V4L2接口解析
操作步骤
应用程序通过V4L2接口采集视频数据步骤
打开视频设备文件,通过视频采集的参数初始化,通过V4L2接口设置视频图像属性。
申请若干视频采集的帧缓存区,并将这些帧缓冲区从内核空间映射到用户空间,便于应用程序读取/处理视频数据。
将申请到的帧缓冲区在视频采集输入队列排队,并启动视频采集。
驱动开始视频数据的采集,应用程序从视频采集输出队列中取出帧缓冲区,处理后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视频数据。
停止视频采集。
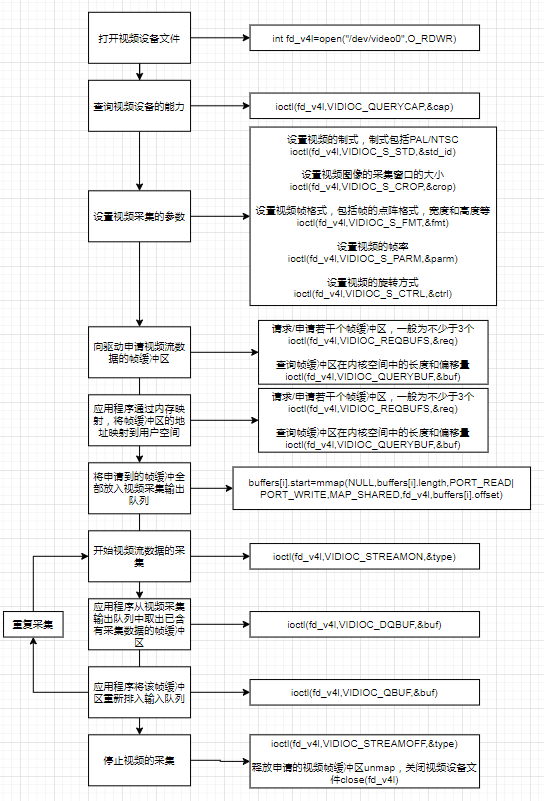
具体实现如下图
图中文字
打开视频设备文件
int fd_v4l=open("/dev/video0",O_RDWR)
查询视频设备的能力
ioctl(fd_v4l,VIDIOC_QUERYCAP,&cap)
设置视频采集的参数
设置视频的制式,制式包括PAL/NTSC
ioctl(fd_v4l,VIDIOC_S_STD,&std_id)
设置视频图像的采集窗口的大小
ioctl(fd_v4l,VIDIOC_S_CROP,&crop)
设置视频帧格式,包括帧的点阵格式,宽度和高度等
ioctl(fd_v4l,VIDIOC_S_FMT,&fmt)
设置视频的帧率
ioctl(fd_v4l,VIDIOC_S_PARM,&parm)
设置视频的旋转方式
ioctl(fd_v4l,VIDIOC_S_CTRL,&ctrl)
向驱动申请视频流数据的帧缓冲区
请求/申请若干个帧缓冲区,一般为不少于3个
ioctl(fd_v4l,VIDIOC_REQBUFS,&req)
查询帧缓冲区在内核空间中的长度和偏移量
ioctl(fd_v4l,VIDIOC_QUERYBUF,&buf)
应用程序通过内存映射,将帧缓冲区的地址映射到用户空间
buffers[i].start=mmap(NULL,buffers[i].length,PORT_READ|PORT_WRITE,MAP_SHARED,fd_v4l,buffers[i].offset)
将申请到的帧缓冲全部放入视频采集输出队列
ioctl(fd_v4l,VIDIOC_QBUF,&buf)
开始视频流数据的采集
ioctl(fd_v4l,VIDIOC_STREAMON,&type)
应用程序从视频采集输出队列中取出已含有采集数据的帧缓冲区
ioctl(fd_v4l,VIDIOC_DQBUF,&buf)
应用程序将该帧缓冲区重新排入输入队列
ioctl(fd_v4l,VIDIOC_QBUF,&buf)
停止视频的采集
ioctl(fd_v4l,VIDIOC_STREAMOFF,&type)
释放申请的视频帧缓冲区unmap,关闭视频设备文件close(fd_v4l)
ioctl控制符
VIDIOC_QUERYCAP 查询设备的属性
VIDIOC_ENUM_FMT 帧格式
VIDIOC_S_FMT 设置视频帧格式,对应struct v4l2_format
VIDIOC_G_FMT 获取视频帧格式等
VIDIOC_REQBUFS 请求/申请若干个帧缓冲区,一般为不少于3个
VIDIOC_QUERYBUF 查询帧缓冲区在内核空间的长度和偏移量
VIDIOC_QBUF 将申请到的帧缓冲区全部放入视频采集输出队列
VIDIOC_STREAMON 开始视频流数据的采集
VIDIOC_DQBUF 应用程序从视频采集输出队列中取出已含有采集数据的帧缓冲区
VIDIOC_STREAMOFF 应用程序将该帧缓冲区重新挂入输入队列
相关结构体解析
1.VIDIOC_QUERYCAP------>struct v4l2_capability
struct v4l2_capability {
__u8 driver[16]; // 驱动模块的名字
__u8 card[32]; // 设备名字
__u8 bus_info[32]; // 总线信息
__u32 version; // 内核版本
__u32 capabilities; // 整个物理设备支持的功能
__u32 device_caps; // 通过这个特定设备访问的功能
__u32 reserved[3];
};
其中capabilities: 4000001通过与各种宏位与,可以获得物理设备的功能属性。比如:
//#define V4L2_CAP_VIDEO_CAPTURE 0x00000001 /* Is a video capture device */ // 是否支持视频捕获
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
{
printf("Device %s: supports capture.\n", FILE_VIDEO);
}
//#define V4L2_CAP_STREAMING 0x04000000 /* streaming I/O ioctls */ // 是否支持输入输出流控制
if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
{
printf("Device %s: supports streaming.\n", FILE_VIDEO);
}
2.VIDIOC_ENUM_FMT------>struct v4l2_fmtdesc
struct v4l2_fmtdesc {
__u32 index; /* Format number */
__u32 type; /* enum v4l2_buf_type */
__u32 flags;
__u8 description[32]; /* Description string */
__u32 pixelformat; /* Format fourcc */
__u32 reserved[4];
};
通过这个结构体,可以显示对应的摄像头所支持视频帧格式。
struct v4l2_fmtdesc fmtdesc;
fmtdesc.index = 0;
fmtdesc.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
printf("Supportformat:/n");
while(ioctl(fd, VIDIOC_ENUM_FMT, &fmtdesc) != -1)
{
printf("/t%d.%s/n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
3.VIDIOC_S_FMT&VIDIOC_G_FMT------>struct v4l2_format
查看或设置视频帧格式
struct v4l2_format {
__u32 type; // 帧类型
union {
/* V4L2_BUF_TYPE_VIDEO_CAPTURE */
struct v4l2_pix_format pix; //像素格式
/* V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE */
struct v4l2_pix_format_mplane pix_mp;
/* V4L2_BUF_TYPE_VIDEO_OVERLAY */
struct v4l2_window win;
/* V4L2_BUF_TYPE_VBI_CAPTURE */
struct v4l2_vbi_format vbi;
/* V4L2_BUF_TYPE_SLICED_VBI_CAPTURE */
struct v4l2_sliced_vbi_format sliced;
/* V4L2_BUF_TYPE_SDR_CAPTURE */
struct v4l2_sdr_format sdr;
/* user-defined */
__u8 raw_data[200];
} fmt;
};
struct v4l2_pix_format {
__u32 width; // 像素高度
__u32 height; // 像素宽度
__u32 pixelformat; // 像素格式
__u32 field; /* enum v4l2_field */
__u32 bytesperline; /* for padding, zero if unused */
__u32 sizeimage;
__u32 colorspace; /* enum v4l2_colorspace */
__u32 priv; /* private data, depends on pixelformat */
__u32 flags; /* format flags (V4L2_PIX_FMT_FLAG_*) */
__u32 ycbcr_enc; /* enum v4l2_ycbcr_encoding */
__u32 quantization; /* enum v4l2_quantization */
__u32 xfer_func; /* enum v4l2_xfer_func */
};
4.VIDIOC_CROPCAP------>struct v4l2_cropcap
5.VIDIOC_G_PARM&VIDIOC_S_PARM------>struct v4l2_streamparm
设置Stream信息,主要设置帧率。
struct v4l2_streamparm {
__u32 type; /* enum v4l2_buf_type */
union {
struct v4l2_captureparm capture;
struct v4l2_outputparm output;
__u8 raw_data[200]; /* user-defined */
} parm;
};
struct v4l2_captureparm {
/* Supported modes */
__u32 capability;
/* Current mode */
__u32 capturemode;
/* Time per frame in seconds */
struct v4l2_fract timeperframe;
/* Driver-specific extensions */
__u32 extendedmode;
/* # of buffers for read */
