一、环境修改
参考官方手册jMAVSim 仿真模拟 · PX4 Developer Guide,以上环境基于上一篇内容,未完成ROS+jmavsim+QGC环境搭建的请移步Ubuntu18.04下px4+MAVROSM+QGC地面站安装教程及避坑指南
下面开始正式内容,首先需要对环境进行适当更改
sudo apt install openjdk-8-jdk
sudo update-alternatives --config java # 选择Java 8 的指令
rm -rf Tools/jMAVSim/out
编辑accessibility.properties 文件:
sudo gedit /etc/java-8-openjdk/accessibility.properties
注释掉下面这行
#assistive_technologies=org.GNOME.Acessibility.AtkWrapper
二、 启动仿真
做好了以上准备工作后,输入以下命令,注意这句话可以代替make px4_sitl_default,同时也会启动jmavsim界面
make px4_sitl_default jmavsim

然后启动QGC地面站,此时 QGC会自动连接jmavsim,

在命令框内输入enter,然后输入
commander takeoff
如下图所示:

此时会看到飞机起飞,在起飞状态下,你可以在QGC中设置目标点,飞机会自动飞行到目标点,如下图所示。
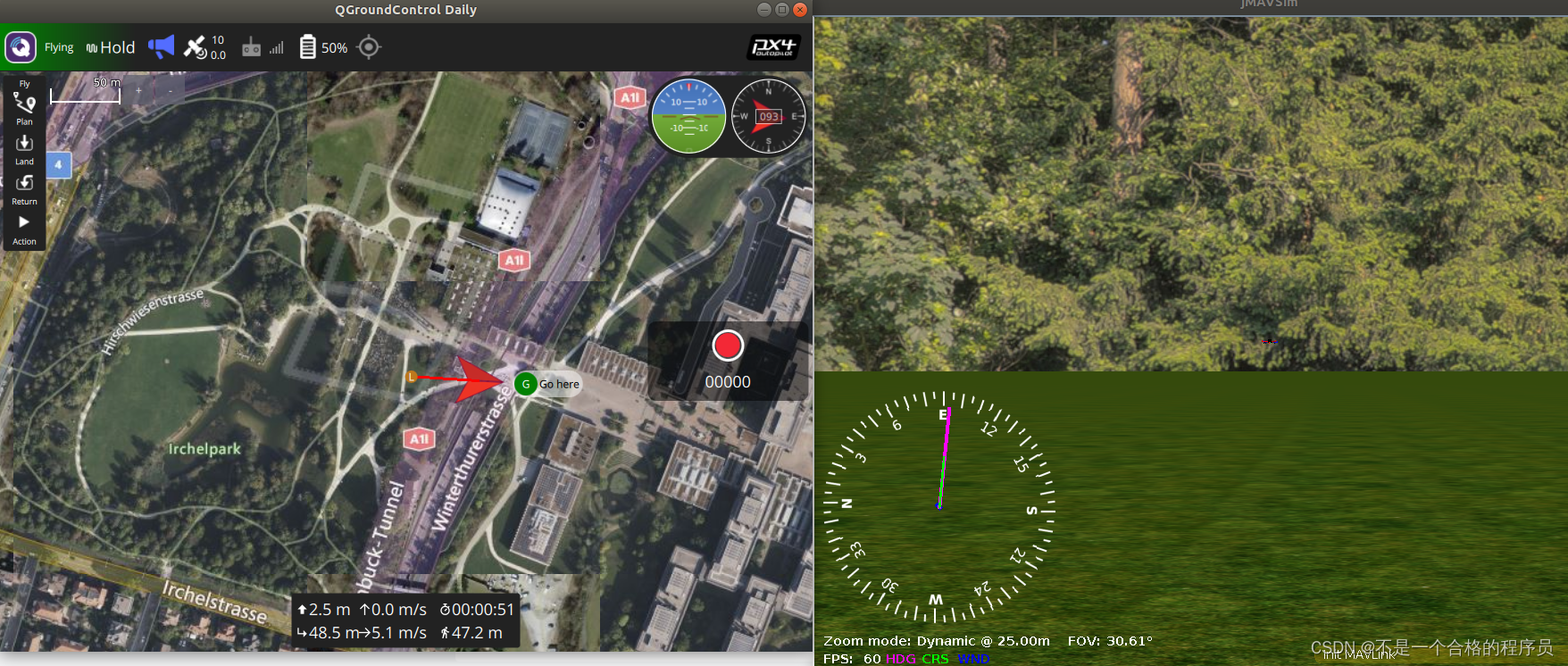
此时,就已经完成了一次软件在环仿真实验。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)