PX4编译
文章目录
- PX4编译
- 疑难杂症
- bug1
- bug2
- catkin_build_isolated
- 官方脚本
- Step1
- Step2 安装常用依赖
- Step3 创建并运行脚本
- Step4 补全代码子模块
- Step5 验证仿真
- 官方offboard 例程
- offboard控制
- 启动
- Step1:启动gazebo模型
- Step2:启动Mavros
- Step3:启动offboard示例程序
- 节点
- 利用launch文件同时启动Mavros和gazebo
- 更换模型
- 速度控制
-
- Apriltag 识别定位
- launch文件修改
- 位姿信息/tf或/tag_detections
疑难杂症
bug1
[gazebo-3] process has died [pid 19047, exit code 255]

gazebo崩溃,解决方式 :killall gzserver
bug2
OpenCV库没有添加链接
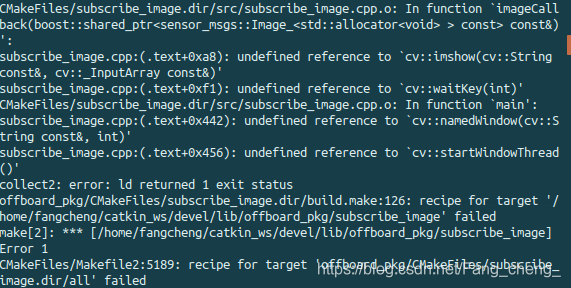
在CMakelists.txt末尾添加OpenCV库

catkin_build_isolated
单独编译各个包,如果遇到一个包有错,可以正常编译剩余的九个包。
source ./devel_isolated/setup.zsh
使用里面的包时,记得在新的终端进入catkin_ws要source环境变量:
source ./devel_isolated/setup.zsh
官方脚本
https://dev.px4.io/v1.9.0/en/setup/dev_env_linux_ubuntu.html
Step1
打开一个终端执行下面的命令,让当前用户从属dialout用户组,防止以后的权限问题。
sudo usermod -a -G dialout $USER
执行完这一之后,注销(关机),再重新登入(开机)
Step2 安装常用依赖
如果是一台没有安装ROS的新ubuntu18.04系统,可以直接使用脚本

这个脚本会帮你安装ROS,Gazebo, Mavros等工具
如果已经安装了desktop-full版本的ROS,则采用脚本

该脚本内容如下
trap "exit" INT TERM; trap "kill 0" EXIT; sudo -v || exit $?; sleep 1; while true; do sleep 60; sudo -nv; done 2>/dev/null &
echo "We must first remove modemmanager"
sudo apt-get remove modemmanager -y
echo "Installing common dependencies"
sudo apt-get update -y
sudo apt-get install git zip qtcreator cmake build-essential genromfs ninja-build exiftool astyle -y
which xxd || sudo apt install xxd -y || sudo apt-get install vim-common --no-install-recommends -y
sudo apt-get install python-argparse python-empy python-toml python-numpy python-dev python-pip -y
sudo -H pip install --upgrade pip
sudo -H pip install pandas jinja2 pyserial pyyaml
sudo -H pip install pyulog
fastrtps_dir=$HOME/eProsima_FastRTPS-1.7.1-Linux
echo "Installing FastRTPS to: $fastrtps_dir"
if [ -d "$fastrtps_dir" ]
then
echo " FastRTPS already installed."
else
pushd .
cd ~
wget https://www.eprosima.com/index.php/component/ars/repository/eprosima-fast-rtps/eprosima-fast-rtps-1-7-1/eprosima_fastrtps-1-7-1-linux-tar-gz -O eprosima_fastrtps-1-7-1-linux.tar.gz
tar -xzf eprosima_fastrtps-1-7-1-linux.tar.gz eProsima_FastRTPS-1.7.1-Linux/
tar -xzf eprosima_fastrtps-1-7-1-linux.tar.gz requiredcomponents
tar -xzf requiredcomponents/eProsima_FastCDR-1.0.8-Linux.tar.gz
cpucores=$(( $(lscpu | grep Core.*per.*socket | awk -F: '{print $2}') * $(lscpu | grep Socket\(s\) | awk -F: '{print $2}') ))
(cd eProsima_FastCDR-1.0.8-Linux && ./configure --libdir=/usr/lib && make -j$cpucores && sudo make install)
(cd eProsima_FastRTPS-1.7.1-Linux && ./configure --libdir=/usr/lib && make -j$cpucores && sudo make install)
rm -rf requiredcomponents eprosima_fastrtps-1-7-1-linux.tar.gz
popd
fi
echo "Installing jMAVSim simulator dependencies"
sudo apt-get install ant openjdk-8-jdk openjdk-8-jre -y
clone_dir=~/src
echo "Cloning PX4 to: $clone_dir."
if [ -d "$clone_dir" ]
then
echo " Firmware already cloned."
else
mkdir -p $clone_dir
cd $clone_dir
git clone https://github.com/PX4/Firmware.git
fi
Step3 创建并运行脚本
进入Home
gedit ubuntu_sim_common_deps.sh //创建脚本,再将上述内容复制进去
source ubuntu_sim_common_deps.sh //等待
如果报错,缺少包,则缺什么补什么
Step4 补全代码子模块
接下来补全代码的子模块,防止编译的时候出一下意外的问题。
cd arc/Firmware
git submodule update --init --recursive
Step5 验证仿真
首先编译jmavsim仿真验证。
cd src/Firmware
make px4_sitl jmavsim
如果没有什么问题会显示出下面的界面