__u32 readbuffers;
__u32 reserved[4];
};
// timeperframe
// numerator和denominator可描述为每numerator秒有denominator帧
struct v4l2_fract {
__u32 numerator; // 分子
__u32 denominator; // 分母
};
6.VIDIOC_REQBUFS------>struct v4l2_requestbuffers
申请和管理缓冲区,应用程序和设备有三种交换数据方法,直接read/write(裸机)、内存映射(系统),用户指针(…)。一般在操作系统管理下,都是使用内存映射的方式。
struct v4l2_requestbuffers {
__u32 count; // 缓冲区内缓冲帧的数目
__u32 type; // 缓冲帧数据格式
__u32 memory; //
__u32 reserved[2];
};
enum v4l2_memory {
V4L2_MEMORY_MMAP = 1, // 内存映射
V4L2_MEMORY_USERPTR = 2, // 用户指针
V4L2_MEMORY_OVERLAY = 3,
V4L2_MEMORY_DMABUF = 4,
};
7.VIDIOC_QUERYBUF------>struct v4l2_buffer
struct v4l2_buffer {
__u32 index; // buffer的id
__u32 type; // enum v4l2_buf_type
__u32 bytesused; // buf中已经使用的字节数
__u32 flags; // MMAP 或 USERPTR
__u32 field;
struct timeval timestamp; // 帧时间戳
struct v4l2_timecode timecode;
__u32 sequence; // 队列中的序号
/* memory location */
__u32 memory;
union {
__u32 offset; // 设备内存起始offset
unsigned long userptr; // 指向用户空间的指针
struct v4l2_plane *planes;
__s32 fd;
} m;
__u32 length; // 缓存帧长度
__u32 reserved2;
__u32 reserved;
};
8.VIDIOC_DQBUF
应用程序从视频采集输出队列中取出已含有采集数据的帧缓冲区
9.VIDIOC_STREAMON&VIDIOC_STREAMOFF
开始视频采集和关闭视频采集
10.VIDIOC_QBUF
应用程序将该帧缓冲区重新挂入输入队列
使用V4L2接口采集图片
yuyv格式摄像头
v4l2grab.c
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <sys/ioctl.h>
#include <stdlib.h>
#include <sys/mman.h>
#include <linux/types.h>
#include <linux/videodev2.h>
#include "v4l2grab.h"
#define TRUE 1
#define FALSE 0
#define FILE_VIDEO "/dev/video0"
#if 1
#define BMP "/usr/image_bmp.bmp"
#define YUV "/usr/image_yuv.yuv"
#else
#define BMP "//home/book/100ask_roc-rk3399-pc/USBvideo/lab_v4l2_yuyv/image_bmp.bmp"
#define YUV "//home/book/100ask_roc-rk3399-pc/USBvideo/lab_v4l2_yuyv/image_yuv.yuv"
#endif
#if 1
#define IMAGEWIDTH 640
#define IMAGEHEIGHT 480
#else
#define IMAGEWIDTH 1920
#define IMAGEHEIGHT 1080
#endif
static int fd;
static struct v4l2_capability cap;
struct v4l2_fmtdesc fmtdesc;
struct v4l2_format fmt,fmtack;
struct v4l2_streamparm setfps;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
enum v4l2_buf_type type;
/*缓存RGB颜色数据*/
unsigned char frame_buffer[IMAGEWIDTH*IMAGEHEIGHT*3];
struct buffer
{
void * start;
unsigned int length;
} * buffers;
int init_v4l2(void)
{
int i;
int ret = 0;
//opendev
if ((fd = open(FILE_VIDEO, O_RDWR)) == -1)
{
printf("Error opening V4L interface\n");
return (FALSE);
}
//query cap
/*
* 读video_capability中信息。通过调用 IOCTL 函数和接口命令 VIDIOC_QUERYCAP 查询摄像头的信息,
* 结构体v4l2_capability中有包括驱动名称driver、card、bus_info、version以及属性capabilities。
* 这里我们需要检查一下是否是为视频采集设备V4L2_CAP_VIDEO_CAPTURE以及是否支持流IO操作V4L2_CAP_STREAMING。
*/
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1)
{
printf("Error opening device %s: unable to query device.\n",FILE_VIDEO);
return (FALSE);
}
else
{
printf("driver:\t\t%s\n",cap.driver);
printf("card:\t\t%s\n",cap.card);
printf("bus_info:\t%s\n",cap.bus_info);
printf("version:\t%d\n",cap.version);
printf("capabilities:\t%x\n",cap.capabilities);
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
{
printf("Device %s: supports capture.\n",FILE_VIDEO);
}
if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
{
printf("Device %s: supports streaming.\n",FILE_VIDEO);
}
}
//emu all support fmt
/*
* 列举摄像头所支持像素格式。使用命令VIDIOC_ENUM_FMT,获取到的信息通过结构体v4l2_fmtdesc查询。
* 这步很关键,不同的摄像头可能支持的格式不一样,V4L2可以支持的格式很多,/usr/include/linux/videodev2.h文件中可以看到。
*/
fmtdesc.index=0;
fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
printf("Support format:\n");
while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1)
{
printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
//set fmt
/*
* 设置像素格式。一般的USB摄像头都会支持YUYV,有些还支持其他的格式。通过前一步对摄像头所支持像素格式查询,下面需要对格式进行设置。
* 命令为VIDIOC_S_FMT,通过结构体v4l2_format把图像的像素格式设置为V4L2_PIX_FMT_YUYV,高度和宽度设置为IMAGEHEIGHT和IMAGEWIDTH。
* 一般情况下一个摄像头所支持的格式是不可以随便更改的,我尝试把把一个只支持YUYV和MJPEG的摄像头格式改为RGB24或者JPEG,都没有成功。
*/
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;//试试这个 V4L2_PIX_FMT_MJPEG, wzp
fmt.fmt.pix.height = IMAGEHEIGHT;
fmt.fmt.pix.width = IMAGEWIDTH;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
if(ioctl(fd, VIDIOC_S_FMT, &fmt) == -1)
{
printf("Unable to set format\n");
return FALSE;
}
if(ioctl(fd, VIDIOC_G_FMT, &fmt) == -1)
{
printf("Unable to get format\n");
return FALSE;
}
/* 为了确保设置的格式作用到摄像头上,再通过命令VIDIOC_G_FMT将摄像头设置读取回来。*/
{
printf("fmt.type:\t\t%d\n",fmt.type);
printf("pix.pixelformat:\t%c%c%c%c\n",fmt.fmt.pix.pixelformat & 0xFF, (fmt.fmt.pix.pixelformat >> 8) & 0xFF,(fmt.fmt.pix.pixelformat >> 16) & 0xFF, (fmt.fmt.pix.pixelformat >> 24) & 0xFF);
