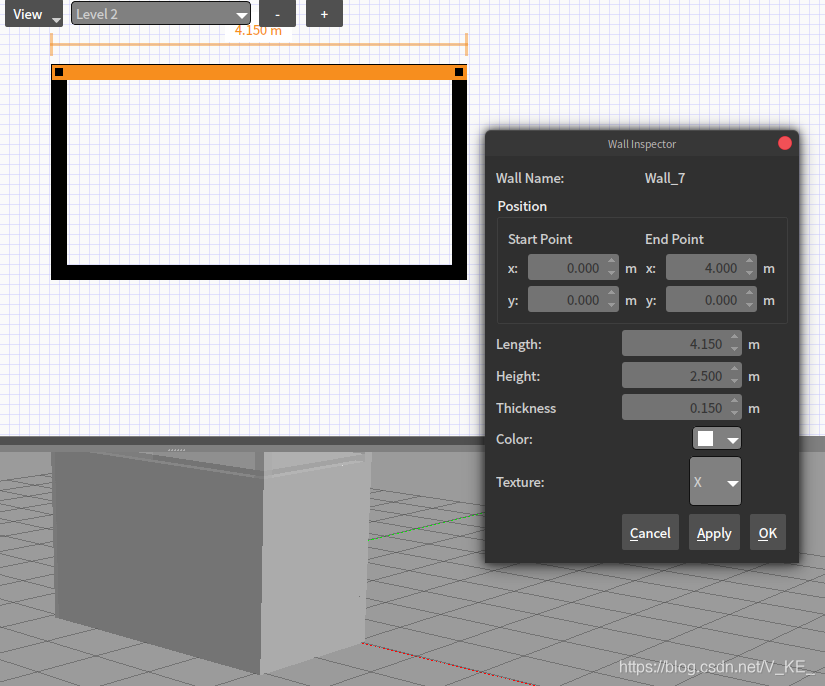
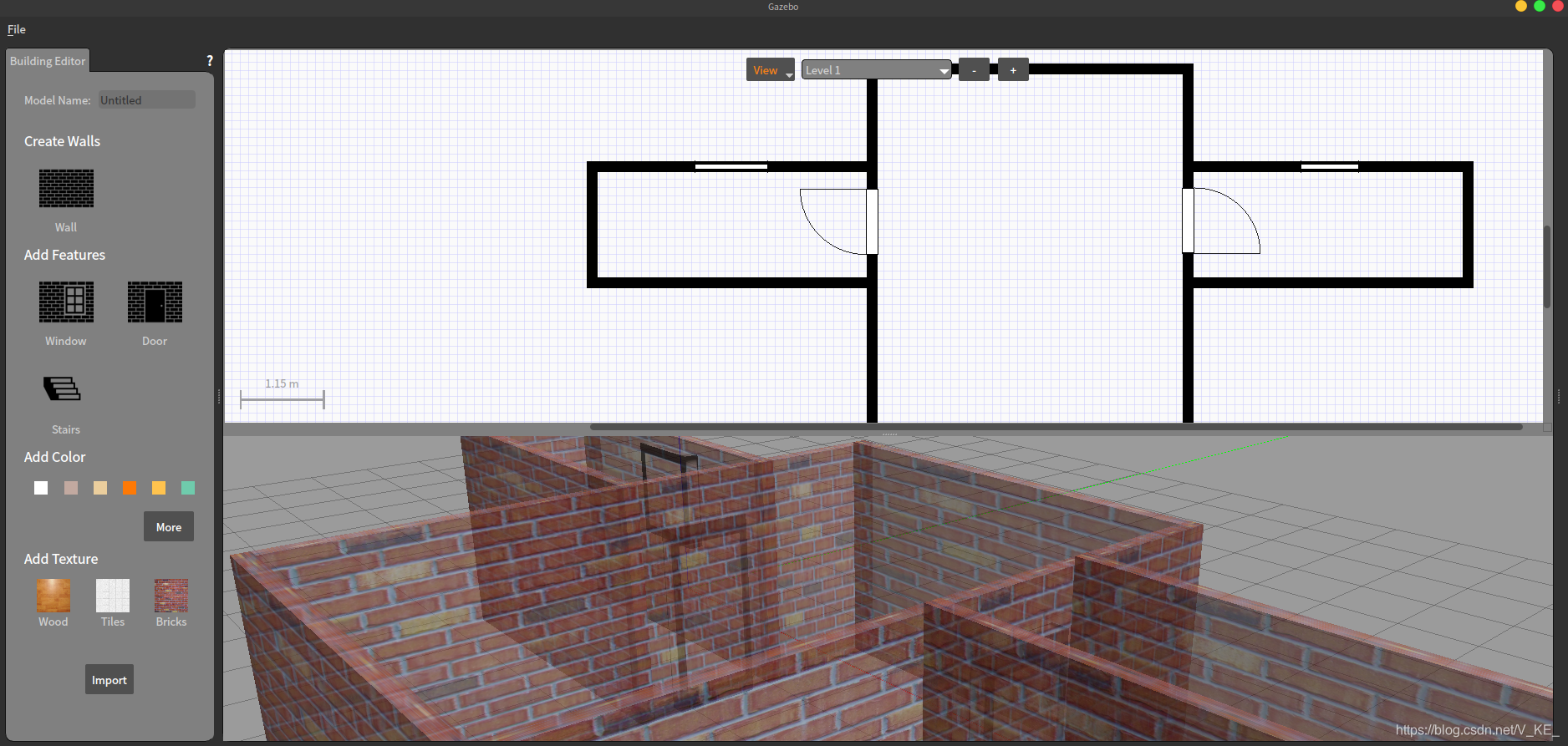
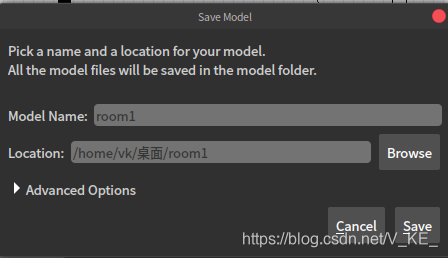
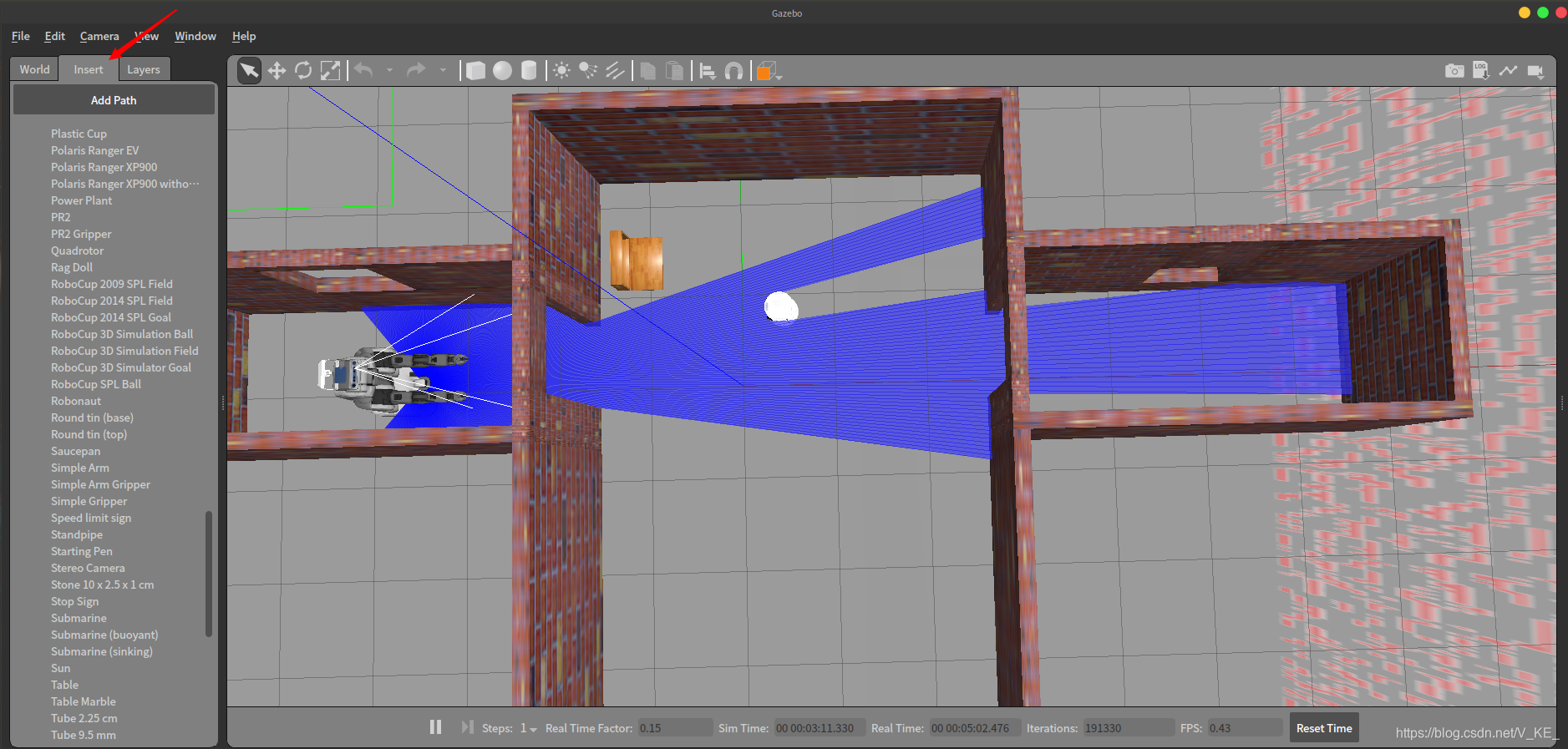
在Edit中找到Building Editor,或者直接Ctrl+B,都能打开界面 在左侧可以选择自己想要导入的元素,右击导入的元素可对元素参数进行编辑。 如图所示: Length、Height、Thickness分别指墙的长度、高度和宽度。 同理,编辑好其他你加入的元素。这里不做过多示范。 之后点击左上角File进行保存,路径自己选择,保存后会在路径所在位置生成一个room1文件夹。 我们将gazebo关闭并再次打开。在Insert中选择自己已经下载好的模型添加到环境中,就可以保存了。 保存的时候将文件后缀改成.world选择好路径,之后就可以在roslaunch中加载打开此地图环境了。