终端输入下面的命令,飞机会起飞
commander takeoff
现在可以Ctrl/Command + C关掉继续进行下面的操作
输入下面的命令然后进行gazebo仿真的编译
cd src/Firmware
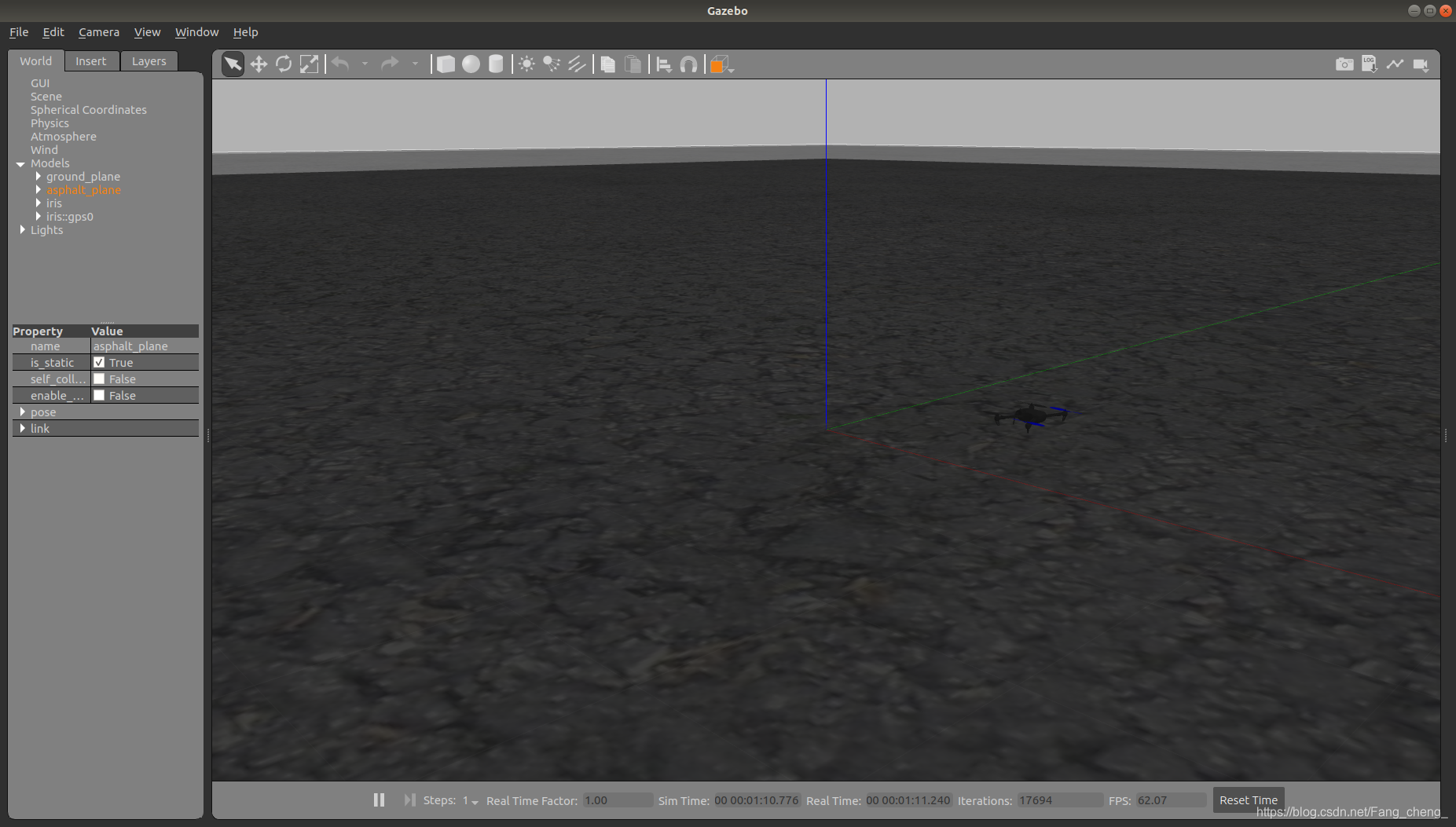
make px4_sitl gazebo
如果没有问题,gazebo正常打开,出现了一个小飞机.
官方offboard 例程
offboard控制
打开官方
https://dev.px4.io/v1.9.0/zh/ros/mavros_offboard.htmlMAVROS
Offboard control example链接,然后在catkin_ws/src目录中,运行命令
catkin_create_pkg offboard_pkg roscpp std_msgs geometry_msgs mavros_msgs
然后定位到目录~/catkin_ws/src/offboard_pkg/src/,新建一个文件offboard_node.cpp。
gedit offboard_node.cpp
将代码复制进去(官方示例):
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
ros::Rate rate(20.0);
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
然后打开目录~/catkin_ws/src/offboard_pkg/下的CMakeLists.txt添加下面的两行:
add_executable(offboard_node src/offboard_node.cpp)
