麦克纳姆轮运动学分析
是最常见的安装方式
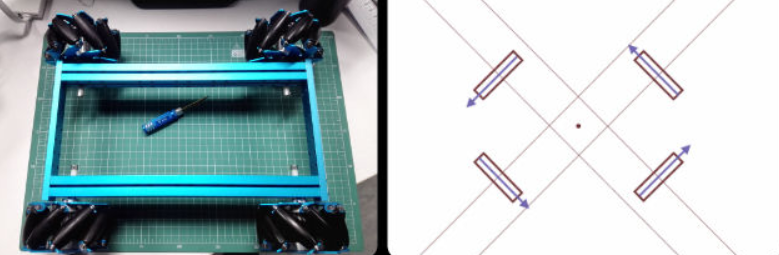
麦轮底盘的正逆运动学模型
以O-长方形的安装方式为例,四个轮子的着地点形成一个矩形。正运动学模型(forward kinematic model)将得到一系列公式,让我们可以通过四个轮子的速度,计算出底盘的运动状态;而逆运动学模型(inverse kinematic model)得到的公式则是可以根据底盘的运动状态解算出四个轮子的速度。需要注意的是,底盘的运动可以用三个独立变量来描述:X轴平动、Y轴平动、yaw 轴自转;而四个麦轮的速度也是由四个独立的电机提供的。所以四个麦轮的合理速度是存在某种约束关系的,逆运动学可以得到唯一解,而正运动学中不符合这个约束关系的方程将无解。
先试图构建逆运动学模型,由于麦轮底盘的数学模型比较复杂,我们在此分四步进行:
①将底盘的运动分解为三个独立变量来描述;
②根据第一步的结果,计算出每个轮子轴心位置的速度;
③根据第二步的结果,计算出每个轮子与地面接触的辊子的速度;
④根据第三部的结果,计算出轮子的真实转速。
一、底盘运动的分解
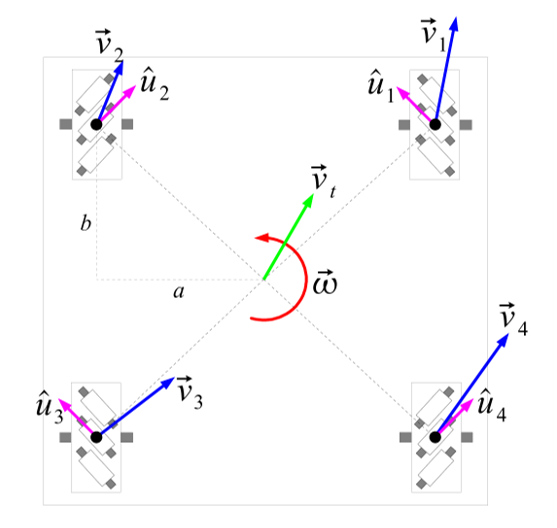
我们知道,刚体在平面内的运动可以分解为三个独立分量:X轴平动、Y轴平动、yaw 轴自转。如下图所示,底盘的运动也可以分解为三个量:
 表示 X 轴运动的速度,即左右方向,定义向右为正;
表示 X 轴运动的速度,即左右方向,定义向右为正;
 表示 Y 轴运动的速度,即前后方向,定义向前为正;
表示 Y 轴运动的速度,即前后方向,定义向前为正;
 表示 yaw 轴自转的角速度,定义逆时针为正。
表示 yaw 轴自转的角速度,定义逆时针为正。
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度。
以上三个量一般都视为四个轮子的几何中心(矩形的对角线交点)的速度。

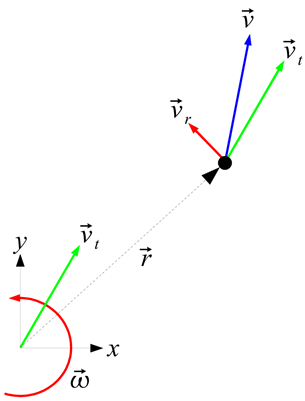
二、计算出轮子轴心位置的速度
定义:
 为从几何中心指向轮子轴心的矢量;
为从几何中心指向轮子轴心的矢量;
 为轮子轴心的运动速度矢量;
为轮子轴心的运动速度矢量;
 为轮子轴心沿垂直于 的方向(即切线方向)的速度分量;
为轮子轴心沿垂直于 的方向(即切线方向)的速度分量;
那么可以计算出:

分别计算 X、Y 轴的分量为:

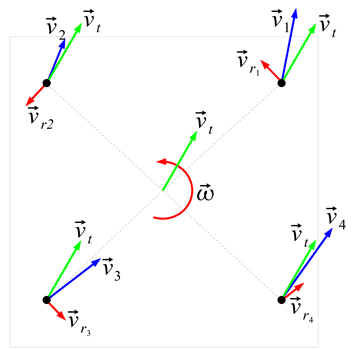
同理可以算出其他三个轮子轴心的速度。
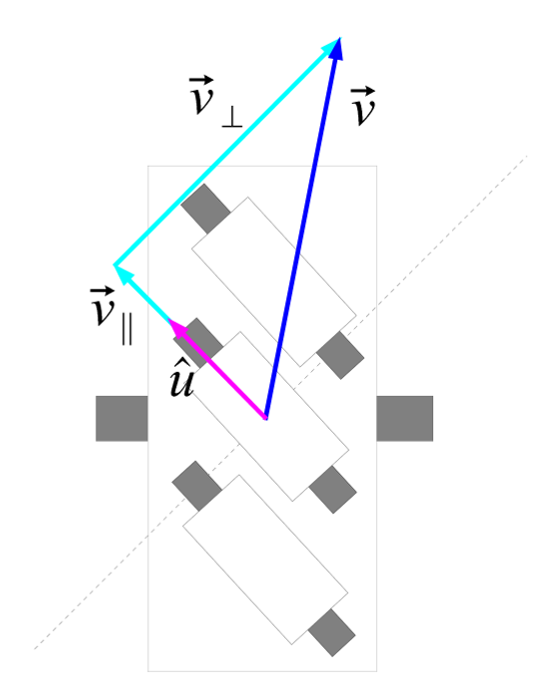
三、计算辊子的速度
根据轮子轴心的速度,可以分解出沿辊子方向的速度  和垂直于辊子方向的速度
和垂直于辊子方向的速度  。其中
。其中  是可以无视的(因为垂直方向速度对轮子转速没有贡献),而
是可以无视的(因为垂直方向速度对轮子转速没有贡献),而

其中  是沿辊子方向的单位矢量。
是沿辊子方向的单位矢量。
四、计算轮子的速度
从辊子速度到轮子转速的计算比较简单:

 根据上图所示的
根据上图所示的  和
和  的定义,有
的定义,有

结合以上四个步骤,可以根据底盘运动状态解算出四个轮子的转速:

以上方程组就是O-长方形麦轮底盘的逆运动学模型,而正运动学模型可以直接根据逆运动学模型中的三个方程解出来,此处不再赘述。
另一种计算方式
「传统」的推导过程虽然严谨,但还是比较繁琐的。这里介绍一种简单的逆运动学计算方式。
我们知道,全向移动底盘是一个纯线性系统,而刚体运动又可以线性分解为三个分量。那么只需要计算出麦轮底盘在「沿X轴平移」、「沿Y轴平移」、「绕几何中心自转」时,四个轮子的速度,就可以通过简单的加法,计算出这三种简单运动所合成的「平动+旋转」运动时所需要的四个轮子的转速。而这三种简单运动时,四个轮子的速度可以通过简单的测试,或是推动底盘观察现象得出。
当底盘沿着 X 轴平移时:

当底盘沿着 Y 轴平移时:

当底盘绕几何中心自转时:

将以上三个方程组相加,得到的恰好是根据「传统」方法计算出的结果。这种计算方式不仅适用于O-长方形的麦轮底盘,也适用于任何一种全向移动的机器人底盘。
参考 https://zhuanlan.zhihu.com/p/20282234?utm_source=qq&utm_medium=social
转载于:https://www.cnblogs.com/FangLai-you/p/10867791.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)