printf("pix.height:\t\t%d\n",fmt.fmt.pix.height);
printf("pix.width:\t\t%d\n",fmt.fmt.pix.width);
printf("pix.field:\t\t%d\n",fmt.fmt.pix.field);
}
//set fps
setfps.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
setfps.parm.capture.timeperframe.numerator = 10;
setfps.parm.capture.timeperframe.denominator = 10;
printf("init %s \t[OK]\n",FILE_VIDEO);
return TRUE;
}
int v4l2_grab(void)
{
unsigned int n_buffers;
printf("start grab yuyv\n");
//request for 4 buffers
/* 申请缓存区。使用参数VIDIOC_REQBUFS和结构体v4l2_requestbuffers。v4l2_requestbuffers结构中定义了缓存的数量,系统会据此申请对应数量的视频缓存。 */
req.count=4;
req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory=V4L2_MEMORY_MMAP;
if(ioctl(fd,VIDIOC_REQBUFS,&req)==-1)
{
printf("request for buffers error\n");
}
//mmap for buffers
buffers = malloc(req.count*sizeof (*buffers));
if (!buffers)
{
printf ("Out of memory\n");
return(FALSE);
}
for (n_buffers = 0; n_buffers < req.count; n_buffers++)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
//query buffers
if (ioctl (fd, VIDIOC_QUERYBUF, &buf) == -1)
{
printf("query buffer error\n");
return(FALSE);
}
buffers[n_buffers].length = buf.length;
//map
buffers[n_buffers].start = mmap(NULL,buf.length,PROT_READ |PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
if (buffers[n_buffers].start == MAP_FAILED)
{
printf("buffer map error\n");
return(FALSE);
}
}
//queue
for (n_buffers = 0; n_buffers < req.count; n_buffers++)
{
buf.index = n_buffers;
ioctl(fd, VIDIOC_QBUF, &buf);
}
/* 采集视频。使用命令VIDIOC_STREAMON。*/
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
printf("start grab yuyv 1\n");
ioctl (fd, VIDIOC_STREAMON, &type);
printf("start grab yuyv 2\n");
/* 取出缓存中已经采样的缓存。使用命令VIDIOC_DQBUF。视频数据存放的位置是buffers[n_buffers].start的地址处。 */
ioctl(fd, VIDIOC_DQBUF, &buf);
printf("start grab yuyv 3\n");
printf("grab yuyv OK\n");
return(TRUE);
}
/* 由于采集到的图像数据是YUYV格式,需要进行颜色空间转换,定义了转换函数。 */
int yuyv_2_rgb888(void)
{
int i,j;
unsigned char y1,y2,u,v;
int r1,g1,b1,r2,g2,b2;
char * pointer;
pointer = buffers[0].start;
/* 由于后续RGB的数据要存储到BMP中,而BMP文件中颜色数据是“倒序”,即从下到上,从左到右,因而在向frame_buffer写数据时是从最后一行最左测开始写,每写满一行行数减一。 */
for(i=0;i<IMAGEHEIGHT;i++)
{
for(j=0;j<(IMAGEWIDTH/2);j++)
{
y1 = *( pointer + (i*(IMAGEWIDTH/2)+j)*4);
u = *( pointer + (i*(IMAGEWIDTH/2)+j)*4 + 1);
y2 = *( pointer + (i*(IMAGEWIDTH/2)+j)*4 + 2);
v = *( pointer + (i*(IMAGEWIDTH/2)+j)*4 + 3);
r1 = y1 + 1.042*(v-128);
g1 = y1 - 0.34414*(u-128) - 0.71414*(v-128);
b1 = y1 + 1.772*(u-128);
r2 = y2 + 1.042*(v-128);
g2 = y2 - 0.34414*(u-128) - 0.71414*(v-128);
b2 = y2 + 1.772*(u-128);
if(r1>255)
r1 = 255;
else if(r1<0)
r1 = 0;
if(b1>255)
b1 = 255;
else if(b1<0)
b1 = 0;
if(g1>255)
g1 = 255;
else if(g1<0)
g1 = 0;
if(r2>255)
r2 = 255;
else if(r2<0)
r2 = 0;
if(b2>255)
b2 = 255;
else if(b2<0)
b2 = 0;
if(g2>255)
g2 = 255;
else if(g2<0)
g2 = 0;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 ) = (unsigned char)b1;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 + 1) = (unsigned char)g1;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 + 2) = (unsigned char)r1;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 + 3) = (unsigned char)b2;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 + 4) = (unsigned char)g2;
*(frame_buffer + ((IMAGEHEIGHT-1-i)*(IMAGEWIDTH/2)+j)*6 + 5) = (unsigned char)r2;
}
}
printf("change to RGB OK \n");
}
int close_v4l2(void)
{
if(fd != -1)
{
close(fd);
return (TRUE);
}
return (FALSE);
}
/*
* 首先,打开视频设备文件,进行视频采集的参数初始化,通过V4L2接口设置视频图像的采集窗口、采集的点阵大小和格式;
* 其次,申请若干视频采集的帧缓冲区,并将这些帧缓冲区从内核空间映射到用户空间,便于应用程序读取/处理视频数据;
* 第三,将申请到的帧缓冲区在视频采集输入队列排队,并启动视频采集;
* 第四,驱动开始视频数据的采集,应用程序从视频采集输出队列取出帧缓冲区,处理完后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视频数据;
* 第五,停止视频采集。
*/
int main(void)
{
FILE * fp1,* fp2;
int grab;
BITMAPFILEHEADER bf;
BITMAPINFOHEADER bi;
fp1 = fopen(BMP, "wb");
if(!fp1)
{
printf("open "BMP" error\n");
return(FALSE);
}
fp2 = fopen(YUV, "wb");
if(!fp2)
{
printf("open "YUV"error\n");
return(FALSE);
}
if(init_v4l2() == FALSE)
{
return(FALSE);
}
//Set BITMAPINFOHEADER
bi.biSize = 40;
bi.biWidth = IMAGEWIDTH;
bi.biHeight = IMAGEHEIGHT;
bi.biPlanes = 1;
bi.biBitCount = 24;
bi.biCompression = 0;
bi.biSizeImage = IMAGEWIDTH*IMAGEHEIGHT*3;
bi.biXPelsPerMeter = 0;
bi.biYPelsPerMeter = 0;
bi.biClrUsed = 0;
bi.biClrImportant = 0;
//Set BITMAPFILEHEADER
bf.bfType = 0x4d42;
bf.bfSize = 54 + bi.biSizeImage;
bf.bfReserved = 0;
bf.bfOffBits = 54;