target_link_libraries(offboard_node ${catkin_LIBRARIES})
然后到目录~/catkin_ws下,运行命令
catkin_make
等待编译完成后,如果你要在gazebo中仿真,运行命令(启动PX4的gazebo仿真环境)四旋翼无人机名字:iris
启动
Step1:启动gazebo模型
下面三个命令三选一
make px4_sitl gazebo_iris//四旋翼
make px4_sitl gazebo_iris_opt_flow//带双目摄像头的无人机
make px4_sitl_default gazebo // 效果和第一条代码一样
无人机模型可以更换,模型存放于目录/home/fangcheng/src/Firmware/Tools/sitl_gazebo/models
只需将gazebo_iris换成相应的模型即可:模型列表
https://dev.px4.io/v1.9.0/zh/simulation/gazebo.html
Step2:启动Mavros
然后在终端下运行命令启动Mavros:(官网也有) 目的是启动PX4与Mavros之间的连接。/home/fangcheng/src/Firmware/launch/px4.launch
roslaunch mavros px4.launch fcu_url:="udp://:14540@127.0.0.1:14557"
Step3:启动offboard示例程序
然后运行命令,启动示例程序
rosrun offboard_pkg offboard_node
然后进入gazebo中进行观察。
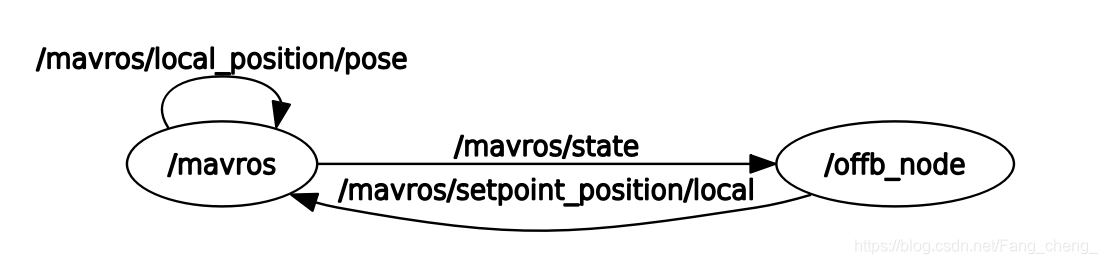
节点

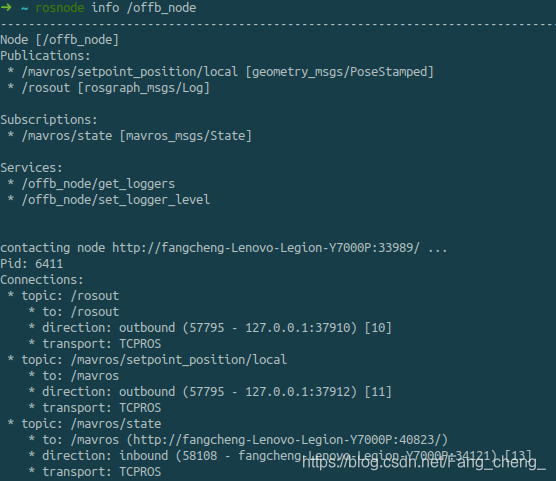
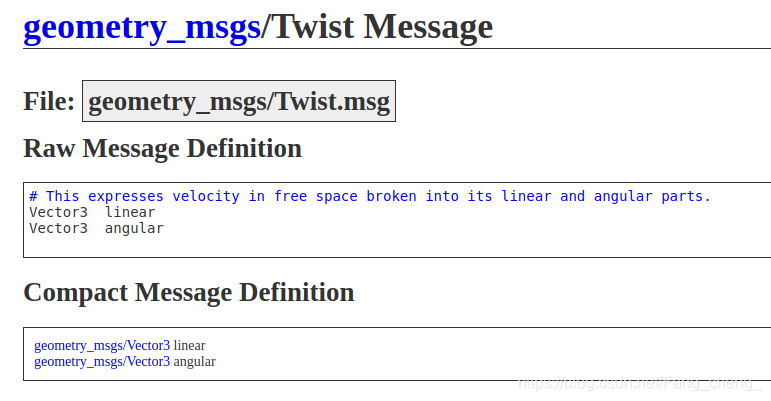
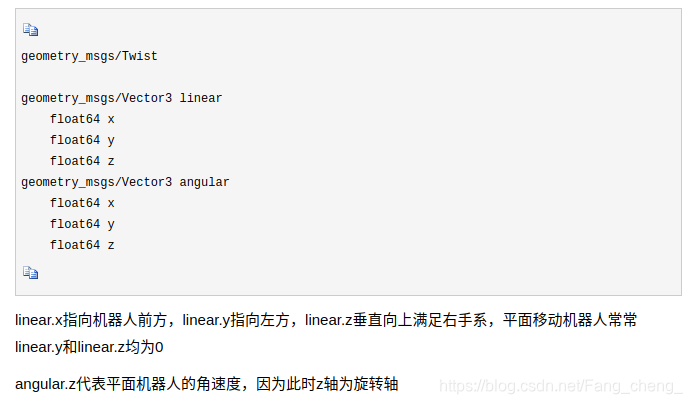
查看消息的具体格式
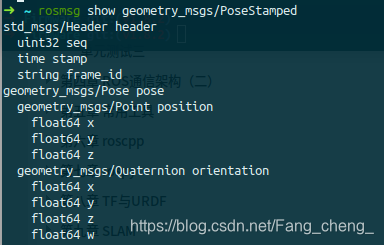