grab=v4l2_grab();
printf("GRAB is %d\n",grab);
printf("grab ok\n");
fwrite(buffers[0].start, IMAGEHEIGHT*IMAGEWIDTH*2,1, fp2);
printf("save "YUV"OK\n");
yuyv_2_rgb888();
fwrite(&bf, 14, 1, fp1);
fwrite(&bi, 40, 1, fp1);
fwrite(frame_buffer, bi.biSizeImage, 1, fp1);
printf("save "BMP"OK\n");
fclose(fp1);
fclose(fp2);
close_v4l2();
return(TRUE);
}
v4l2grab.h
/****************************************************/
/* */
/* v4lgrab.h */
/* */
/****************************************************/
#ifndef __V4LGRAB_H__
#define __V4LGRAB_H__
#include <stdio.h>
#define FREE(x) if((x)){free((x));(x)=NULL;}
typedef unsigned char BYTE;
typedef unsigned short WORD;
typedef unsigned long DWORD;
/**/
#pragma pack(1)
typedef struct tagBITMAPFILEHEADER{
WORD bfType; // the flag of bmp, value is "BM"
DWORD bfSize; // size BMP file ,unit is bytes
DWORD bfReserved; // 0
DWORD bfOffBits; // must be 54
}BITMAPFILEHEADER;
typedef struct tagBITMAPINFOHEADER{
DWORD biSize; // must be 0x28
DWORD biWidth; //
DWORD biHeight; //
WORD biPlanes; // must be 1
WORD biBitCount; //
DWORD biCompression; //
DWORD biSizeImage; //
DWORD biXPelsPerMeter; //
DWORD biYPelsPerMeter; //
DWORD biClrUsed; //
DWORD biClrImportant; //
}BITMAPINFOHEADER;
typedef struct tagRGBQUAD{
BYTE rgbBlue;
BYTE rgbGreen;
BYTE rgbRed;
BYTE rgbReserved;
}RGBQUAD;
#if defined(__cplusplus)
extern "C" { /* Make sure we have C-declarations in C++ programs */
#endif
//if successful return 1,or else return 0
int openVideo();
int closeVideo();
//data 用来存储数据的空间, size空间大小
void getVideoData(unsigned char *data, int size);
#if defined(__cplusplus)
}
#endif
#endif //__V4LGRAB_H___
mjpg格式摄像头
v4l2grab_mjpg.c
#include <unistd.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <sys/ioctl.h>
#include <stdlib.h>
#include <sys/mman.h>
#include <linux/types.h>
#include <linux/videodev2.h>
#include <string.h>
#include "v4l2grab.h"
#define TRUE 1
#define FALSE 0
#define FILE_VIDEO "/dev/video0"
#if 1
#define JPG "/usr/image_jpg.jpg"
#define BMP "/usr/image_bmp.bmp"
#define YUV "/usr/image_yuv.yuv"
#else
#define BMP "//home/book/100ask_roc-rk3399-pc/USBvideo/lab_v4l2_yuyv_fix/image_bmp.bmp"
#define YUV "//home/book/100ask_roc-rk3399-pc/USBvideo/lab_v4l2_yuyv_fix/image_yuv.yuv"
#endif
#if 1
#define IMAGEWIDTH 640
#define IMAGEHEIGHT 480
#else
//#define IMAGEWIDTH 1920
//#define IMAGEHEIGHT 1080
#define IMAGEWIDTH 3840
#define IMAGEHEIGHT 2160
#endif
static int fd;
static struct v4l2_capability cap;
struct v4l2_fmtdesc fmtdesc;
struct v4l2_format fmt,fmtack;
struct v4l2_streamparm setfps;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
enum v4l2_buf_type type;
/*缓存RGB颜色数据*/
unsigned char frame_buffer[IMAGEWIDTH*IMAGEHEIGHT*3];
struct buffer
{
void * start;
unsigned int length;
} * buffers;
int init_v4l2(void)
{
int i;
int ret = 0;
//opendev
if ((fd = open(FILE_VIDEO, O_RDWR)) == -1)
{
printf("Error opening V4L interface\n");
return (FALSE);
}
//query cap
/*
* 读video_capability中信息。通过调用 IOCTL 函数和接口命令 VIDIOC_QUERYCAP 查询摄像头的信息,
* 结构体v4l2_capability中有包括驱动名称driver、card、bus_info、version以及属性capabilities。
* 这里我们需要检查一下是否是为视频采集设备V4L2_CAP_VIDEO_CAPTURE以及是否支持流IO操作V4L2_CAP_STREAMING。
*/
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1)
{
printf("Error opening device %s: unable to query device.\n",FILE_VIDEO);
return (FALSE);
}
else
{
printf("driver:\t\t%s\n",cap.driver);
printf("card:\t\t%s\n",cap.card);
printf("bus_info:\t%s\n",cap.bus_info);
printf("version:\t%d\n",cap.version);
printf("capabilities:\t%x\n",cap.capabilities);//V4L2_CAP_VIDEO_CAPTURE // 是否支持图像获取
printf("device_caps:\t%x\n",cap.device_caps);
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
{
printf("Device %s: supports capture.\n",FILE_VIDEO);
}
if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
{
printf("Device %s: supports streaming.\n",FILE_VIDEO);
}
}
//emu all support fmt
/*
* 列举摄像头所支持像素格式。使用命令VIDIOC_ENUM_FMT,获取到的信息通过结构体v4l2_fmtdesc查询。
* 这步很关键,不同的摄像头可能支持的格式不一样,V4L2可以支持的格式很多,/usr/include/linux/videodev2.h文件中可以看到。
*/
fmtdesc.index=0;
fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
printf("Support format:\n");
while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1)
{
printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;//初始化
struct v4l2_fmtdesc fmt_1;
struct v4l2_frmsizeenum frmsize;
struct v4l2_frmivalenum frmival;
fmt_1.index = 0; //索引
fmt_1.type = type;
while (ioctl(fd, VIDIOC_ENUM_FMT, &fmt_1) >= 0) {
frmsize.pixel_format = fmt_1.pixelformat;
frmsize.index = 0;
while (ioctl(fd, VIDIOC_ENUM_FRAMESIZES, &frmsize) >= 0){
if(frmsize.type == V4L2_FRMSIZE_TYPE_DISCRETE){
printf("line:%d %dx%d\n",__LINE__, frmsize.discrete.width, frmsize.discrete.height);
}else if(frmsize.type == V4L2_FRMSIZE_TYPE_STEPWISE){
printf("line:%d %dx%d\n",__LINE__, frmsize.discrete.width, frmsize.discrete.height);
}
frmsize.index++;
}
fmt_1.index++;
}
//set fmt
/*
* 设置像素格式。一般的USB摄像头都会支持YUYV,有些还支持其他的格式。通过前一步对摄像头所支持像素格式查询,下面需要对格式进行设置。
* 命令为VIDIOC_S_FMT,通过结构体v4l2_format把图像的像素格式设置为V4L2_PIX_FMT_YUYV,高度和宽度设置为IMAGEHEIGHT和IMAGEWIDTH。
* 一般情况下一个摄像头所支持的格式是不可以随便更改的,我尝试把把一个只支持YUYV和MJPEG的摄像头格式改为RGB24或者JPEG,都没有成功。
*/
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
// fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;//wzp
fmt.fmt.pix.height = IMAGEHEIGHT;
fmt.fmt.pix.width = IMAGEWIDTH;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
// fmt.fmt.pix.field = V4L2_FIELD_NONE;//wzp
if(ioctl(fd, VIDIOC_S_FMT, &fmt) == -1)
{
printf("Unable to set format\n");
return FALSE;
}
if(ioctl(fd, VIDIOC_G_FMT, &fmt) == -1)
{
printf("Unable to get format\n");
return FALSE;
}
/* 为了确保设置的格式作用到摄像头上,再通过命令VIDIOC_G_FMT将摄像头设置读取回来。*/
{
printf("fmt.type:\t\t%d\n",fmt.type);
printf("pix.pixelformat:\t%c%c%c%c\n",fmt.fmt.pix.pixelformat & 0xFF, (fmt.fmt.pix.pixelformat >> 8) & 0xFF,(fmt.fmt.pix.pixelformat >> 16) & 0xFF, (fmt.fmt.pix.pixelformat >> 24) & 0xFF);
printf("pix.height:\t\t%d\n",fmt.fmt.pix.height);
printf("pix.width:\t\t%d\n",fmt.fmt.pix.width);
printf("pix.field:\t\t%d\n",fmt.fmt.pix.field);
}
//set fps
/*
setfps.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
setfps.parm.capture.timeperframe.numerator = 10;
setfps.parm.capture.timeperframe.denominator = 10;
*/
printf("init %s \t[OK]\n",FILE_VIDEO);
return TRUE;
}
int v4l2_grab(void)
{
unsigned int n_buffers;
printf("start grab yuyv\n");
//request for 4 buffers
/* 申请缓存区。使用参数VIDIOC_REQBUFS和结构体v4l2_requestbuffers。v4l2_requestbuffers结构中定义了缓存的数量,系统会据此申请对应数量的视频缓存。 */
req.count=4;
// req.count=1;//wzp
req.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory=V4L2_MEMORY_MMAP;
if(ioctl(fd,VIDIOC_REQBUFS,&req)==-1)
{
printf("request for buffers error\n");
}
//mmap for buffers
buffers = malloc(req.count*sizeof (*buffers));
// buffers = (uchar*)malloc(req.count*sizeof (*buffers));//wzp
if (!buffers)
{
printf ("Out of memory\n");
return(FALSE);
}
//将四个已申请到的缓冲帧映射到应用程序,用buffers 指针记录
for (n_buffers = 0; n_buffers < req.count; n_buffers++)
{
memset(&buf,0,sizeof(buf));
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
//query buffers
if (ioctl (fd, VIDIOC_QUERYBUF, &buf) == -1)
{
printf("query buffer error\n");
return(FALSE);
}
buffers[n_buffers].length = buf.length;
//map
buffers[n_buffers].start = mmap(NULL,buf.length,PROT_READ |PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
if (buffers[n_buffers].start == MAP_FAILED)
{
printf("buffer map error\n");
return(FALSE);
}
}
//queue
for (n_buffers = 0; n_buffers < req.count; n_buffers++)
{
buf.index = n_buffers;
ioctl(fd, VIDIOC_QBUF, &buf);
}
/* 采集视频。使用命令 VIDIOC_STREAMON。*/
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type);
/* 取出缓存中已经采样的缓存。使用命令 VIDIOC_DQBUF。视频数据存放的位置是buffers[n_buffers].start的地址处。 */
ioctl(fd, VIDIOC_DQBUF, &buf);
printf("grab yuyv OK\n");
return(TRUE);
}
int close_v4l2(void)
{
if(fd != -1)
{
close(fd);
return (TRUE);
}
return (FALSE);
}
/*
* 首先,打开视频设备文件,进行视频采集的参数初始化,通过V4L2接口设置视频图像的采集窗口、采集的点阵大小和格式;
* 其次,申请若干视频采集的帧缓冲区,并将这些帧缓冲区从内核空间映射到用户空间,便于应用程序读取/处理视频数据;
* 第三,将申请到的帧缓冲区在视频采集输入队列排队,并启动视频采集;
* 第四,驱动开始视频数据的采集,应用程序从视频采集输出队列取出帧缓冲区,处理完后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视频数据;
* 第五,停止视频采集。
*/
int main(void)
{
FILE * fp1;
int grab;
BITMAPFILEHEADER bf;
BITMAPINFOHEADER bi;
fp1 = fopen(JPG, "wb");
if(!fp1)
{
printf("open %s error\n", JPG);
return(FALSE);
}
if(init_v4l2() == FALSE)
{
return(FALSE);
}
grab=v4l2_grab();
printf("GRAB is %d\n",grab);
printf("grab ok\n");
fwrite(buffers[0].start, buffers[0].length,1, fp1);
printf("save %s OK\n", JPG);
fclose(fp1);
close_v4l2();
return(TRUE);
}
使用v4l2接口采集视频
使用QT编程
首先创建一个widget工程,在里面创建一个label
widget.h
#ifndef WIDGET_H
#define WIDGET_H
#include <QWidget>
#include "videodevice.h"
namespace Ui {
class Widget;
}
#define BYTE unsigned char
#define SBYTE signed char
#define SWORD signed short int
#define WORD unsigned short int
#define DWORD unsigned long int
#define SDWORD signed long int
typedef struct tagBITMAPFILEHEADER{