bool类型只有两个值:true or false
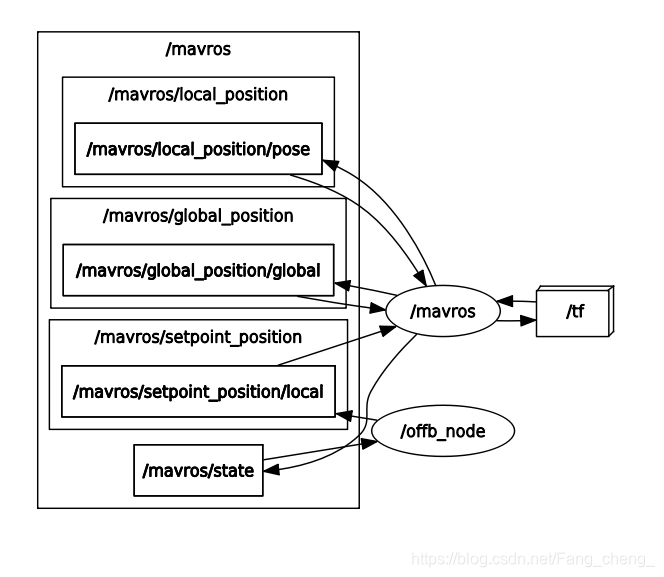
Nodes Only
利用launch文件同时启动Mavros和gazebo
打开一个终端依次输入
source ~/src/Firmware/Tools/setup_gazebo.bash ~/src/Firmware/ ~/src/Firmware/build/px4_sitl_default
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/src/Firmware
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/src/Firmware/Tools/sitl_gazebo
但每打开一个新的终端都这样做很麻烦,可以将以上代码添加到.zshrc末尾
gedit .zshrc
source ~/.zshrc
以后打开新的终端直接运行下面的launch即可
再运行固件库中写好的launch文件,存放于/home/fangcheng/src/Firmware/launch/mavros_posix_sitl.launch
此命令同时启动了mavros和gazebo
roslaunch px4 mavros_posix_sitl.launch
更换模型
在~/src/Firmware/Tools/sitl_gazebo/models中存放了许多模型,默认的模型为iris,常用的还有https://dev.px4.io/v1.9.0/zh/simulation/gazebo.html
其中iris_stereo_camera为带双目摄像头的模型,以此模型为例演示如何修改启动的模型
首先确认要更换的模型存在于~/src/Firmware/Tools/sitl_gazebo/models
打开/home/fangcheng/src/Firmware/launch/mavros_posix_sitl.launch文件,将第16行更改为
<arg name="sdf" default="$(find mavlink_sitl_gazebo)/models/iris_stereo_camera/iris_stereo_camera.sdf"/>
保存后再运行
roslaunch px4 mavros_posix_sitl.launch
查看话题,可以发现多了很多双目相关的话题
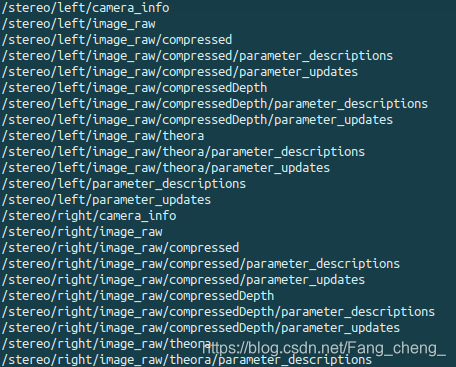
更换为单目摄像机 iris_fpv_cam,方法同上。但默认的摄像头不在下方,要改为下置摄像头,则需要改模型参数
将iris_fpv_cam.sdf中的0 0 0 0 0 0改成0 0 0 0 1.57 0