WORD bfType; // the flag of bmp, value is "BM"
DWORD bfSize; // size BMP file ,unit is bytes
DWORD bfReserved; // 0
DWORD bfOffBits; // must be 54
}BITMAPFILEHEADER;
typedef struct tagBITMAPINFOHEADER{
DWORD biSize; // must be 0x28
DWORD biWidth; //
DWORD biHeight; //
WORD biPlanes; // must be 1
WORD biBitCount; //
DWORD biCompression; //
DWORD biSizeImage; //
DWORD biXPelsPerMeter; //
DWORD biYPelsPerMeter; //
DWORD biClrUsed; //
DWORD biClrImportant; //
}BITMAPINFOHEADER;
class Widget : public QWidget
{
Q_OBJECT
public:
explicit Widget(QWidget *parent = nullptr);
~Widget();
private:
Ui::Widget *ui;
void init_bmp_header();
VideoDevice *vd;
QImage *frame;
int rs;
size_t len;
BITMAPFILEHEADER bf;
BITMAPINFOHEADER bi;
#ifdef USE_YUYV
unsigned char *rgb_buffer;
#endif
unsigned char * yuv_buffer_pointer;
private slots:
void paintEvent(QPaintEvent *);
};
#endif // WIDGET_H
widget.cpp
#include "widget.h"
#include "ui_widget.h"
#include <QThread>
Widget::Widget(QWidget *parent) :
QWidget(parent),
ui(new Ui::Widget)
{
ui->setupUi(this);
vd = new VideoDevice(FILE_VIDEO);
frame = new QImage();
#ifdef USE_YUYV
rgb_buffer = (unsigned char *)malloc(IMAGEWIDTH*IMAGEHEIGHT*3*sizeof(unsigned char));
init_bmp_header();
#endif
}
Widget::~Widget()
{
delete ui;
}
void Widget::paintEvent(QPaintEvent *)
{
#ifndef USE_YUYV
QByteArray aa;
QPixmap pic;
rs = vd->get_frame(&yuv_buffer_pointer, &len);
aa.append((char *)yuv_buffer_pointer, len);
frame->loadFromData(aa);
pic=QPixmap::fromImage(*frame,Qt::AutoColor);
pic=pic.scaled(SCALED_WIDTH, SCALED_HEIGHT, Qt::KeepAspectRatio, Qt::SmoothTransformation); // 按比例缩放
ui->label->setPixmap(pic);
rs = vd->unget_frame();
#else
QByteArray aa;
rs = vd->get_frame(&yuv_buffer_pointer, &len);
vd->convert_yuv_to_rgb_buffer(&yuv_buffer_pointer, rgb_buffer);
aa.append((char *)&bf.bfType, 2);
aa.append((char *)&bf.bfSize, 4);
aa.append((char *)&bf.bfReserved, 4);
aa.append((char *)&bf.bfOffBits, 4);
aa.append((char *)&bi.biSize, 4);
aa.append((char *)&bi.biWidth, 4);
aa.append((char *)&bi.biHeight, 4);
aa.append((char *)&bi.biPlanes, 2);
aa.append((char *)&bi.biBitCount, 2);
aa.append((char *)&bi.biCompression, 4);
aa.append((char *)&bi.biSizeImage, 4);
aa.append((char *)&bi.biXPelsPerMeter, 4);
aa.append((char *)&bi.biYPelsPerMeter, 4);
aa.append((char *)&bi.biClrUsed, 4);
aa.append((char *)&bi.biClrImportant, 4);
aa.append((char *)rgb_buffer, IMAGEWIDTH*IMAGEHEIGHT*3);
frame->loadFromData(aa);
ui->label->setPixmap(QPixmap::fromImage(*frame,Qt::AutoColor));
rs = vd->unget_frame();
#endif
}
void Widget::init_bmp_header()
{
//Set BITMAPINFOHEADER
bi.biSize = 40;
bi.biWidth = IMAGEWIDTH;
bi.biHeight = IMAGEHEIGHT;
bi.biPlanes = 1;
bi.biBitCount = 24;
bi.biCompression = 0;
bi.biSizeImage = IMAGEWIDTH*IMAGEHEIGHT*3;
bi.biXPelsPerMeter = 0;
bi.biYPelsPerMeter = 0;
bi.biClrUsed = 0;
bi.biClrImportant = 0;
//Set BITMAPFILEHEADER
bf.bfType = 0x4d42;
bf.bfSize = 54 + bi.biSizeImage;
bf.bfReserved = 0;
bf.bfOffBits = 54;
}
videodevice.h
#ifndef VIDEODEVICE_H
#define VIDEODEVICE_H
#include <QString>
#include <QObject>
#include <QTextCodec>
#define FILE_VIDEO "/dev/video0"
//#define IMAGEWIDTH 3840
//#define IMAGEHEIGHT 2160
#define IMAGEWIDTH 1920
#define IMAGEHEIGHT 1080
//#define IMAGEWIDTH 640
//#define IMAGEHEIGHT 480
#define SCALED_WIDTH 640
#define SCALED_HEIGHT 480
#define JPG "/usr/image_jpg.jpg"
#define BMP "/usr/image_bmp.bmp"
#define YUV "/usr/image_yuv.yuv"
//#define USE_YUYV
#define TRUE 1
#define FALSE 0
#define CLEAR(x) memset(&(x), 0, sizeof(x))
class VideoDevice : public QObject
{
Q_OBJECT
public:
VideoDevice(char* dev_name);
~VideoDevice();
int get_frame(unsigned char ** yuv_buffer_pointer, size_t* len);
int unget_frame();
int convert_yuv_to_rgb_buffer(unsigned char** yuv_buffer_pointer, unsigned char* rgb_buffer);
private:
int open_device();
int init_device();
int start_capturing();
int init_mmap();
int stop_capturing();
int uninit_device();
int close_device();
struct buffer
{
void * start;
size_t length;
};
char* dev_name;
int fd;//video0 file
buffer* buffers;
unsigned int n_buffers;
int index;
};
#endif // VIDEODEVICE_H
videodevice.cpp
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <sys/mman.h>
#include <asm/types.h>
#include <fcntl.h>
#include <linux/fs.h>
#include <errno.h>
#include <string.h>
#include <linux/videodev2.h>
#include <QDebug>
#include "videodevice.h"
VideoDevice::VideoDevice(char* dev_name)
{
this->dev_name = dev_name;