to

采集的图像话题为

可以使用 rqt_image_view来查看
速度控制
Topic1
mavros/setpoint_raw/local
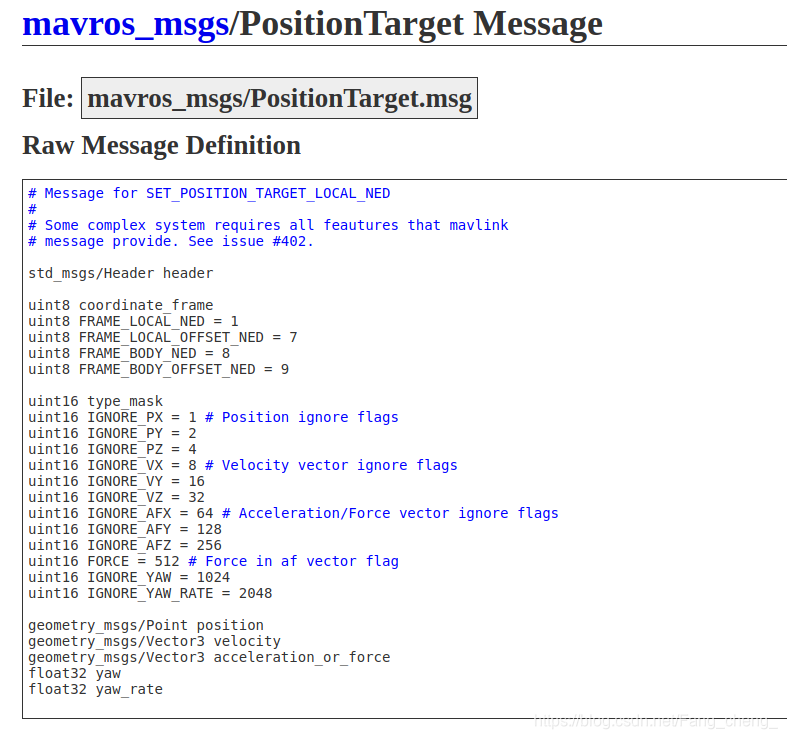
选择坐标系为FRAME_BODY_NED表示使用机身坐标系
当设置yaw_rate=pos.velocity.x或pos.velocity.y可以画圆。
Topic2
mavros/setpoint_velocity/cmd_vel_unstamped
相对本地gazebo坐标系,而非机身坐标系。
Apriltag 识别定位
CSDN:
https://blog.csdn.net/weixin_41139709/article/details/81385274?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-5.channel_param&depth_1-utm_source=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-5.channel_param
Tutorials:
http://wiki.ros.org/apriltag_ros/Tutorials/Detection%20in%20a%20video%20stream
launch文件修改
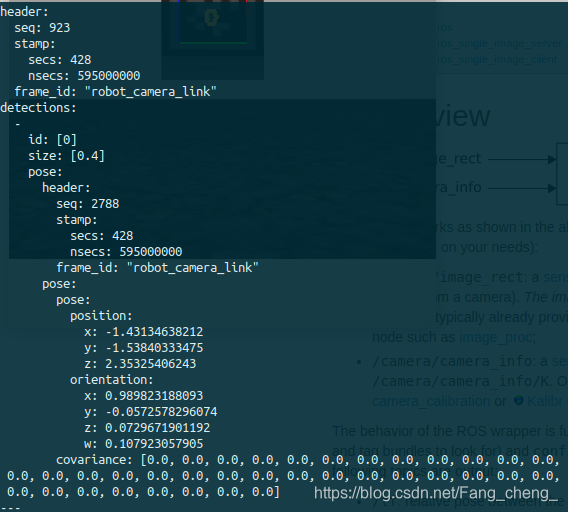
位姿信息/tf或/tag_detections

平移向量
相机后方,z为负,前方z为正;
相机左边,x为负,右边x为正;
相机上方,y为负,下方y为正。
/tag_detections tag相對於相機的坐標
相機與飛機的相對位姿爲(0,0,0,0,0,0)
/mavros/local_position/pose 飛機相對於世界的坐標
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)