this->fd = -1;
this->buffers = NULL;
this->n_buffers = 0;
this->index = -1;
if(open_device() == FALSE)
{
qDebug("open_device false");
close_device();
}
if(init_device() == FALSE)
{
qDebug("init_device false");
close_device();
}
if(start_capturing() == FALSE)
{
qDebug("start_capturing false");
stop_capturing();
close_device();
}
}
VideoDevice::~VideoDevice()
{
if(stop_capturing() == FALSE)
{
}
if(uninit_device() == FALSE)
{
}
if(close_device() == FALSE)
{
}
}
int VideoDevice::open_device()
{
fd = ::open(dev_name,O_RDWR);
if(fd == -1)
{
qDebug("Error opening V4L interface");
return FALSE;
}
return TRUE;
}
int VideoDevice::close_device()
{
if( ::close(fd) == FALSE)
{
qDebug("Error closing V4L interface");
return FALSE;
}
return TRUE;
}
int VideoDevice::init_device()
{
v4l2_capability cap;
v4l2_fmtdesc fmtdesc;
v4l2_format fmt;
v4l2_streamparm setfps;
enum v4l2_buf_type type;
qDebug("init_device()");
if(ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1)
{
qDebug("Error opening device %s: unable to query device.",dev_name);
return FALSE;
}
else
{
qDebug("driver:\t\t%s",cap.driver);
qDebug("card:\t\t%s",cap.card);
qDebug("bus_info:\t\t%s",cap.bus_info);
qDebug("version:\t\t%d",cap.version);
qDebug("capabili ties:\t%x",cap.capabilities);
qDebug("device_caps:\t%x\n",cap.device_caps);
if ((cap.capabilities & V4L2_CAP_VIDEO_CAPTURE) == V4L2_CAP_VIDEO_CAPTURE)
{
qDebug("Device %s: supports capture.",dev_name);
}
if ((cap.capabilities & V4L2_CAP_STREAMING) == V4L2_CAP_STREAMING)
{
qDebug("Device %s: supports streaming.",dev_name);
}
}
//emu all support fmt, list in /usr/include/linux/videodev2.h
fmtdesc.index=0;
fmtdesc.type=V4L2_BUF_TYPE_VIDEO_CAPTURE;
printf("Support format:\n");
while(ioctl(fd,VIDIOC_ENUM_FMT,&fmtdesc)!=-1)
{
printf("\t%d.%s\n",fmtdesc.index+1,fmtdesc.description);
fmtdesc.index++;
}
//emu all support pixel_fmt,
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
struct v4l2_fmtdesc fmt_1;
struct v4l2_frmsizeenum frmsize;
fmt_1.index = 0; //索引
fmt_1.type = type;
while (ioctl(fd, VIDIOC_ENUM_FMT, &fmt_1) >= 0) {
frmsize.pixel_format = fmt_1.pixelformat;
frmsize.index = 0;
while (ioctl(fd, VIDIOC_ENUM_FRAMESIZES, &frmsize) >= 0){
if(frmsize.type == V4L2_FRMSIZE_TYPE_DISCRETE){
printf("support pix: %dx%d\n",frmsize.discrete.width, frmsize.discrete.height);
}else if(frmsize.type == V4L2_FRMSIZE_TYPE_STEPWISE){
printf("line:%d %dx%d\n",__LINE__, frmsize.discrete.width, frmsize.discrete.height);
}
frmsize.index++;
}
fmt_1.index++;
}
//set fmt
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
#ifndef USE_YUYV
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;//wzp
#else
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
#endif
fmt.fmt.pix.height = IMAGEHEIGHT;
fmt.fmt.pix.width = IMAGEWIDTH;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
// fmt.fmt.pix.field = V4L2_FIELD_NONE;//wzp
if(ioctl(fd, VIDIOC_S_FMT, &fmt) == -1)
{
qDebug("Unable to set format");
return FALSE;
}
if(ioctl(fd, VIDIOC_G_FMT, &fmt) == -1)
{
qDebug("Unable to get format");
return FALSE;
}
/* Confirm that the setting is successful*/
{
printf("fmt.type:\t\t%d\n",fmt.type);
printf("pix.pixelformat:\t%c%c%c%c\n",fmt.fmt.pix.pixelformat & 0xFF, (fmt.fmt.pix.pixelformat >> 8) & 0xFF,(fmt.fmt.pix.pixelformat >> 16) & 0xFF, (fmt.fmt.pix.pixelformat >> 24) & 0xFF);
printf("pix.height:\t\t%d\n",fmt.fmt.pix.height);
printf("pix.width:\t\t%d\n",fmt.fmt.pix.width);
printf("pix.field:\t\t%d\n",fmt.fmt.pix.field);
}
/* get the fps*/
setfps.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if(ioctl(fd, VIDIOC_G_PARM, &setfps) == -1)
{
qDebug("Unable to get frame rate");
return FALSE;
}
else
{
qDebug("get fps OK!");
qDebug("timeperframe.numerator:%d",setfps.parm.capture.timeperframe.numerator);
qDebug("timeperframe.denominator:%d",setfps.parm.capture.timeperframe.denominator);
}
//set fps
setfps.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
setfps.parm.capture.timeperframe.numerator = 1;
setfps.parm.capture.timeperframe.denominator = 30;
if(ioctl(fd, VIDIOC_S_PARM, &setfps) == -1)
{
qDebug("Unable to set frame rate");
return FALSE;
}
else
{
qDebug("set fps OK!");
}
/* Confirm that the setting is successful*/
if(ioctl(fd, VIDIOC_G_PARM, &setfps) == -1)
{
qDebug("Unable to get frame rate");
return FALSE;
}
else
{
qDebug("get fps OK!");
qDebug("timeperframe.numerator:\t%d",setfps.parm.capture.timeperframe.numerator);
qDebug("timeperframe.denominator:\t%d",setfps.parm.capture.timeperframe.denominator);
}
//mmap
if(init_mmap() == FALSE )
{
qDebug("cannot mmap!");
return FALSE;
}
return TRUE;
}
int VideoDevice::init_mmap()
{
v4l2_requestbuffers req;
qDebug("init_mmap()");
/* 申请缓存区。使用参数VIDIOC_REQBUFS和结构体v4l2_requestbuffers。v4l2_requestbuffers结构中定义了缓存的数量,系统会据此申请对应数量的视频缓存。 */
req.count = 2;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
if(ioctl(fd, VIDIOC_REQBUFS, &req) == -1)
{
qDebug("request for buffers error");
return FALSE;
}
if(req.count < 2)
{
return FALSE;
}
//mmap for buffers
buffers = (buffer*)calloc(req.count, sizeof(*buffers));
if(!buffers)
{
qDebug ("Out of memory");
return FALSE;
}
//将2个已申请到的缓冲帧映射到应用程序,用buffers 指针记录
for(n_buffers = 0; n_buffers < req.count; ++n_buffers)
{
v4l2_buffer buf;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
//query buffers
if(ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1)
{
qDebug("query buffer error");
return FALSE;
}
buffers[n_buffers].length = buf.length;
//map
buffers[n_buffers].start =
mmap(NULL, // start anywhere// allocate RAM*4
buf.length,
PROT_READ | PROT_WRITE,
MAP_SHARED,
fd, buf.m.offset);
if(MAP_FAILED == buffers[n_buffers].start)
{
qDebug("buffer map error\n");
return FALSE;
}
}
return TRUE;
}
int VideoDevice::start_capturing()
{
qDebug("start_capturing()");
unsigned int i;
for(i = 0; i < n_buffers; ++i)
{
v4l2_buffer buf;
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory =V4L2_MEMORY_MMAP;
buf.index = i;
if(-1 == ioctl(fd, VIDIOC_QBUF, &buf))
{
return FALSE;
}
}
v4l2_buf_type type;
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
/* 采集视频。使用命令 VIDIOC_STREAMON。*/
if(-1 == ioctl(fd, VIDIOC_STREAMON, &type))
{
return FALSE;
}
return TRUE;
}
int VideoDevice::stop_capturing()
{
qDebug("stop_capturing()");
v4l2_buf_type type;
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
if(ioctl(fd, VIDIOC_STREAMOFF, &type) == -1)
{
return FALSE;
}
return TRUE;
}
int VideoDevice::uninit_device()
{
qDebug("uninit_device()");
unsigned int i;
for(i = 0; i < n_buffers; ++i)
{
if(-1 == munmap(buffers[i].start, buffers[i].length))
{
qDebug("munmap error");
return FALSE;
}
}
delete buffers;
return TRUE;
}
int VideoDevice::get_frame(unsigned char ** yuv_buffer_pointer, size_t* len)
{
// qDebug("get_frame()");
v4l2_buffer queue_buf;
queue_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
queue_buf.memory = V4L2_MEMORY_MMAP;
/* 取出缓存中已经采样的缓存。使用命令 VIDIOC_DQBUF。视频数据存放的位置是buffers[n_buffers].start的地址处。 */
if(ioctl(fd, VIDIOC_DQBUF, &queue_buf) == -1)
{
qDebug("VIDIOC_DQBUF false");
return FALSE;
}
*yuv_buffer_pointer = (unsigned char *)buffers[queue_buf.index].start;
*len = buffers[queue_buf.index].length;
index = queue_buf.index;
return TRUE;
}
int VideoDevice::unget_frame()
{
// qDebug("unget_frame()");
if(index != -1)
{
v4l2_buffer queue_buf;
queue_buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
queue_buf.memory = V4L2_MEMORY_MMAP;
queue_buf.index = index;
if(ioctl(fd, VIDIOC_QBUF, &queue_buf) == -1)
{
qDebug("VIDIOC_QBUF false");
return FALSE;
}
return TRUE;
}
return FALSE;
}
/*yuv格式转换为rgb格式*/
int VideoDevice::convert_yuv_to_rgb_buffer(unsigned char** yuv_buffer_pointer, unsigned char* rgb_buffer)
{
unsigned long in, out = 0;
int y0, u, y1, v;
int r, g, b;
unsigned char* point = *yuv_buffer_pointer;
/* 由于后续RGB的数据要存储到BMP中,而BMP文件中颜色数据是“倒序”,即从下到上,从左到右,因而在向frame_buffer写数据时是从最后一行最左测开始写,每写满一行行数减一。 */
for(in = 0; in < IMAGEWIDTH * IMAGEHEIGHT * 2; in += 4)
{
y0 = point[in + 0];
u = point[in + 1];
y1 = point[in + 2];
v = point[in + 3];
r = y0 + (1.370705 * (v-128));
g = y0 - (0.698001 * (v-128)) - (0.337633 * (u-128));
b = y0 + (1.732446 * (u-128));
if(r > 255) r = 255;
if(g > 255) g = 255;
if(b > 255) b = 255;
if(r < 0) r = 0;
if(g < 0) g = 0;
if(b < 0) b = 0;
rgb_buffer[out++] = r;
rgb_buffer[out++] = g;
rgb_buffer[out++] = b;
r = y1 + (1.370705 * (v-128));
g = y1 - (0.698001 * (v-128)) - (0.337633 * (u-128));
b = y1 + (1.732446 * (u-128));
if(r > 255) r = 255;
if(g > 255) g = 255;
if(b > 255) b = 255;
if(r < 0) r = 0;
if(g < 0) g = 0;
if(b < 0) b = 0;
rgb_buffer[out++] = r;
rgb_buffer[out++] = g;
rgb_buffer[out++] = b;
}
return 0;
}
参考链接:
linux下通过V4L2驱动USB摄像头 https://blog.csdn.net/simonforfuture/article/details/78743800
USB摄像头的图片采集 https://www.cnblogs.com/surpassal/archive/2012/12/19/zed_webcam_lab1.html
视频的采集和动态显示 https://www.cnblogs.com/surpassal/archive/2013/01/12/zed_webcam_lab3.html
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)